
אווירודינמיקה רב-תכליתית: אפיון דחף על הקסאקופטר
Overview
מקור: פראשין שארמה ואלה מ. אטקינס, המחלקה להנדסת אוירונוטיקה וחלל, אוניברסיטת מישיגן, אן ארבור, MI
מולטי-קופטרים הופכים לפופולריים עבור מגוון רחב של תחביבים ויישומים מסחריים. הם זמינים בדרך כלל כמו רחפן (ארבעה מדחפים), hexacopter (שישה מדחפים), ותצורות תמנון (שמונה מדחפים). כאן, אנו מתארים תהליך ניסיוני כדי לאפיין את הביצועים multicopter. פלטפורמת הקסאקופטר קטנה ומודולרית המספקת יתירות יחידת הנעה נבדקת. דחף המנוע הסטטי הבודד נקבע באמצעות דינמומטר ופקודות מדחף וקלט שונות. דחף סטטי זה מיוצג לאחר מכן כפונקציה של סל"ד מוטורי, שבו הסל"ד נקבע מחשמל מוטורי וקלט בקרה. לאחר מכן, ההקסקופטר מותקן על עמדת בדיקת תא עומס במנהרת רוח חוזרת במהירות נמוכה בגודל 1.7 מ', ורכיבי המעלית האווירודינמית וכוח הגרירה שלו התאפיינו במהלך הטיסה באותות מנוע שונים, במהירות זרימת זרם חופשי ובזווית תקיפה.
Hexacopter נבחר למחקר זה בגלל עמידותו בפני מנוע (יחידת הנעה) כישלון, כפי שדווח בדלייה1. יחד עם יתירות במערכת ההנעה, הבחירה של רכיבי אמינות גבוהה נדרש גם לטיסה בטוחה, במיוחד עבור משימות באזורים מאוכלסים יתר על המידה. באמפטיס2, המחברים דנים בבחירה האופטימלית של חלקים רב-תכליתיים, כגון מנועים, להבים, סוללות ובקרי מהירות אלקטרוניים. מחקר דומה דווח גם ב Bershadsky3, המתמקד בבחירה נכונה של מערכת מדחף כדי לספק את דרישות המשימה. יחד עם יתירות ואמינות הרכיבים, הבנת ביצועי הרכב חיונית גם כדי להבטיח שמגבלות מעטפת הטיסה יכובדו ולבחור את העיצוב היעיל ביותר.
Principles
מולטי-קופטר הוא כלי טיס בעל רוטורים מרובים בהשוואה למסוקים מסורתיים, שיש להם רוטור ראשי אחד. רוטור מסוק מסורתי בעל גובה משתנה, המאפשר לטייס לשלוט במעלית ובהיגוי. לעומת זאת, מולטי-קופטרים מסתמכים על רוטורים בעלי גובה קבוע ומשתמשים בווריאציות במהירות המנוע לשליטה ברכב.
מגוון תצורות מולטי-קופטר שונות הופיעו, כגון רחפנים עם ארבעה רוטורים, hexacopters עם שישה רוטורים, ותמנונים עם שמונה רוטורים. בדרך כלל, multicopters יש מספר שווה של בכיוון השעון (CW) ונגד כיוון השעון (CCW) קבוע מדחפים המגרש, וריאציות במהירות של הרוטורים לגרום לסיבובים הבאים בתלת-ממד במהלך הטיסה:
- Yaw – סיבוב על הציר האנכי, וכתוצאה מכך שינוי זווית הכותרת
- גליל – סיבוב על הציר המצביע לכיוון חזית הרכב, וכתוצאה מכך תנועה מצד לצד
- גובה – סיבוב על הציר העובר משמאל לימין, וכתוצאה מכך תנועת הטיה קדימה ואחורה
ניתן לשלוט ב- Multicopters, כולל hexacopters, כדי לשמור על טיסה יציבה ביחס לדרגות החופש הבאות:
- רחף – כל המדחפים מופעלים בערך באותה מהירות ולכן מייצרים בערך את אותה דחף. מכיוון שכל המדחפים מרווחים באותה מידה ממרכז הכובד, הדחף של המדחפים אינו מייצר מומנט מסתובב נטו על המטוס. בנוסף, ההקסאקופטר משתמש בשלושה מדחפים מסתובבים בכיוון השעון (CW) ושלושה מדחפים מסתובבים נגד כיוון השעון (CCW) כך שהמומנט המדחף מבוטל כאשר הם פועלים במהירויות שוות. בריחוף, הדחף הכולל כלפי מעלה מאזן את כוח הכבידה כלפי מטה, והרב-תכליתי שומר על זוויות גובה וגלגל אפס בתנאי רוח אפס (גרירה).
- בקרת גליל – ניתן לשלוט בהקסאקופטר על ציר הגליל שלו על ידי הגדלת מהירות המדחפים בצד אחד והורדת מהירות המדחפים בצד השני. כאשר הדחף להגדיל בצד אחד זהה ירידה הדחף בצד הנגדי, דחף נטו נשאר זהה. באופן דומה, ההשפעה נטו של נטו של ממנט נשאר זהה.
- בקרת גובה – עבור משושה, בקרת גובה מקבילה לשליטה מתגלגלת. הפרש הדחף בין המדחפים הקדמיים והאחוריים גורם להקסאקופטר להגיש; אם הדחף גדל במדחפים האחוריים ויורד במדחפים הקדמיים, ההקסאקופטר מגיש קדימה.
- בקרת יאו – בקרת Yaw מושגת על ידי איזון מומנט סיבובי מדחף בכיוון השעון עם מומנט סיבוב מדחף נגד כיוון השעון. על ידי סיבוב המדחפים נגד כיוון השעון מהר יותר מאשר המדחפים בכיוון השעון (או להיפך), תגובת הרשת ההפוכה על ההקסאקופטר מניעה סיבוב ב- yaw.
סיכום נוסף של פיזיקת ההקסאקופטר מתואר להלן.
פרמטרים מוטוריים
מודל פרמטר גושי לפי Bangura4 משמש לציון הדחף והמומנט של כל יחידת מדחף מנוע /מדחף:
 (1)
(1)
 (2)
(2)
 שבו הוא הדחף שנוצר,
שבו הוא הדחף שנוצר,  הוא מומנט המנוע,
הוא מומנט המנוע,  הוא מקדם הדחף,
הוא מקדם הדחף,  הוא מקדם הרגע והוא מהירות הסיבוב המנוע
הוא מקדם הרגע והוא מהירות הסיבוב המנוע  סל"ד (מהפכות לדקה). ניתן לחשב את העוצמה והיעילות המוטורית מהמשוואות הבאות:
סל"ד (מהפכות לדקה). ניתן לחשב את העוצמה והיעילות המוטורית מהמשוואות הבאות:
 (3)
(3)
 (4)
(4)
 (5)
(5)
 איפה הכוח המכני שנוצר,
איפה הכוח המכני שנוצר,  הוא כניסת הכוח החשמלי במתח
הוא כניסת הכוח החשמלי במתח  וזרם ,
וזרם ,  והוא
והוא  היעילות המוטורית.
היעילות המוטורית.  נקבעים באופן ניסיוני באמצעות הנתונים המתקבלים מניסויי דינמומטר.
נקבעים באופן ניסיוני באמצעות הנתונים המתקבלים מניסויי דינמומטר.
הדינמיקה של הקסאקופטר
הדינמיקה של הקסאקופטר, כמתואר בדוקארד5 וכוחות6, מבוססת על מסגרות הייחוס המומחשות באיור 1, שם הציר האורתונורמלי המיוצג על ידי  מייצג מסגרת קואורדינטות עולמית עם מקור
מייצג מסגרת קואורדינטות עולמית עם מקור  ב. מסגרת הקואורדינטות העולמית היא מסגרת קבועה עם כל המסגרות האחרות המוגדרות ביחס אליה, מה שהופך אותה לנוחה לבטא את התרגום ואת הקינטמטיקה הסיבובית של הקסאקופטר. מסגרת קואורדינטת הגוף, שניתנת על ידי
ב. מסגרת הקואורדינטות העולמית היא מסגרת קבועה עם כל המסגרות האחרות המוגדרות ביחס אליה, מה שהופך אותה לנוחה לבטא את התרגום ואת הקינטמטיקה הסיבובית של הקסאקופטר. מסגרת קואורדינטת הגוף, שניתנת על ידי  מקור
מקור  , ממוקמת במרכז הכובד (CG) עבור ההקסאקופטר ומוגדרת ביחס למסגרת העולם; צירי מסגרת הגוף קבועים להקסאקופטר. מסגרת קואורדינטת הגוף משמשת להגדרת כיוון הדחף שנוצר על ידי ההקסאקופטר. בדרך כלל, עבור כלי טיס, מסגרת רוח מוגדרת גם עם מקורה ברכב CG. מסגרת הרוח משמשת כדי לבטא את הכוחות האווירודינמיים ואת הרגעים הפועלים על ההקסקופטר. עם זאת, לצורך ניסוי זה, אנו רואים את מסגרת העולם ואת מסגרת הרוח זהה כי הזרימה במנהרת הרוח היא תמיד אופקית; למידע נוסף על מסגרות התייחסות למטוסים, ראה מקלמרוך7.
, ממוקמת במרכז הכובד (CG) עבור ההקסאקופטר ומוגדרת ביחס למסגרת העולם; צירי מסגרת הגוף קבועים להקסאקופטר. מסגרת קואורדינטת הגוף משמשת להגדרת כיוון הדחף שנוצר על ידי ההקסאקופטר. בדרך כלל, עבור כלי טיס, מסגרת רוח מוגדרת גם עם מקורה ברכב CG. מסגרת הרוח משמשת כדי לבטא את הכוחות האווירודינמיים ואת הרגעים הפועלים על ההקסקופטר. עם זאת, לצורך ניסוי זה, אנו רואים את מסגרת העולם ואת מסגרת הרוח זהה כי הזרימה במנהרת הרוח היא תמיד אופקית; למידע נוסף על מסגרות התייחסות למטוסים, ראה מקלמרוך7.
ראשית, הנה מבוא לתמצית. L הוא אורך הזרוע מכל מנוע hexacopter למרכז הרכב במישור הגוף האופקי, וגודל דחף המנוע הכולל ניתן על ידי ופועל במסגרת הגוף z- כיוון. גודל המומנט ניתן על-ידי  עם כתב תחתי המייצג את ציר הייחוס של מסגרת הגוף.
עם כתב תחתי המייצג את ציר הייחוס של מסגרת הגוף.  ,
, 
 ומייצג את מקדמי הגרירה של הקסאקופטר לאורך כל רוח בהתאמה או ציר מסגרת עולמי שווה ערך,
ומייצג את מקדמי הגרירה של הקסאקופטר לאורך כל רוח בהתאמה או ציר מסגרת עולמי שווה ערך,  הוא המסה של ההקסאקופטר,
הוא המסה של ההקסאקופטר,  והוא תאוצת כבידה. כוח דחף כולל ומומנטים סיבוביים במונחים של ערכי סל"ד מוטורי ניתנים על-ידי:
והוא תאוצת כבידה. כוח דחף כולל ומומנטים סיבוביים במונחים של ערכי סל"ד מוטורי ניתנים על-ידי:
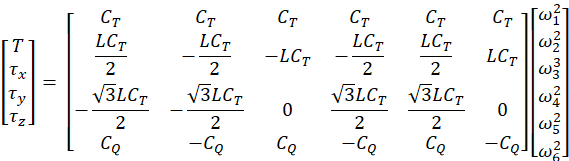 (6)
(6)
משוואות התנועה הליניארית של ניוטון במסגרת העולם יכולות להיות מוגדרות כ:
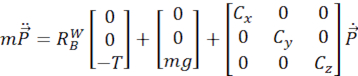 (7)
(7)
מטריצת סיבוב  מוגדרת על-ידי סיבוב זווית אוילר Z-X-Y:
מוגדרת על-ידי סיבוב זווית אוילר Z-X-Y:
 (8)
(8)
כאשר זווית ה- yaw (  ) היא סיבוב על ציר Z, זווית הגליל ( ) היא סיבוב על ציר
) היא סיבוב על ציר Z, זווית הגליל ( ) היא סיבוב על ציר  ה- X, זווית המגרש (
ה- X, זווית המגרש (  ) היא סיבוב על ציר ה- Y, וציין ה- Y,
) היא סיבוב על ציר ה- Y, וציין ה- Y,  הוא עבור כל זווית.
הוא עבור כל זווית.
בניסויים אלה, אנו עוסקים רק בכוחות אווירודינמיים הפועלים על ההקסאקופטר בתנועה ליניארית, אך לשלמות בהבנת הדינמיקה של ההקסאקופטר, משוואות הגישה של התנועה מוגדרות להלן. ראשית, p מוגדרת כמהירות זוויתית על ציר ה- Xשל הגוף, q הוא המהירות הזוויתית על ציר ה- Yשל הגוף, ו- r הוא המהירות הזוויתית על ציר Zשל הגוף.
 (9)
(9)
 הוא הכוח כלפי מעלה המופעל על-ידי מדחף i, ואני רגע ההקסאקופטר של מטריצת האינרציה שניתן לקבוע באמצעות מטוטלת דו-פילרית. מידע נוסף עבור הליך זה ניתן לקבל מ Quan8. מהירויות זוויתיות של מסגרת הגוף והעולם קשורות על-ידי:
הוא הכוח כלפי מעלה המופעל על-ידי מדחף i, ואני רגע ההקסאקופטר של מטריצת האינרציה שניתן לקבוע באמצעות מטוטלת דו-פילרית. מידע נוסף עבור הליך זה ניתן לקבל מ Quan8. מהירויות זוויתיות של מסגרת הגוף והעולם קשורות על-ידי:
 (10)
(10)
Procedure
פרוטוקול זה מאפיין דחף הקסקופטר ואווירודינמיקה. לניסוי זה, השתמשנו ברכיבים זמינים מסחרית, מחוץ למדף עבור ההקסקופטר, והפרטים מסופקים בטבלה 2. עבור בקר הטיסה, בחרנו טייס אוטומטי בקוד פתוח, Librepilot, 9 מכיוון שהוא סיפקגמישות לשלוט בפקודות מנוע בודדות שהונפקו להקסקופטר.
דוכן הבדיקות להרכבה של תא העומס וההקסאקופטר היה מפוברק בתוך הבית באמצעות דיקט למינציה ומוצג באיור 2. בעת תכנון עמדת הבדיקה, שים לב כי עליו לאפשר התאמה מדויקת של זווית ההתקפה של המולטי-קופטר ולהיות נוקשה מספיק כדי לעמוד בכוחות כיפוף ותנודות שנוצרו בעת הפעלת המנועים.
תא עומס בן 6 צירים נטען על עמדת הבדיקה ומחובר ללוח רכישת הנתונים, כפי שמוצג באיור 3. כוחות אווירודינמיים ודחוף חשים במסגרת הגוף של ההקסקופטר על ידי תא העומס. נתוני מד המתח עוברים דרך מרכך אותות. לוח רכישת הנתונים (DAQ) רוכש את רכיבי הכוח המומנט האנלוגיים באמצעות הליך כיול המסופק על-ידי יצרן תאי העומס. לוח DAQ מאחסן ערכים אלה במאגר במהירות גבוהה ומאוחר יותר לדיסק קבוע.
עבור פרוטוקול זה, ראשית, לקבוע את הכוחות שנוצרו על ידי המנועים בודדים. לאחר מכן לקבוע את הכוחות הפועלים על מסגרת האוויר חשוף, ואחריו קביעת הכוחות שנוצרו על ידי הקסאקופטר כולו כפונקציה של פקודות סל"ד מוטורי. הנפיק את אותן פקודות סל"ד לכל המנועים עבור כל בדיקה.
1. ניסוי דינמומטר
הדינמומטר מאפשר מדידה ישירה של פרמטרים, כולל דחף, מופך, סל"ד, מתח סוללה וזרם. לאחר מכן ניתן לגזור פרמטרים כגון חשמל, כוח מכני ויעילות מוטורית משוואות (3), (4) ו- (5).
- חבר את הדינמומטר למחשב DAQ באמצעות מחבר USB.
- הפעל את ממשק המשתמש הגרפי (GUI) שסופק עם הדינמומטר.
- כייל את הדינמומטר על-ידי ביצוע ההוראות המופיעות על המסך. השתמש משקולות וזרוע ידית ידועה כאשר תתבקש.
- הר את המנוע על עמדת הבדיקה של הדינמומטר.
- חברו את המדחף לתצורת משיכה (טרקטור), כפי שמוצג באיור 4.
- חבר את הסוללה לדינמומטר.
- אבטחו היטב את הדינמומטר לדבך העבודה באמצעות מהדקי C.
- הפעל את תוכנית קלט השלב ורשום את הפרמטרים הנמדדים, כולל דחף, מומנט, סל"ד מנוע, זרם מנוע, ופקודת "מצערת" של רוחב פעימה (PWM).
2. מבחן דחף סטטי
- הדק את ההקסאקופטר בדוכן בדיקת תא העומס באמצעות ברגים הרכבה.
- פתח את מערכת רכישת הנתונים (DAQ) והפעל את תוכנית הטיית מד עומס התאים.
- חבר את בקר הטיסה של הקסאקופטר למחשב באמצעות כבל מיקרו USB ופתח את תוכנת תחנת בקר הקרקע (GCS).
- חבר את ספק הכוח להקסאקופטר.
- בחר בכרטיסיה תצורה -> פלט ב- GCS. קשר את כל המנועים, ובדוק את הבדיקה החיה של הפלטים.
- הגדר את פקודת המצערת הרצויה ל- 1300 ms. ודא שבאפשרותך להפעיל את כל המנועים באמצעות אותה פקודת מצערת (PWM).
- תן למערכת להתייצב למשך מספר שניות ולאחר מכן הפעל את תוכנית DAQ כדי לאסוף נתונים מתא העומס.
- לאחר השלמת איסוף הנתונים, עצור את המנועים.
- חזור על שלבים 3. 6 עד 3.8 לפקודות מצערת 1500 ms ו 1700 ms.
- העבר נתונים המאוחסנים במערכת DAQ למחשב עיבוד נתונים ואחסון לטווח ארוך.
3. מבחן דחף דינמי
לערוך סדרה של בדיקות מנהרת רוח כדי לאפיין ולנתח את הכוחות האווירודינמיים הליניאריים של ההקסקופטר, בעיקר להרים ולגרור, על פני מגוון של מידות אוויר וזוויות שכיחות. במהלך ניסויי מנהרת הרוח, ההקסקופטר הוא הניח להיות בתנאי טיסה קבועים. לכן, הגודל של וקטור מהירות ההקסאקופטר זהה למהירות האוויר והניחו אופקית במסגרת העולם. כוחות הרמה וגרירה נובעים בעיקר מזרימת האוויר סביב ההקסאקופטר. שים לב כי כוחות הרמה וגרירה מניחים לאפיין את המעלית הכוללת וגרירה מוחלטת על hexacopter; כוחות הצד זניחים.
ההליך הניסיוני המבוצע בניסוי זה דומה לאלו שדווחו בפוסטר10 וראסל11. במהלך בדיקות מנהרת הרוח, ההקסאקופטר הונע על ידי ממיר כוח המחובר לחשמל בניין (AC) כדי להבטיח רמות הספק ומתח עקביות לאורך כל הבדיקות. שים לב כי מנועים ב- RPMs גבוהים יכולים לצרוך זרם ניכר; השתמש במד נמוך בחוט אורך קצר כדי למנוע ירידת מתח ניכרת על פני החוט במהלך הפעולה.
- הרכב את ההקסאקופטר בדוכן בדיקת תא העומס
- חבר את תא העומס למחשב DAQ וחבר את ההקסאקופטר ל- GCS באמצעות ההליך המתואר עבור בדיקת הדחף הסטטי.
- אבטחו את עמדת הבדיקה לבסיס מנהרת הרוח עם מהדקי C.
- ודא שהמולטי-קופטר נקי היטב מקירות מנהרת הרוח, הרצפה והתקרה כדי למזער הפרעות והשתקפות של זרימת הנחל החופשי.
- הר פיטו צינורות כמה מטרים מן hexacopter לדגום זרימת אוויר ללא הפרעה. חבר את חיישני הלחץ של הפיתות למערכת DAQ.
- הגדר את זווית הצליל עבור ההקסאקופטר ל- 0° על-ידי התאמת מפרק הציר של מעמד הבדיקה. במנהרת הרוח, זווית גובה ההקסאקופטר וזווית ההתקפה זהות.
- הפעל את תוכנית ההטיה כדי ליצור הטיות מתח תא עומס.
- אתחל את מנהרת הרוח למהירות הרוח של 2.2 מ'/ש'.
- לאחר שמהירות זרימת הזרם החופשית מתיישבת לערך הרצוי, אסוף קריאות FT בסיסיות מתא העומס עם מנועי hexacopter כבויים.
- אתחל את פקודת המצערת ל- 1300 ms, תן למנוסה במנהרת הרוח להתיישב לפני איסוף נתוני FT ו- pitot.
- חזור על שלבים 3.7 - 3.9 עבור פקודות מצערת של 1500 אלפיות שני ו- 1700 אלפיות שני.
- חזור על שלבים 3.5 - 3.10 עבור זוויות גובה שונות של hexacopter וערכי במהירות אווירית של מנהרת הרוח, כפי שציין בטבלה 1.
Results
בדיקות דינמומטר
באיור 5-6, העלילות ממחישות את השונות של דחף ומומנט, בהתאמה, עם הגדלת סל"ד מוטורי. ממגרשים אלה, ניתן לקבוע את סל"ד המנוע המינימלי הנדרש לרחף המוטורי. עלילה המציגה נתונים ממדחפים מרובים ניתן להשיג משארמה12. יתר על כן, ניתן לראות בבירור את היחסים הריבועיים בין דחף לעומת .RPM ורגע לעומת .RPM, המתוארים במשוואות (1) ו -(2). באמצעות קשר מרובע זה, אנו יכולים לקבוע את ואת  מקדמי עבור מדחף 6040, אשר כדלקמן:
מקדמי עבור מדחף 6040, אשר כדלקמן:

איור 7 מראה כי עלייה בסל"ד המקבילה לעלייה בצריכת החשמל גורמת לירידה ביעילות המנוע. ניסויים דומים יכולים להתבצע עבור מדחפים שונים כדי להשיג יעילות מוטורית עבור זוג מדחף המנוע. התוצאות מניסויים כאלה שימושיות במהלך תכנון הרכב כדי לקבוע את זוג המדחף המוטורי האופטימלי שישמש על המולטי-קופטר. החלטות אלה מבוססות על פרמטרי המשימה הרצויים, כגון משך הטיסה ומהירותה.
מכיוון שאין משוב חיישן סל"ד ישיר על ההקסאקופטר בעלות נמוכה, אנו מעריכים סל"ד על-ידי התאמת משטח על-פני סל"ד, הספק חשמלי ופקודת מצערת (PWM). התאמת משטח זו משמשת להערכת סל"ד כפונקציה של חשמל וערך PWM. בהתבסס על נתונים שנאספו מהדינמומטר, התאמת פני השטח מוצגת באיור 8, עם המשוואה המתאימה:



כאשר  הגדרת המנוע PWM (מצערת) מנורמלת על ידי ערך ההטיה הממוצע 1550
הגדרת המנוע PWM (מצערת) מנורמלת על ידי ערך ההטיה הממוצע 1550  עם סטיית תקן של 201.9
עם סטיית תקן של 201.9  , בעוד הוא מנורמל על ידי הטיה 71.11 W עם סטיית תקן של 55.75 W.
, בעוד הוא מנורמל על ידי הטיה 71.11 W עם סטיית תקן של 55.75 W.
לאחר ניתוח נתוני הדינמומטר, נאספה ערכת נתונים שנייה לצורך אימות וסיפקה כקלט  לתפקוד. לאחר מכן, התוצאות משורטטות בסדרת זמן של וריאציית סל"ד, כפי שניתן לראות באיור 9 ובאיור 10. התוויות אלה מאשרות שההתאמה מעריכה סל"ד עד לגבולות של 95% מהסל"ד בפועל, כפי שמוצג באיור 9.
לתפקוד. לאחר מכן, התוצאות משורטטות בסדרת זמן של וריאציית סל"ד, כפי שניתן לראות באיור 9 ובאיור 10. התוויות אלה מאשרות שההתאמה מעריכה סל"ד עד לגבולות של 95% מהסל"ד בפועל, כפי שמוצג באיור 9.
תוצאות מנהרת הרוח
ניסויים במנהרת הרוח נערכו בעקבות מטריצת הניסוי בטבלה 1. כדי להפחית את המורכבות, מצב זווית אפס (sidelip) נשמר בכל עת. הדבר עולה בקנה אחד עם רוב פרופילי הטיסה שבהם מצלמות וחיישנים אחרים מותקנים עם כיוון מועדף הפונה קדימה. וריאציה של גרירה והרמה משורטטת כנגד זוויות גובה שונות של ההקסאקופטר ומוצגות באיוריות 11 ו-12 , בהתאמה. שתי העלילות מראות כי הגדלת פקודת המצערת גורמת לעלייה משמעותית בכוח המעלית (דחף מנועי). באופן דומה, עלייה במהירות מנהרת הרוח גורמת לעלייה משמעותית בכוח הגרירה הפועל על הקסאקופטר. מגמות אלה עולות בקנה אחד עם משוואה (7).
מודל דחף סטטי דורש רק בדיקת דינמומטר. עם זאת, כדי לקבל הערכה מדויקת של דחף דינמי וגרירה, נדרשו ניסויים במנהרת רוח עם חישת תאי עומס FT. עם נתונים שנאספו, אנו יכולים לפתח טבלת בדיקת מידע של מקדמי ולגרור ,  כפונקציה של זווית המגרש וממהר אוויר של זרם חופשי כדי לאפשר מידול מדויק של hexacopter FT.
כפונקציה של זווית המגרש וממהר אוויר של זרם חופשי כדי לאפשר מידול מדויק של hexacopter FT.

איור 1. מסגרות קואורדינטות עולם וגוף התייחסות. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.

איור 2. עמדת בדיקת תא עומס מרובה-תכליתי. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.

איור 3. דיאגרמת מערכת רכישת נתוני מנהרת רוח (DAQ). אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.

איור 4. הגדרת דינמומטר. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.

איור 5. קשר בין דחף מנועי לסל"ד. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.

איור 6. קשר בין מומנט מוטורי לסל"ד. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
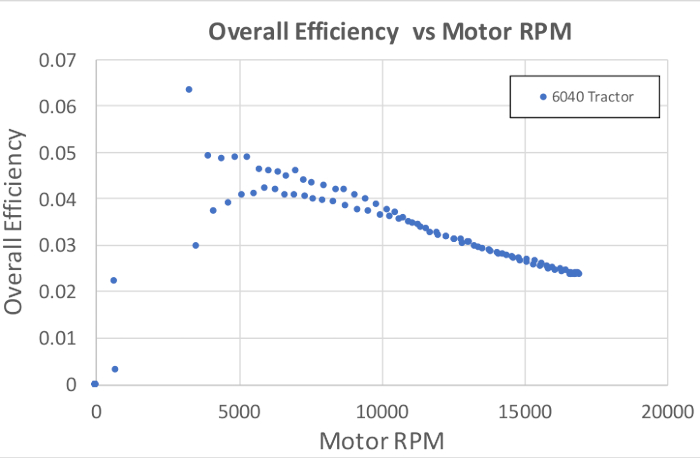
איור 7. יעילות מוטורית כוללת לעומת .RPM. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.

איור 8. משטח מתאים מעל מצערת (PWM), חשמל וסל"ד. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
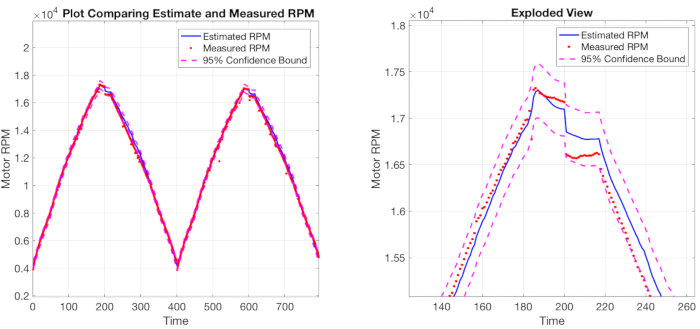
איור 9. אימות עם  סל"ד נמדד ישירות מד הדינמומטר. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
סל"ד נמדד ישירות מד הדינמומטר. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
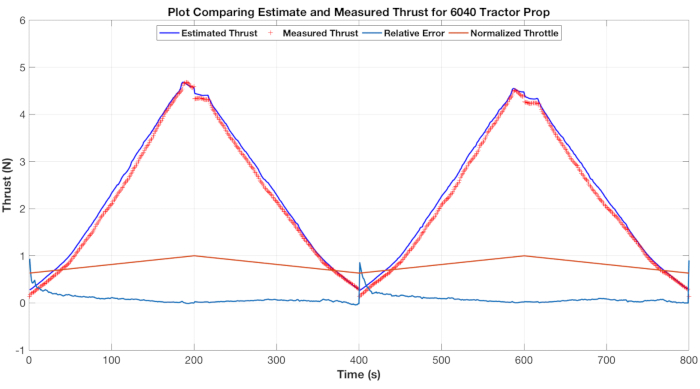
איור 10. אימות נתוני דחף משוערים עם נתוני דחף מדודים. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.

איור 11. טען הרמת תא וגרור כוחות לזוויות צליל שונות ופקודות מצערת בהינתן מהירות רוח קבועה של 5 מ'/ש'. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.

איור 12. טען הרמת תא וגרור כוחות לזוויות צליל שונות ופקודות מצערת בהינתן מהירות רוח קבועה של 8.47 מ'/ש'. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
טבלה 1. מטריצת מבחן מנהרת רוח
| מטריצת מבחן מנהרת רוח | |||
| מהירות רוח (מ/ש') | זווית גובה (°) | זווית ייאו(°) | פקודת מצערת (ms) |
| 2.2 | 30 עד -30 | 0 | 0 ו-1300 עד 1700 |
| 4.5 | 30 עד -30 | 0 | 0 ו-1300 עד 1700 |
| 6.7 | 30 עד -30 | 0 | 0 ו-1300 עד 1700 |
| 8.9 | 30 עד -30 | 0 | 0 ו-1300 עד 1700 |
טבלה 2. רשימת חלקים
| רשימת חלקים עבור הקסאקופטר | |||||
| האב לא | חלק לא | תיאור | אני מ"ג | קישור | כמות |
| 1 | מ"ט: 571000027-0 | ערכת הקסאקופטר ™ טוטם Q450 |  |
https://hobbyking.com/en_us/hobbykingtm-totem-q450-hexacopter-kit.html | 1 |
| 2 | מ"ט: 571000064-0 | OpenPilot CC3D מהפכת (Revo) 32bit מבוסס F4 בקר טיסה עם / משולב 433Mhz OPLink |  |
https://hobbyking.com/en_us/openpilot-cc3d-revolution-revo-32bit-flight-controller-w-integrated-433mhz-oplink.html | 1 |
| 3 | מ"ט: 571000065-0 | תחנת קרקע מיני Openpilot OPLink 433 מגה-הרץ |  |
https://hobbyking.com/en_us/openpilot-oplink-mini-ground-station-433-mhz.html | 1 |
| 4 | מ"ט: 9536000003-0 | רב-כוכבים עלית 2204-2300KV 3-4s 4 חבילה (2/CCW 2/CW) |  |
https://hobbyking.com/en_us/multistar-elite-2204-2300kv-set-of-4-cw-ccw-2-ccw-2-cw.html | 2 |
| 5 | מ"ק: 9192000131-0 | אפרו 20A מוטי רוטור ESC (קושחת סימונק) |  |
https://hobbyking.com/en_us/afro-esc-20amp-multi-rotor-motor-speed-controller-simonk-firmware.html | 8 |
| 6 | מ"ט: T2200.3S.30 | טרניג'י 2200mAh 3S 30C חבילת ליפו |  |
https://hobbyking.com/en_us/turnigy-2200mah-3s-30c-lipo-pack.html | 1 |
| 7 | 9171000144 | לוח חלוקת הכוח של מלך התחביבים |  |
https://hobbyking.com/en_us/hobby-king-octocopter-power-distribution-board.html | 1 |
| 8 | מ"ק: 426000022-0 | קינג קונגמולירוט הצעה 6x4 CW /CCW |  |
https://hobbyking.com/en_us/kingkong-multirotor-propeller-6x4-cw-ccw-black-20pcs.html | 1 |
| 8 | מ"ט: 329000304-0 | מדחף ג'מפן 5x3 שחור (CW/CCW) (2 יחידות) |  |
https://hobbyking.com/en_us/gemfan-propeller-5x3-black-cw-ccw-2pcs.html | 10 |
| 9 | - | מערכת משדר Spektrum DX6 MD2 עם מקלט AR610 |  |
https://www.amazon.com/Spektrum-Transmitter-System-AR610-Receiver/dp/B01B9DYOWG/ref=sr_1_2?ie=UTF8&qid=1494000219&sr=8-2&keywords=spektrum+dx6 | 1 |
| 10 | 709-RSP-1600-12 | החלפת ספקי כוח 1500W 12V 125A |  |
https://www.mouser.com/ProductDetail/Mean-Well/RSP-1600-12/?qs=%2fha2pyFadujYDPrAgY3T1JlGoR5AZMKL7jhmRydJUc1Z44%252bNekUvbQ%3d%3d | 1 |
| רשימת חלקים עבור DAQ | |||||
| האב לא | חלק לא | תיאור | אני מ"ג | קישור | כמות |
| 1 | ATHM800-256ALP Rev F | אתנה השנייה PC /104 SBC |  |
http://www.diamondsystems.com/products/athenaii | 1 |
| 2 | SI-145-5 | חיישן מיני 45 כוח /מנומנט |  |
http://www.ati-ia.com/products/ft/ft_models.aspx?id=Mini45 | 1 |
| 3 | - | תחביב כוח אוויר חיישן MPXV7002DP לחץ דיפרנציאלי |  |
https://www.amazon.com/Hobbypower-Airspeed-MPXV7002DP-Differential-controller/dp/B00WSFWO36/ref=pd_day0_21_2?_encoding=UTF8&pd_rd_i=B00WSFWO36&pd_rd_r=8KRZ03PR2XAJ1HXD4BKS&pd_rd_w=M1tek&pd_rd_wg=LVHjU&psc=1&refRID=8KRZ03PR2XAJ1HXD4BKS | 1 |
| רשימת חלקים עבור דינמומטר | |||||
| האב לא | חלק לא | תיאור | אני מ"ג | קישור | כמות |
| 1 | סדרה-1580 | דינמומטר בנצ'מרק RC |  |
https://www.rcbenchmark.com/dynamometer-series-1580/ | 1 |
Application and Summary
כאן אנו מתארים פרוטוקול לאפיין את הכוחות האווירודינמיים הפועלים על hexacopter. ניתן להחיל פרוטוקול זה על תצורות מרובות rotor אחרות ישירות. יש צורך באפיון נכון של כוחות אווירודינמיים כדי לשפר את תכנון הבקרה, להבין את מגבלות מעטפת הטיסה ולהעריך שדות רוח מקומיים כמו בשיאנג13. הפרוטוקול המוצג לקביעת סל"ד מוטורי המבוסס על צריכת חשמל ופקודת מצערת כולל יישומים ישירים להערכת סל"ד ודחף כאשר נעשה שימוש בבקרי מהירות אלקטרוניים (ESCs) בעלות נמוכה ללא חישת סל"ד. לבסוף, היישום של טכניקות בקרה מתקדמות, כגון בדגם בקרת חיזוי למעקב אחר מסלול, דורשים ידע באווירודינמיקה של הרכב וכוחות דחף, כמתואר ב כאמל14.
Tags
Skip to...
Videos from this collection:

Now Playing
אווירודינמיקה רב-תכליתית: אפיון דחף על הקסאקופטר
Aeronautical Engineering
9.2K Views

ביצועים אווירודינמיים של דגם מטוס: DC-6B
Aeronautical Engineering
8.3K Views

אפיון מדחף: שינויים ב-גובה, בקוטר ובמספר הלהב בביצועים
Aeronautical Engineering
26.5K Views

התנהגות חיל האוויר: התפלגות לחץ על כנף קלארק Y-14
Aeronautical Engineering
21.2K Views

ביצועי כנף קלארק Y-14: פריסה של התקנים בעלי הרמה גבוהה (מדפים ולוחות)
Aeronautical Engineering
13.5K Views

שיטת כדור מערבולת: הערכת איכות זרימת מנהרת הרוח
Aeronautical Engineering
8.7K Views

זרימה גלילית צולבת: מדידת התפלגות לחץ והערכת מקדמי גרירה
Aeronautical Engineering
16.3K Views

ניתוח זרבובית: וריאציות במספר ה-Mach ובלחץ לאורך התכנסות וזרבובית מתפצלת
Aeronautical Engineering
38.0K Views

שלירן הדמיה: טכניקה לדמיין תכונות זרימה על קולית
Aeronautical Engineering
11.8K Views

הדמיה של זרימה במנהרת מים: התבוננות במערבולת המובילה מעל כנף דלתא
Aeronautical Engineering
8.2K Views

הדמיה של זרימת צבע פני השטח: שיטה איכותית להתבוננות בדפוסי סטריקלין בזרימה על-קולית
Aeronautical Engineering
4.9K Views

צינור פיטו-סטטי: מכשיר למדידת מהירות זרימת האוויר
Aeronautical Engineering
49.3K Views

אנמומטריית טמפרטורה קבועה: כלי לחקר זרימת שכבת גבול סוערת
Aeronautical Engineering
7.3K Views

מתמר לחץ: כיול באמצעות צינור פיטו-סטטי
Aeronautical Engineering
8.5K Views

בקרת טיסה בזמן אמת: כיול חיישנים משובצים ורכישת נתונים
Aeronautical Engineering
10.3K Views
Copyright © 2025 MyJoVE Corporation. All rights reserved