
멀티콥터 공기역학: 헥사콥터 추력 특성화
Overview
출처: 프라신 샤르마와 엘라 엠 앳킨스, 항공 우주 공학과, 미시간 대학, 앤 아버, MI
멀티 콥터는 취미와 상업 응용 프로그램의 다양한 인기를 끌고있다. 그들은 일반적으로 쿼드 콥터 (4 개의 추진기), 헥사 콥터 (6 추진기), 옥토 콥터 (8 추진기) 구성으로 사용할 수 있습니다. 여기서는 멀티콥터 성능을 특성화하는 실험 과정을 설명합니다. 추진 유닛 중복성을 제공하는 모듈식 소형 헥사콥터 플랫폼이 테스트됩니다. 개별 정적 모터 추력은 동력계와 다양한 프로펠러 및 입력 명령을 사용하여 결정됩니다. 이 정적 추력은 모터 RPM의 함수로 표현되며, 여기서 RPM은 모터 출력 및 제어 입력에서 결정됩니다. 그런 다음 헥사콥터는 5' x 7'저속 재순환 풍동에 로드 셀 테스트 스탠드에 장착되고, 공기역학적 리프트 및 드래그 포스 구성 요소는 다양한 모터 신호, 프리 스트림 유량 속도 및 공격 각도에서 비행 중에 특징지어졌습니다.
헤사콥터는 Clothier1에보고된 바와 같이 모터(추진 단위) 고장에 대한 탄력성 때문에 이 연구를 위해 선택되었다. 추진 시스템의 중복성과 함께 안전한 비행, 특히 인구과잉 지역 임무를 위해서는 신뢰성이 높은 구성 요소의 선택이 필요합니다. Ampatis2에서저자는 모터, 블레이드, 배터리 및 전자 속도 컨트롤러와 같은 멀티 콥터 부품의 최적의 선택에 대해 논의합니다. 또한 미션 요구 사항을 충족하기 위해 프로펠러 시스템의 적절한 선택에 초점을 맞춘 Bershadsky3에서도유사한 연구가 보고되었습니다. 부품의 중복성 및 신뢰성과 함께 차량 성능을 이해하는 것은 비행 봉투 제한을 준수하고 가장 효율적인 설계를 선택하는 데 필수적입니다.
Principles
멀티콥터는 하나의 주요 로터가있는 전통적인 헬리콥터에 비해 여러 로터가있는 공중 차량입니다. 전통적인 헬리콥터 로터는 가변 피치를 가지고 있어 조종사가 리프트와 조향을 제어할 수 있습니다. 반면 멀티콥터는 고정 피치 로터에 의존하고 차량 제어를 위해 모터 속도의 변형을 사용합니다.
4개의 로터가 있는 쿼드콥터, 6개의 로터가 있는 헥사콥터, 8개의 로터가 있는 옥토콥터 등 다양한 멀티콥터 구성이 등장했습니다. 일반적으로 멀티콥터는 동일한 수의 시계 방향(CW) 및 시계 반대 방향(CCW) 고정 피치 프로펠러를 가지며 로터 속도의 변화로 인해 비행 중 3D로 다음과 같은 회전이 발생합니다.
- Yaw – 세로 축에 대한 회전, 헤딩 각도 변경의 결과
- 롤 – 축을 향해 회전하여 차량 의 전면을 향하여 좌우 로 이동합니다.
- 피치 – 왼쪽에서 오른쪽으로 실행되는 축에 대한 회전으로 인해 앞뒤로 기울어짐 동작이 발생합니다.
육사콥터를 포함한 멀티 콥터는 다음과 같은 자유도에 대해 안정적인 비행을 유지하기 위해 제어 할 수 있습니다.
- 호버 – 모든 프로펠러는 거의 동일한 속도로 작동하므로 거의 동일한 추력을 생성합니다. 모든 프로펠러는 무게 중심에서 동등하게 간격을 두므로 프로펠러의 추력은 항공기에 그물 회전 토크를 생성하지 않습니다. 또한 헥사콥터는 3개의 시계 방향(CW) 회전 프로펠러와 3개의 시계 반대 방향으로 회전 프로펠러를 사용하여 프로펠러 토크가 동일한 속도로 작동할 때 취소됩니다. 호버에서 총 위쪽 추력은 아래쪽 중력의 균형을 맞추고 멀티콥터는 제로 바람(drag) 조건에서 제로 피치와 롤 각도를 유지합니다.
- 롤 컨트롤 – 한쪽의 프로펠러 속도를 높이고 다른 쪽의 프로펠러 속도를 줄임으로써 굴축에 대해 헥사콥터를 제어할 수 있습니다. 한쪽의 추력 증가가 반대쪽의 추력 감소와 같을 때, 그물 추력은 동일하게 유지됩니다. 마찬가지로 토크의 순 효과는 동일하게 유지됩니다.
- 피치 컨트롤 - 헥사콥터의 경우 피치 컨트롤은 롤 컨트롤과 유사합니다. 전방및 후방 프로펠러 사이의 추력 차동은 헥사콥터가 피치를 일으킵니다. 후방 프로펠러에서 추력이 증가하고 전방 프로펠러에서 감소하면 육사콥터가 앞으로 투구합니다.
- Yaw Control – 시계 방향 프로펠러 회전 토크와 시계 방향 프로펠러 회전 토크의 균형을 맞추어 야우 컨트롤을 실현합니다. 시계 방향 프로펠러(또는 그 반대)보다 시계 반대 방향으로 프로펠러를 빠르게 회전시킴으로써 헥사콥터의 반대 순 반응은 야우의 회전을 유도합니다.
육각형 물리학에 대한 추가 요약은 아래에 설명되어 있습니다.
모터 파라미터
Bangura4에 따라 덩어리 매개 변수 모델은 각 모터 / 프로펠러 추진기 장치의 추력 및 토크를 지정하는 데 사용됩니다.
 (1)
(1)
 (2)
(2)
 여기서 추력이
여기서 추력이  생성되고, 모터 토크이고,
생성되고, 모터 토크이고,  추력
추력  계수이며, 순간 계수이며
계수이며, 순간 계수이며  RPM의 모터 회전 속도(분당 회전 속도)입니다. 모터 전력 및 효율성은 다음 방정식에서 계산할 수 있습니다.
RPM의 모터 회전 속도(분당 회전 속도)입니다. 모터 전력 및 효율성은 다음 방정식에서 계산할 수 있습니다.
 (3)
(3)
 (4)
(4)
 (5)
(5)
 여기서 생성된 기계적
여기서 생성된 기계적  전력은 전압 및 전류에서 전력
전력은 전압 및 전류에서 전력 

 입력이며, 모터 효율이다.
입력이며, 모터 효율이다.  동력계 실험에서 얻은 데이터를 사용하여 실험적으로 결정된다.
동력계 실험에서 얻은 데이터를 사용하여 실험적으로 결정된다.
헥사콥터 역학
두카드5 및 Powers6에설명된 바와 같이 육각형의 역학은 도 1에도시된 참조 프레임을 기반으로 하며, 여기서 수직축이  원점이 있는 세계 좌표 프레임을
원점이 있는 세계 좌표 프레임을  나타낸다. 세계 좌표 프레임은 다른 모든 프레임이 정의된 고정 프레임으로, 육각형의 번역 및 회전 운동학을 편리하게 표현할 수 있습니다. 원점으로 주어진 바디 좌표
나타낸다. 세계 좌표 프레임은 다른 모든 프레임이 정의된 고정 프레임으로, 육각형의 번역 및 회전 운동학을 편리하게 표현할 수 있습니다. 원점으로 주어진 바디 좌표 
 프레임은 육사콥터의 무게 중심(CG)에 위치하며 세계 프레임에 대하여 정의되며, 바디 프레임 축은 육사콥터에 고정된다. 본체 좌표 프레임은 헥사콥터에 의해 생성된 추력방향을 정의하는 데 사용됩니다. 일반적으로 공중 차량의 경우 윈드 프레임은 차량 CG에서 그 기원으로 정의됩니다. 윈드 프레임은 헥사콥터에서 작용하는 공기역학적 힘과 순간을 표현하는 데 사용됩니다. 그러나, 이 실험의 목적을 위해, 우리는 풍동의 흐름이 항상 수평이기 때문에 세계 프레임과 바람 프레임을 동일하게 고려합니다. 항공기 참조 프레임에 대한 자세한 내용은 McClamroch7을참조하십시오.
프레임은 육사콥터의 무게 중심(CG)에 위치하며 세계 프레임에 대하여 정의되며, 바디 프레임 축은 육사콥터에 고정된다. 본체 좌표 프레임은 헥사콥터에 의해 생성된 추력방향을 정의하는 데 사용됩니다. 일반적으로 공중 차량의 경우 윈드 프레임은 차량 CG에서 그 기원으로 정의됩니다. 윈드 프레임은 헥사콥터에서 작용하는 공기역학적 힘과 순간을 표현하는 데 사용됩니다. 그러나, 이 실험의 목적을 위해, 우리는 풍동의 흐름이 항상 수평이기 때문에 세계 프레임과 바람 프레임을 동일하게 고려합니다. 항공기 참조 프레임에 대한 자세한 내용은 McClamroch7을참조하십시오.
첫째, 여기에 표기서에 대한 소개입니다. L은 각 육각형 모터에서 수평 차체 평면의 차량 중심으로 의 팔 길이이며, 총 모터 추력 크기는 체체 프레임 z-방향에의해 주어지고 작용한다. 토크 크기는 바디  프레임 기준 축을 나타내는 서브스크립트로 주어집니다.
프레임 기준 축을 나타내는 서브스크립트로 주어집니다. 



 모터 RPM 값의 관점에서 총 추력 력과 회전 토크는 다음을 제공합니다.
모터 RPM 값의 관점에서 총 추력 력과 회전 토크는 다음을 제공합니다.
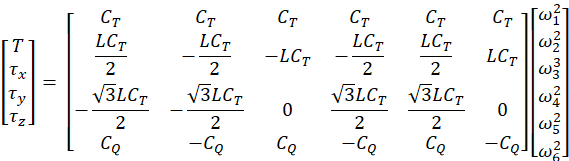 (6)
(6)
그런 다음 월드 프레임에서 뉴턴의 선형 모션 방정식을 다음과 같이 정의할 수 있습니다.
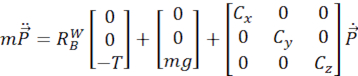 (7)
(7)
회전  행렬은 Z-X-Y 오일러 각도 회전에 의해 정의됩니다.
행렬은 Z-X-Y 오일러 각도 회전에 의해 정의됩니다.
 (8)
(8)
여기서  야각도()는 Z축에 대해 회전하는 경우, 롤
야각도()는 Z축에 대해 회전하는 경우, 롤  각도()는 X축에 대한 회전이고, 피치
각도()는 X축에 대한 회전이고, 피치  각도()는 Y축에 대한 회전이고, 약기 표기는
각도()는 Y축에 대한 회전이고, 약기 표기는  각 각도에 대한 것이다.
각 각도에 대한 것이다.
이러한 실험에서는 선형 모션으로 육각형에 작용하는 공기역학력에만 관심이 있지만, 육각형의 역학을 이해하는 완전성을 위해 모션의 태도 방정식은 아래에 정의됩니다. 먼저, p는 신체의 X축에대한 각도 속도로 정의되고, q는 신체의 Y축에대한 각 속도이며, r은 신체의 Z-축에 대한 각도 속도이다.
 (9)
(9)
 추진기 i에 의해 가해지는 상향 력이며, 비필라 진자로 결정할 수 있는 관성 매트릭스의 헥사콥터 모멘트이다. 이 절차에 대한 자세한 내용은 Quan8에서얻을 수 있습니다. 바디 및 월드 프레임 각 속도는 다음과 관련이 있습니다.
추진기 i에 의해 가해지는 상향 력이며, 비필라 진자로 결정할 수 있는 관성 매트릭스의 헥사콥터 모멘트이다. 이 절차에 대한 자세한 내용은 Quan8에서얻을 수 있습니다. 바디 및 월드 프레임 각 속도는 다음과 관련이 있습니다.
 (10)
(10)
Procedure
이 프로토콜은 헥사콥터 추력 및 공기 역학을 특징으로합니다. 이 실험을 위해, 우리는 헥사 콥터에 대한 상용 부품을 상용 부품을 사용하고, 세부 사항은 표 2에 제공됩니다. 비행 컨트롤러의 경우, 우리는 헥사 콥터에 발행 된 개별 모터 명령을 제어 할 수있는 유연성을 제공으로 오픈 소스 오토 파일럿, Librepilot,9을 선택했다.
로드셀 및 헥사콥터를 장착하기 위한 테스트 스탠드는 적층 합판을 사용하여 사내에서 제작되었으며 도 2에도시되어 있다. 테스트 스탠드를 설계할 때 멀티콥터의 공격 각도를 정확하게 조정할 수 있어야 하며 모터를 작동하면서 생성된 굽힘 및 진동을 견딜 수 있을 것으로 충분히 견고해야 합니다.
6축 로드 셀은 도 3에도시된 바와 같이 테스트 스탠드에 장착되어 데이터 수집 보드에 연결됩니다. 공기역학적 및 추력은 로드 셀에 의해 육각형의 체내에서 감지됩니다. 스트레인 게이지 데이터는 신호 컨디셔너를 통과합니다. 그런 다음 데이터 수집(DAQ) 보드는 로드 셀 제조업체에서 제공하는 교정 절차를 사용하여 아날로그 힘 및 토크 구성 요소를 획득합니다. 그런 다음 DAQ 보드는 이러한 값을 고속 버퍼에 저장하고 나중에 영구 디스크에 저장합니다.
이 프로토콜의 경우 먼저 개별 모터에 의해 생성된 힘을 결정합니다. 그런 다음 맨기 기체에서 작용하는 힘을 결정한 다음 전체 헥사콥터에서 생성 된 힘을 모터 RPM 명령의 함수로 결정합니다. 각 테스트에 대해 모든 모터에 동일한 RPM 명령을 발행합니다.
1. 동력계 실험
동력계를 통해 추력, 토크, RPM, 배터리 전압 및 전류를 포함한 파라미터를 직접 측정할 수 있습니다. 그런 다음 전력, 기계적 전력 및 모터 효율과 같은 매개 변수는 방정식(3), (4) 및 (5)에서 파생될 수 있습니다.
- USB 커넥터를 사용하여 다이나미터를 DAQ 컴퓨터에 연결합니다.
- 동력계와 함께 제공되는 그래픽 사용자 인터페이스(GUI)를 실행합니다.
- 제공된 화면 지침에 따라 동력계를 교정합니다. 프롬프트시 가중치와 알려진 레버 암을 사용합니다.
- 동력계 테스트 스탠드에 모터를 장착합니다.
- 도 4와같이 프로펠러를 풀러(트랙터) 구성에 부착한다.
- 배터리를 동력계에 연결합니다.
- C-클램프를 사용하여 작업대까지 동력계를 단단히 고정합니다.
- 단계 입력 프로그램을 실행하고 추력, 토크, 모터 RPM, 모터 전류 및 펄스 폭 변조(PWM) "스로틀" 명령을 포함한 측정된 매개변수를 기록합니다.
2. 정적 추력 테스트
- 장착 나사를 사용하여 로드 셀 테스트 스탠드에 헥사콥터를 고정합니다.
- DAQ(데이터 수집 시스템)를 열고 로드 셀 스트레인 게이지 바이어스 프로그램을 실행합니다.
- 마이크로 USB 케이블을 사용하여 육사콥터 비행 컨트롤러를 컴퓨터에 연결하고 지상 컨트롤러 스테이션(GCS) 소프트웨어를 엽니다.
- 전원 공급 장치를 육사콥터에 연결합니다.
- GCS에서 구성 탭-> 출력을 선택합니다. 모든 모터를 연결하고 출력의 라이브 테스트를 확인합니다.
- 원하는 스로틀 명령을 1300ms로 설정합니다. 동일한 스로틀(PWM) 명령으로 모든 모터를 작동할 수 있는지 확인합니다.
- 시스템이 몇 초 동안 안정화한 다음 DAQ 프로그램을 실행하여 로드 셀에서 데이터를 수집합니다.
- 데이터 수집이 완료되면 모터를 중지합니다.
- 3단계를 반복합니다. 스로틀 명령 1500 ms 및 1700 ms에 대한 6 ~ 3.8.
- DAQ 시스템에 저장된 데이터를 데이터 처리 컴퓨터 및 장기 저장소로 전송합니다.
3. 동적 추력 테스트
다양한 공기 속도와 발생 각도를 통해 육각형의 선형 공기역학력을 특성화하고 분석하기 위해 일련의 풍동 테스트를 수행합니다. 풍동 실험 중에 육사콥터는 안정적인 비행 조건으로 가정됩니다. 따라서 육사콥터 속도 벡터의 크기는 세계 프레임에서 공기 속도와 수평으로 가정되는 것과 동일합니다. 리프트 및 드래그 힘은 주로 헥사콥터 주변의 공기 흐름 때문입니다. 리프트 및 드래그 힘은 헥사콥터의 총 리프트 및 총 드래그를 특징으로 하는 것으로 가정됩니다. 측면 힘은 무시할 수 있습니다.
이 실험에서 수행된 실험 절차는 포스터10 및 러셀11에서보고된 것과 유사합니다. 풍동 테스트 중, 헥사콥터는 모든 테스트에서 일관된 전력 및 전압 수준을 보장하기 위해 건물(AC) 전력에 연결된 전력 컨버터에 의해 구동되었습니다. 높은 RM의 모터는 상당한 전류를 소비할 수 있습니다. 낮은 게이지와 짧은 길이 와이어를 사용하여 작동 중에 와이어 전체에 상당한 전압 강하를 방지할 수 있습니다.
- 로드 셀 테스트 스탠드에 헥사콥터 장착
- 로드 셀을 DAQ 컴퓨터에 연결하고 정적 추력 테스트에 설명된 절차를 사용하여 헥사콥터를 GCS에 연결합니다.
- C-클램프로 윈드 터널 의 기지에 테스트 스탠드를 고정합니다.
- 멀티콥터가 풍동 벽, 바닥 및 천장이 잘 지워서 자유로운 흐름 의 방해와 반사를 최소화해야 합니다.
- 육사콥터에서 몇 미터 떨어진 피토 튜브를 마운트하여 방해받지 않는 기류를 샘플링합니다. 피토 압력 센서를 DAQ 시스템에 연결합니다.
- 시험 스탠드의 힌지 조인트를 조정하여 육각형의 피치 각도를 0°로 설정합니다. 풍동에서 육각형 피치 각도와 공격 각도는 동일합니다.
- 바이어스 프로그램을 실행하여 부하 셀 전압 바이어스를 설정합니다.
- 풍구를 2.2m/s의 풍속으로 초기화합니다.
- 자유 스트림 흐름 속도가 원하는 값으로 정산되면 헥사콥터 모터가 꺼져 있는 로드 셀에서 기준FT 판독값을 수집합니다.
- 스로틀 명령을 1,300ms로 초기화하고, FT 및 피토 데이터를 수집하기 전에 풍속의 공기 속도가 정착하도록 하십시오.
- 1500 ms와 1700 ms의 스로틀 명령에 대한 3.7 - 3.9 단계를 반복합니다.
- 표 1에 명시된 대로 다양한 헥사콥터 피치 각도 및 풍동 공기 속도 값에 대해 3.5 - 3.10 단계를 반복합니다.
Results
동력계 테스트
그림 5-6에서플롯은 모터 RPM이 증가함에 따라 추력과 토크의 변형을 각각 보여줍니다. 이러한 플롯에서 멀티콥터가 호버링하는 데 필요한 최소 모터 RPM을 결정할 수 있습니다. 여러 프로펠러에서 데이터를 보여주는 플롯은 샤르마12에서얻을 수 있습니다. 또한 추력 대.RPM 및 모멘트.RPM 대 사이의 이차 관계는 방정식(1)과 (2)에 기재된 명확하게 관찰될 수 있다. 이 이 사분적 관계를 사용하여  다음과 같은 6040 프로펠러의 계수를 결정할 수 있습니다.
다음과 같은 6040 프로펠러의 계수를 결정할 수 있습니다.

그림 7은 전력 소비의 증가에 대응하는 RPM의 증가로 인해 모터 효율이 저하되는 것을 보여줍니다. 모터 프로펠러 쌍에 대한 모터 효율을 얻기 위해 다양한 프로펠러에 대해 유사한 실험을 수행할 수 있습니다. 이러한 실험의 결과는 차량 설계 중에 멀티콥터에서 사용되는 최적의 모터 프로펠러 쌍을 결정하는 데 유용합니다. 이러한 결정은 비행 의 지속 시간 및 속도와 같은 원하는 임무 매개 변수를 기반으로합니다.
저비용 육각형에 대한 직접적인 RPM 센서 피드백이 없기 때문에 RPM, 전력 및 스로틀(PWM) 명령에 걸쳐 표면을 피팅하여 RPM을 추정합니다. 이 표면 적합성은 RPM을 전력 및 PWM 값의 함수로 추정하는 데 사용됩니다. 동력계에서 수집된 데이터를 기반으로 표면 적합성은 그림 8에표시되며 해당 방정식은 다음과 같습니다.



 여기서 는 201.9의 표준 편차로 평균 바이어스 값(1550)에 의해 정규화된 모터 PWM(스로틀)
여기서 는 201.9의 표준 편차로 평균 바이어스 값(1550)에 의해 정규화된 모터 PWM(스로틀) 
 설정이며, 55.75W의 표준 편차로 바이어스 71.11 W에 의해 정상화된다.
설정이며, 55.75W의 표준 편차로 바이어스 71.11 W에 의해 정상화된다.
동력계 데이터를 분석한 후 유효성 검사를 위해 두 번째 데이터 집합을 수집하고 기능에 대한 입력으로  제공되었습니다. 그런 다음 결과는 그림 9 및 그림 10에서볼 수 있듯이 RPM 변형의 시계열로 플롯됩니다. 이러한 플롯은 적합도 9와같이 RPM을 실제 RPM의 95% 범위 내에서 추정하는 것을 확인합니다.
제공되었습니다. 그런 다음 결과는 그림 9 및 그림 10에서볼 수 있듯이 RPM 변형의 시계열로 플롯됩니다. 이러한 플롯은 적합도 9와같이 RPM을 실제 RPM의 95% 범위 내에서 추정하는 것을 확인합니다.
풍구 결과
풍터널내실험은 표 1에서 시험 행렬에 따라 수행되었다. 복잡성을 줄이기 위해 0yw(사이드슬립) 각도 조건이 항상 유지되었습니다. 이는 카메라와 다른 센서가 선호하는 전방 방향과 함께 장착된 대부분의 비행 프로파일과 일치합니다. 드래그 및 리프트의 변형은 헥사콥터의 다른 피치 각도에 대해 플롯되며 각각 그림 11과 12에표시됩니다. 두 플롯 모두 스로틀 명령을 증가하면 리프트(모터 추력) 힘이 크게 증가한다는 것을 보여줍니다. 마찬가지로, 풍동 속도의 증가는 헥사콥터에 작용하는 드래그 힘이 크게 증가합니다. 이러한 추세는 방정식(7)과 일치합니다.
정적 추력 모델은 동력계 테스트만 필요합니다. 그러나 동적 추력 및 드래그의 정확한 추정을 얻으려면 FT 로드 셀 감지를 위한 풍동 실험이 필요했습니다. 수집된 데이터를 통해 정확한  헥사콥터 FT 모델링을 가능하게 하는 피치 각도 및 프리 스트림 공기 속도의 함수로서 계수를 조회및 드래그할 수 있습니다.
헥사콥터 FT 모델링을 가능하게 하는 피치 각도 및 프리 스트림 공기 속도의 함수로서 계수를 조회및 드래그할 수 있습니다.

그림 1. 참조 세계와 바디 좌표 프레임. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.

그림 2. 멀티 콥터 로드 셀 테스트 스탠드. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.

그림 3. DAQ(풍관 데이터 수집) 시스템 다이어그램. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.

그림 4. 동력계 설정. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.

그림 5. 모터 추력과 RPM 간의 관계. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.

그림 6. 모터 토크와 RPM 의 관계. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
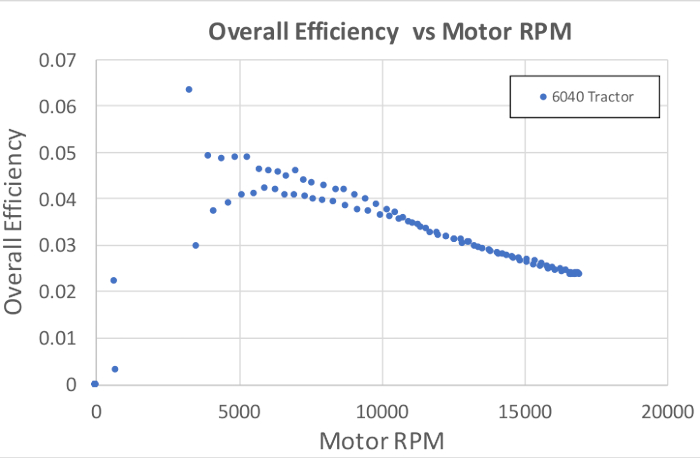
그림 7. 전반적인 모터 효율 대.RPM. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.

그림 8. 표면은 스로틀(PWM), 전력 및 RPM에 맞습니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
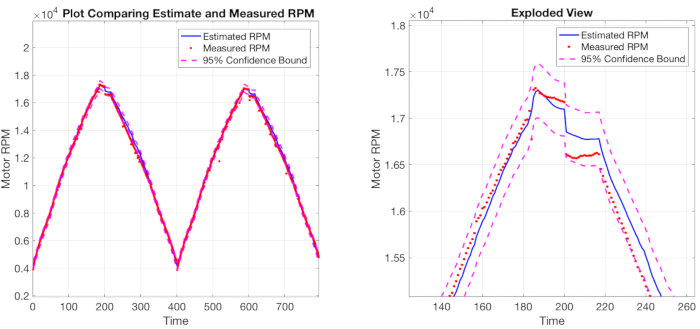
그림 9.  동력계에서 직접 측정된 RPM의 유효성 검사. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
동력계에서 직접 측정된 RPM의 유효성 검사. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
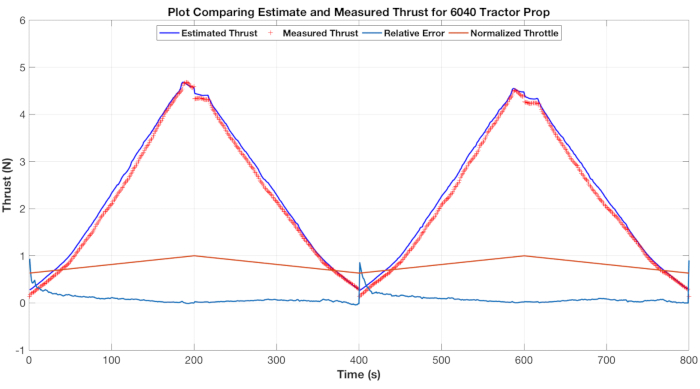
그림 10. 측정된 추력 데이터를 사용하여 예상 추력 데이터의 유효성 검사. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.

그림 11. 5m/s의 일정한 풍속을 감안할 때 다른 피치 각도 및 스로틀 명령에 대한 로드 셀 리프트 및 드래그 포스.

그림 12. 8.47 m/s의 일정한 풍속을 감안할 때 다른 피치 각도 및 스로틀 명령에 대한 로드 셀 리프트 및 드래그 포스는 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
표 1. 풍구 테스트 매트릭스
| 풍차 테스트 매트릭스 | |||
| 풍속(m/s) | 피치 앵글 (°) | 야우 앵글(°) | 스로틀 커맨드(ms) |
| 2.2 | 30 ~ -30 | 0 | 0 과 1300 ~ 1700 |
| 4.5 | 30 ~ -30 | 0 | 0 과 1300 ~ 1700 |
| 6.7 | 30 ~ -30 | 0 | 0 과 1300 ~ 1700 |
| 8.9 | 30 ~ -30 | 0 | 0 과 1300 ~ 1700 |
표 2. 부품 목록
| 헥사콥터부품 목록 | |||||
| Sr 아니오 | 부품 아니오 | 묘사 | Img | 링크 | 수량 |
| 1 | SKU: 571000027-0 | 취미™ 토템 Q450 헥사콥터 키트 |  |
https://hobbyking.com/en_us/hobbykingtm-totem-q450-hexacopter-kit.html | 1 |
| 2 | SKU: 571000064-0 | 오픈 파일럿 CC3D 혁명 (레보) 32비트 F4 기반 비행 컨트롤러 /통합 433Mhz OPLink |  |
https://hobbyking.com/en_us/openpilot-cc3d-revolution-revo-32bit-flight-controller-w-integrated-433mhz-oplink.html | 1 |
| 3 | SKU: 571000065-0 | 오픈 파일럿 OPLink 미니 지상 역 433 MHz |  |
https://hobbyking.com/en_us/openpilot-oplink-mini-ground-station-433-mhz.html | 1 |
| 4 | SKU: 95360000003-0 | 멀티 스타 엘리트 2204-2300KV 3-4s 4 팩 (2/ CCW 2 / CW) |  |
https://hobbyking.com/en_us/multistar-elite-2204-2300kv-set-of-4-cw-ccw-2-ccw-2-cw.html | 2 |
| 5 | SKU: 9192000131-0 | 아프로 20A 무티 로터 ESC (사이먼K 펌웨어) |  |
https://hobbyking.com/en_us/afro-esc-20amp-multi-rotor-motor-speed-controller-simonk-firmware.html | 8 |
| 6 | SKU: T2200.3S.30 | 턴니기 2200mAh 3S 30C 리포 팩 |  |
https://hobbyking.com/en_us/turnigy-2200mah-3s-30c-lipo-pack.html | 1 |
| 7 | SKU: 9171000144 | 취미 킹 옥토콥터 배전 보드 |  |
https://hobbyking.com/en_us/hobby-king-octocopter-power-distribution-board.html | 1 |
| 8 | SKU: 426000022-0 | 킹콩 멀티로터 소품 6x4 CW/CCW |  |
https://hobbyking.com/en_us/kingkong-multirotor-propeller-6x4-cw-ccw-black-20pcs.html | 1 |
| 8 | SKU: 329000304-0 | 젬판 프로펠러 5x3 블랙(CW/CCW) (2pcs) |  |
https://hobbyking.com/en_us/gemfan-propeller-5x3-black-cw-ccw-2pcs.html | 10 |
| 9 | - | AR610 수신기와 스펙트럼 DX6 송신기 시스템 MD2 |  |
https://www.amazon.com/Spektrum-Transmitter-System-AR610-Receiver/dp/B01B9DYOWG/ref=sr_1_2?ie=UTF8&qid=1494000219&sr=8-2&keywords=spektrum+dx6 | 1 |
| 10 | 709-RSP-1600-12 | 스위칭 전원 공급 장치 1500W 12V 125A |  |
https://www.mouser.com/ProductDetail/Mean-Well/RSP-1600-12/?qs=2fha2pyFadujYDPrAgY3T1JlGoR5AZMKL7jhmRyjUc1Z44%252bNekUvbQ%3d%3d | 1 |
| DAQ부품 목록 | |||||
| Sr 아니오 | 부품 아니오 | 묘사 | Img | 링크 | 수량 |
| 1 | ATHM800-256ALP 레브 F | 아테나 II PC /104 SBC |  |
http://www.diamondsystems.com/products/athenaii | 1 |
| 2 | SI-145-5 | 미니 45 포스/토크 센서 |  |
http://www.ati-ia.com/products/ft/ft_models.aspx?id=Mini45 | 1 |
| 3 | - | 취미 파워 에어스피드 센서 MPXV7002DP 차동 압력 |  |
https://www.amazon.com/Hobbypower-Airspeed-MPXV7002DP-Differential-controller/dp/B00WSFWO36/ref=pd_day0_21_2?_encoding=UTF8&pd_rd_i=B00WSFWO36&pd_rd_r=8KRZ03PR2XAJ1HXD4BKS&pd_rd_w=M1tek&pd_rd_wg=LVHjU&psc=1&refRID=8KRZ03PR2XAJ1HXD4BKS | 1 |
| 동력계 부품 목록 | |||||
| Sr 아니오 | 부품 아니오 | 묘사 | Img | 링크 | 수량 |
| 1 | 시리즈-1580 | RC 벤치마크 다이나모계 |  |
https://www.rcbenchmark.com/dynamometer-series-1580/ | 1 |
Application and Summary
여기서는 육사콥터에서 작용하는 공기역학적 힘을 특성화하는 프로토콜을 설명합니다. 이 프로토콜은 다른 멀티로터 구성에 직접 적용할 수 있습니다. 제어 설계를 개선하고 비행 봉투 제한을 이해하고 Xiang13과같이 지역 풍장을 추정하기 위해서는 공기역학적 힘의 적절한 특성화가 필요합니다. 전력 소비 및 스로틀 명령을 기반으로 모터 RPM을 결정하기 위한 제시된 프로토콜은 RPM 감지 없이 저비용 전자 속도 컨트롤러(ESC)가 사용될 때 RPM및 추력을 추정하는 직접 적인 응용 프로그램이 있습니다. 마지막으로, 탄도 추적을 위한 모델 예측 제어와 같은 고급 제어 기술의 적용은 Kamel14에설명된 바와 같이 차량 공기역학 및 추력에 대한 지식이 필요합니다.
Tags
건너뛰기...
이 컬렉션의 비디오:

Now Playing
멀티콥터 공기역학: 헥사콥터 추력 특성화
Aeronautical Engineering
9.2K Views

모형 항공기의 공기 역학적 성능: DC-6B
Aeronautical Engineering
8.3K Views

프로펠러 특성: 성능 관련 피치, 직경 및 블레이드 수의 변화
Aeronautical Engineering
26.5K Views

에어포일 동작: Clark Y-14 날개의 압력 분포
Aeronautical Engineering
21.2K Views

Clark Y-14 날개 성능: 고양력 장치 (플랩 및 슬랫) 적용
Aeronautical Engineering
13.5K Views

난류 구체 방식: 풍동 흐름 품질 평가
Aeronautical Engineering
8.7K Views

교차 원통형 흐름: 압력 분포 측정 및 항력 계수 추정
Aeronautical Engineering
16.3K Views

노즐 분석: 수렴 및 수렴 전달 노즐에 따른 마하수 및 압력의 변화
Aeronautical Engineering
38.0K Views

슐리렌 이미징: 초음속 흐름 특징을 시각화하는 기술
Aeronautical Engineering
11.8K Views

회류 수조 흐름 시각화: 델타 날개 위 첨단 소용돌이 관찰
Aeronautical Engineering
8.2K Views

표면 염료 흐름 시각화: 초음속 흐름 내 흐름맥 패턴을 관찰하는 정성적 방법
Aeronautical Engineering
4.9K Views

피트 정압관: 풍량 측정 장치
Aeronautical Engineering
49.3K Views

항온 풍속 측정: 난류 경계층 흐름 연구 도구
Aeronautical Engineering
7.3K Views

압력 변환기: 피트 정압관을 사용한 보정
Aeronautical Engineering
8.5K Views

실시간 비행 제어: 임베디드 센서 교정 및 데이터 수집
Aeronautical Engineering
10.3K Views
Copyright © 2025 MyJoVE Corporation. 판권 소유