
Multicopter-Aerodynamik: Charakterisierung der Schubkraft bei einem Hexacopter
Überblick
Quelle: Prashin Sharma und Ella M. Atkins, Department of Aerospace Engineering, University of Michigan, Ann Arbor, MI
Multicopter werden immer beliebter für eine Vielzahl von Hobby- und kommerziellen Anwendungen. Sie sind allgemein als Quadcopter (vier Schubdüsen), Hexacopter (sechs Schubdüsen) und Octocopter (acht Triebwerke) Konfigurationen erhältlich. Hier beschreiben wir einen experimentellen Prozess, um die Multicopter-Leistung zu charakterisieren. Getestet wird eine modulare kleine Hexacopter-Plattform mit Redundanz der Antriebseinheit. Der individuelle statische Motorschub wird mit einem Dynamometer und unterschiedlichen Propeller- und Eingangsbefehlen bestimmt. Dieser statische Schub wird dann als Funktion der Motordrehzahl dargestellt, wo die Drehzahl durch Motorleistung und Steuereingang bestimmt wird. Der Hexacopter wird dann auf einem Wägezellen-Prüfstand in einem 5' x 7' Low-Speed-Umlauf-Windkanal montiert, und seine aerodynamischen Hebe- und Zugkraftkomponenten wurden während des Fluges mit unterschiedlichen Motorsignalen, Freistrom-Durchflussgeschwindigkeit und Angriffswinkel charakterisiert.
Ein Hexacopter wurde für diese Studie ausgewählt, weil er gegen Motorversagen (Antriebseinheit) belastbar ist, wie in Clothier1berichtet. Neben der Redundanz im Antriebssystem ist die Auswahl hochzuverlässiger Komponenten auch für einen sicheren Flug erforderlich, insbesondere für Missionen überbevölkerter Regionen. In Ampatis2diskutieren die Autoren die optimale Auswahl von Multicopter-Teilen wie Motoren, Schaufeln, Batterien und elektronischen Drehzahlreglern. Ähnliche Forschung wurde auch in Bershadsky3berichtet, die sich auf die richtige Auswahl eines Propellersystems konzentriert, um Missionsanforderungen zu erfüllen. Neben Redundanz und Zuverlässigkeit der Komponenten ist es auch wichtig, die Fahrzeugleistung zu verstehen, um sicherzustellen, dass die Grenzwerte für Flugumschläge eingehalten werden und um das effizienteste Design auszuwählen.
Grundsätze
Ein Multicopter ist ein Luftfahrzeug, das mehrere Rotoren im Vergleich zu herkömmlichen Hubschraubern hat, die einen einzigen Hauptrotor haben. Ein herkömmlicher Hubschrauberrotor hat eine variable Steigung, die es dem Piloten ermöglicht, Lift und Lenkung zu steuern. Im Gegensatz dazu setzen Multicopter auf Festnetzrotoren und nutzen Beider in der Motordrehzahl für die Fahrzeugsteuerung.
Es sind verschiedene Multicopter-Konfigurationen entstanden, wie Quadrocopter mit vier Rotoren, Hexacopter mit sechs Rotoren und Oktocopter mit acht Rotoren. Normalerweise haben Multicopter eine gleiche Anzahl von im Uhrzeigersinn (CW) und gegen den Uhrzeigersinn (CCW) festen Pitch Propeller, und Schwankungen in der Geschwindigkeit der Rotoren führen zu den folgenden Drehungen in 3D während des Fluges:
- Yaw – Drehung um die vertikale Achse, was zu einer Änderung des Richtungswinkels führt
- Rolle – Drehung um die Achse, die nach vorne zeigt, was zu einer Seiten- zur Seitenbewegung führt
- Tonhöhe – Drehung um die Achse, die von links nach rechts verläuft, was zu einer Vorwärts- und Rückwärtsneigungsbewegung führt
Multicopter, einschließlich Hexacopter, können gesteuert werden, um einen stabilen Flug in Bezug auf die folgenden Freiheitsgrade zu halten:
- Hover – Alle Propeller werden mit ungefähr der gleichen Geschwindigkeit betrieben und erzeugen daher ungefähr den gleichen Schub. Da alle Propeller vom Schwerpunkt aus gleichmäßig verteilt sind, erzeugt der Schub der Propeller kein Nettodrehmoment am Flugzeug. Zusätzlich verwendet der Hexacopter drei rotierende Propeller im Uhrzeigersinn (CW) und drei gegen den Uhrzeigersinn (CCW) rotierende Propeller, so dass das Propellerdrehmoment bei gleicher Geschwindigkeit aufgehoben wird. Im Schwebezustand gleicht der gesamte Aufwärtsschub die Gravitationskraft nach unten aus, und der Multicopter behält Null-Pitch- und Rollwinkel bei Nullwind (Luftwiderstand) bei.
- Roll Control – Ein Hexacopter kann über seine Walzenachse gesteuert werden, indem die Geschwindigkeit der Propeller auf der einen Seite erhöht und die Geschwindigkeit der Propeller auf der anderen Seite verringert wird. Wenn die Schuberhöhung auf einer Seite die gleiche ist wie die Schubabnahme auf der gegenüberliegenden Seite, bleibt der Nettoschub gleich. Ebenso bleibt der Nettoeffekt des Drehmoments gleich.
- Pitch Control – Für einen Hexacopter ist die Pitch-Steuerung analog zur Rollensteuerung. Das Schubdifferenzial zwischen vorderen und hinteren Propellern bewirkt, dass der Hexacopter aufschlägt; Wenn der Schub in den hinteren Propellern erhöht und in den vorderen Propellern verringert wird, schlägt der Hexacopter nach vorne.
- Yaw Control – Yaw-Steuerung wird durch den Ausgleich der Drehungsmomente des Propellers im Uhrzeigersinn mit den gegen den Uhrzeigersinn gerichteten Propeller-Drehmomenten erreicht. Durch das Drehen der gegen den Uhrzeigersinn gerichteten Propeller schneller als die Propeller im Uhrzeigersinn (oder umgekehrt) löst die entgegengesetzte Netzreaktion auf dem Hexacopter eine Rotation im Gähnen aus.
Eine weitere Zusammenfassung der Hexacopter-Physik wird unten beschrieben.
Motorparameter
Ein verklumptes Parametermodell nach Bangura4 wird verwendet, um den Schub und das Drehmoment jeder Motor-/Propellerstrahlereinheit anzugeben:
 (1)
(1)
 (2)
(2)
wobei  der Schub
der Schub  erzeugt wird,
erzeugt wird,  ist das Motordrehmoment, ist der
ist das Motordrehmoment, ist der 
 Schubkoeffizient, ist der Momentkoeffizient und ist die motorische Drehzahl in Drehzahl (Umdrehungen pro Minute). Motorleistung und -effizienz lassen sich aus folgenden Gleichungen berechnen:
Schubkoeffizient, ist der Momentkoeffizient und ist die motorische Drehzahl in Drehzahl (Umdrehungen pro Minute). Motorleistung und -effizienz lassen sich aus folgenden Gleichungen berechnen:
 (3)
(3)
 (4)
(4)
 (5)
(5)
wo  ist die mechanische
ist die mechanische  Leistung erzeugt, ist
Leistung erzeugt, ist  die
die  elektrische
elektrische  Leistung Eingang bei Spannung und Strom, und ist der Motor Effizienz.
Leistung Eingang bei Spannung und Strom, und ist der Motor Effizienz.  werden experimentell anhand der Daten aus Dynamometerexperimenten ermittelt.
werden experimentell anhand der Daten aus Dynamometerexperimenten ermittelt.
Hexacopter Dynamics
Die Dynamik eines Hexacopters, wie in Ducard5 und Powers6beschrieben, basiert auf den in Abbildung 1dargestellten Referenzrahmen, wobei die orthonormale Achse, dargestellt durch  einen Weltkoordinatenrahmen mit Ursprung an
einen Weltkoordinatenrahmen mit Ursprung an  der . Der Weltkoordinatenrahmen ist ein fester Rahmen mit allen anderen Rahmen, die in Bezug darauf definiert sind, was es bequem macht, die Übersetzungs- und Rotationskinematik eines Hexacopters auszudrücken. Der Körperkoordinatenrahmen,
der . Der Weltkoordinatenrahmen ist ein fester Rahmen mit allen anderen Rahmen, die in Bezug darauf definiert sind, was es bequem macht, die Übersetzungs- und Rotationskinematik eines Hexacopters auszudrücken. Der Körperkoordinatenrahmen,  der
der  mit Ursprung angegeben wird, befindet sich im Schwerpunkt (CG) für den Hexacopter und ist in Bezug auf den Weltrahmen definiert; Körperrahmenachsen sind am Hexacopter befestigt. Der Körperkoordinatenrahmen wird verwendet, um die Schubrichtung zu definieren, die vom Hexacopter erzeugt wird. Üblicherweise wird bei Luftfahrzeugen auch ein Windrahmen mit seiner Herkunft am Fahrzeug CG definiert. Der Windrahmen wird verwendet, um die aerodynamischen Kräfte und Momente auszudrücken, die auf den Hexacopter wirken. Für die Zwecke dieses Experiments betrachten wir jedoch den Weltrahmen und den Windrahmen als identisch, da der Fluss im Windkanal immer horizontal ist; Weitere Informationen zu Flugzeugreferenzrahmen finden Sie unter McClamroch7.
mit Ursprung angegeben wird, befindet sich im Schwerpunkt (CG) für den Hexacopter und ist in Bezug auf den Weltrahmen definiert; Körperrahmenachsen sind am Hexacopter befestigt. Der Körperkoordinatenrahmen wird verwendet, um die Schubrichtung zu definieren, die vom Hexacopter erzeugt wird. Üblicherweise wird bei Luftfahrzeugen auch ein Windrahmen mit seiner Herkunft am Fahrzeug CG definiert. Der Windrahmen wird verwendet, um die aerodynamischen Kräfte und Momente auszudrücken, die auf den Hexacopter wirken. Für die Zwecke dieses Experiments betrachten wir jedoch den Weltrahmen und den Windrahmen als identisch, da der Fluss im Windkanal immer horizontal ist; Weitere Informationen zu Flugzeugreferenzrahmen finden Sie unter McClamroch7.
Zunächst eine Einführung in die Notation. L ist die Armlänge von jedem Hexacopter-Motor bis zum Fahrzeugschwerpunkt in der horizontalen Körperebene, und die Gesamtmotorschubgröße wird durch den Körperrahmen z-Richtung angegeben und wirkt. Die Drehmomentgröße  wird durch ein Subskript angegeben, das die Körperrahmen-Referenzachse darstellt.
wird durch ein Subskript angegeben, das die Körperrahmen-Referenzachse darstellt.  ,
, 
 und stellen die Hexacopter-Drag-Koeffizienten entlang jeder jeweiligen
und stellen die Hexacopter-Drag-Koeffizienten entlang jeder jeweiligen  Wind- oder äquivalenten Weltrahmenachse dar, ist die Masse des Hexacopters und
Wind- oder äquivalenten Weltrahmenachse dar, ist die Masse des Hexacopters und  ist Gravitationsbeschleunigung. Die Gesamtschubkraft und die Drehmomente in Bezug auf die Drehzahlwerte des Motors werden angegeben durch:
ist Gravitationsbeschleunigung. Die Gesamtschubkraft und die Drehmomente in Bezug auf die Drehzahlwerte des Motors werden angegeben durch:
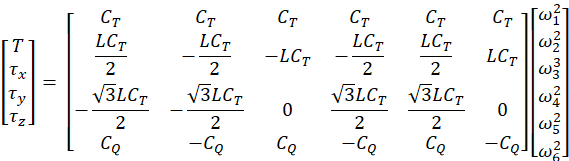 (6)
(6)
Newtons Gleichungen der linearen Bewegung im Weltrahmen können dann wie folgt definiert werden:
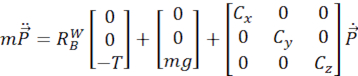 (7)
(7)
Die  Rotationsmatrix wird durch die Z-X-Y Euler Winkelrotation definiert:
Rotationsmatrix wird durch die Z-X-Y Euler Winkelrotation definiert:
 (8)
(8)
wobei der Gähnwinkel ( ) um die Z-Achse
( ) um die Z-Achse gedreht wird, der Rollwinkel ( )
gedreht wird, der Rollwinkel ( ) Drehung um die X-Achse ist,
Drehung um die X-Achse ist,  der Steigungswinkel ( ) Drehung um die Y-Achse und die Kurznotation für jeden Winkel ist.
der Steigungswinkel ( ) Drehung um die Y-Achse und die Kurznotation für jeden Winkel ist.
In diesen Experimenten geht es nur um aerodynamische Kräfte, die in linearer Bewegung auf den Hexacopter wirken, aber zur Vollständigkeit des Verständnisses der Dynamik des Hexacopters werden unten die Haltungsgleichungen der Bewegung definiert. Zunächst ist p definiert als Winkelgeschwindigkeit um die X-Achsedes Körpers, q ist die Winkelgeschwindigkeit um die Y-Achsedes Körpers und r die Winkelgeschwindigkeit um die Z-Achsedes Körpers.
 (9)
(9)
 ist die Aufwärtskraft, die von Schuber i angewendet wird, und ich bin das Hexacopter-Moment der Trägheitsmatrix, das mit einem bifilaren Pendel bestimmt werden kann. Weitere Informationen zu diesem Verfahren erhalten Sie bei Quan8. Körper und Weltrahmen Winkelgeschwindigkeiten sind verwandt durch:
ist die Aufwärtskraft, die von Schuber i angewendet wird, und ich bin das Hexacopter-Moment der Trägheitsmatrix, das mit einem bifilaren Pendel bestimmt werden kann. Weitere Informationen zu diesem Verfahren erhalten Sie bei Quan8. Körper und Weltrahmen Winkelgeschwindigkeiten sind verwandt durch:
 (10)
(10)
Verfahren
Dieses Protokoll charakterisiert Hexacopter Schub und Aerodynamik. Für dieses Experiment haben wir handelsübliche, handelsübliche Komponenten für den Hexacopter verwendet, und die Details sind in Tabelle 2 aufgeführt. Für den Flugcontroller haben wir einen Open-Source-Autopiloten, Librepilot,9 ausgewählt, da er die Flexibilität bietet, einzelne Motorbefehle zu steuern, die an den Hexacopter ausgegeben werden.
Der Prüfstand für die Montage der Wägezelle und des Hexacopters wurde im eigenen Haus aus laminiertem Sperrholz gefertigt und ist in Abbildung 2dargestellt. Beachten Sie bei der Konstruktion des Prüfstandes, dass er eine genaue Einstellung des Angriffswinkels des Multikopters ermöglichen muss und ausreichend starr sein muss, um Biegekräften und Vibrationen standzuhalten, die beim Betrieb der Motoren entstehen.
Eine 6-Achsen-Wägezelle ist auf dem Prüfstand montiert und mit der Datenerfassungsplatine verbunden, wie in Abbildung 3dargestellt. Aerodynamik und Schubkräfte werden im Körperrahmen des Hexacopters durch die Wägezelle erfasst. Dehnungsmessstreifendaten passieren eine Signalbedingung. Die Datenerfassungsplatine (DAQ) erfasst dann die analogen Kraft- und Drehmomentkomponenten nach einem Kalibrierverfahren des Wägezellenherstellers. Das DAQ-Board speichert diese Werte dann in einem Hochgeschwindigkeitspuffer und später auf permanenter Festplatte.
Bestimmen Sie für dieses Protokoll zunächst die von den einzelnen Motoren erzeugten Kräfte. Bestimmen Sie dann die Kräfte, die auf die nackte Flugzeugzelle wirken, gefolgt von der Bestimmung der Kräfte, die vom gesamten Hexacopter als Funktion von Motor-RPM-Befehlen erzeugt werden. Geben Sie für jeden Test dieselben RPM-Befehle an alle Motoren aus.
1. Dynamometer-Experiment
Der Dynamometer ermöglicht die direkte Messung von Parametern wie Schub, Drehmoment, Drehzahl, Batteriespannung und Strom. Parameter wie elektrische Leistung, mechanische Leistung und Motoreffizienz können dann aus Gleichungen (3), (4) und (5) abgeleitet werden.
- Schließen Sie das Dynamometer über einen USB-Anschluss an den Datenerfassungscomputer an.
- Führen Sie die mit dem Dynamometer gelieferte grafische Benutzeroberfläche (GUI) aus.
- Kalibrieren Sie den Prüfstand, indem Sie die Anweisungen auf dem Bildschirm befolgen. Verwenden Sie Gewichte und einen bekannten Hebelarm, wenn Sie dazu aufgefordert werden.
- Montieren Sie den Motor am Prüfstand des Dynamometers.
- Befestigen Sie den Propeller in einer Puller-Konfiguration (Traktor), wie in Abbildung 4dargestellt.
- Schließen Sie die Batterie an den Prüfstand an.
- Sichern Sie den Dynamometer mit C-Klemmen fest an der Werkbank.
- Führen Sie das Schritteingangsprogramm aus und zeichnen Sie die gemessenen Parameter auf, einschließlich Schub, Drehmoment, Motordrehzahl, Motorstrom und Pulsweitenmodulation (PWM) "Drossel" Befehl.
2. Statischer Schubtest
- Befestigen Sie den Hexacopter am Prüfstand der Wägezelle mit Befestigungsschrauben.
- Öffnen Sie das Datenerfassungssystem (Data Acquisition System, DAQ), und führen Sie das Lastzellen-Dehnungsmessstreifen-Bias-Programm aus.
- Schließen Sie den Hexacopter-Flugcontroller über ein Micro-USB-Kabel mit dem Computer an und öffnen Sie die GCS-Software (Ground Controller Station).
- Schließen Sie das Netzteil an den Hexacopter an.
- Wählen Sie die Registerkarte Konfiguration -> Ausgabe in GCS. Verknüpfen Sie alle Motoren, und überprüfen Sie die Live-Tests der Ausgänge.
- Stellen Sie den gewünschten Drosselbefehl auf 1300 ms. Stellen Sie sicher, dass Sie alle Motoren mit dem gleichen Befehl (PWM) bedienen können.
- Lassen Sie das System für einige Sekunden stabilisieren, und führen Sie dann das Datenerfassungsprogramm aus, um Daten aus der Wägezelle zu sammeln.
- Nachdem die Datenerfassung abgeschlossen ist, stoppen Sie die Motoren.
- Wiederholen Sie die Schritte 3. 6 bis 3.8 für Drosselbefehle 1500 ms und 1700 ms.
- Übertragen Sie die im Datenerfassungssystem gespeicherten Daten auf einen Datenverarbeitungscomputer und langzeitgespeichert.
3. Dynamischer Schubtest
Führen Sie eine Reihe von Windkanaltests durch, um die linearen aerodynamischen Kräfte des Hexacopters, in erster Linie Heben und Ziehen, über eine Vielzahl von Fluggeschwindigkeiten und Einfallswinkeln zu charakterisieren und zu analysieren. Bei den Windkanalexperimenten wird davon ausgegangen, dass sich der Hexacopter in stabilen Flugbedingungen befindet. Daher ist die Größe des Hexacopter-Geschwindigkeitsvektors die gleiche wie die Fluggeschwindigkeit und wird im Weltrahmen horizontal angenommen. Hebe- und Schleppkräfte sind in erster Linie auf den Luftstrom um den Hexacopter zurückzuführen. Beachten Sie, dass Hub- und Zugkräfte angenommen werden, um den gesamten Auftrieb und den Gesamtwiderstand auf Hexacopter zu charakterisieren; Seitenkräfte vernachlässigbar sind.
Das experimentelle Verfahren, das in diesem Experiment durchgeführt wird, ähnelt dem in Foster10 und Russell11. Während der Windkanalprüfung wurde der Hexacopter von einem Stromwandler angetrieben, der an die Gebäudeleistung (AC) angeschlossen war, um während aller Tests konsistente Leistungs- und Spannungspegel zu gewährleisten. Beachten Sie, dass Motoren mit hohen Drehzahlen einen nennenswerten Strom verbrauchen können. Verwenden Sie niedrige Spurweite und kurze Länge Draht, um spürbaren Spannungsabfall über den Draht während des Betriebs zu verhindern.
- Montieren Sie den Hexacopter auf dem Wägezellen-Prüfstand
- Schließen Sie die Wägezelle mit dem Datenerfassungscomputer an, und verbinden Sie den Hexacopter mit dem GCS, indem Sie das für den statischen Schubtest beschriebene Verfahren verwenden.
- Sichern Sie den Prüfstand mit C-Klemmen an der Basis des Windkanals.
- Stellen Sie sicher, dass der Multicopter gut frei von Windkanalwänden, Boden und Decke ist, um Störungen und Reflexionen durch den freien Durchfluss zu minimieren.
- Montieren Sie Pitotröhren einige Meter vom Hexacopter entfernt, um ungestörten Luftstrom zu testen. Schließen Sie die Pitot-Drucksensoren an das DaQ-System an.
- Stellen Sie den Steigungswinkel für den Hexacopter auf 0° ein, indem Sie das Scharniergelenk des Prüfstandes einstellen. Im Windkanal sind Hexacopter-Pitchwinkel und Angriffswinkel identisch.
- Führen Sie das Bias-Programm aus, um Spannungsverzerrungen für Lastzellen zu ermitteln.
- Initialisieren Sie den Windkanal auf eine Windgeschwindigkeit von 2,2 m/s.
- Sobald sich die freie Strömungsgeschwindigkeit auf den gewünschten Wert absetzt, erfassen Sie Basis-FT-Werte aus der Wägezelle mit Hexacopter-Motoren aus.
- Initialisieren Sie den Befehl Drosselklappe auf 1300 ms, lassen Sie die Fluggeschwindigkeit im Windkanal absetzen, bevor Sie FT- und Pitot-Daten sammeln.
- Wiederholen Sie die Schritte 3.7 - 3.9 für Drosselbefehle von 1500 ms und 1700 ms.
- Wiederholen Sie die Schritte 3.5 - 3.10 für verschiedene Hexacopter-Pitch-Winkel und Windkanal-Luftgeschwindigkeitswerte, wie in Tabelle 1 angegeben.
Ergebnisse
Dynamometer-Tests
In den Abbildungen 5-6veranschaulichen die Diagramme die Variation von Schub bzw. Drehmoment mit zunehmender Motordrehzahl. Aus diesen Parzellen kann die minimale Motordrehzahl bestimmt werden, die für den Schweben des Multikopters erforderlich ist. Ein Diagramm mit Daten von mehreren Propellern kann von Sharma12bezogen werden. Weiterhin können die quadratischen Beziehungen zwischen Schub vs. RPM und Moment vs. RPM deutlich beobachtet werden, die in gleichungsgemäß (1) und (2) beschrieben sind. Anhand dieser quadratischen Beziehung können wir  dann die Und-Koeffizienten für den 6040 Propeller bestimmen, die wie folgt sind:
dann die Und-Koeffizienten für den 6040 Propeller bestimmen, die wie folgt sind:

Abbildung 7 zeigt, dass eine Erhöhung der Drehzahl, die einer Erhöhung des Stromverbrauchs entspricht, zu einer verringerten Motoreffizienz führt. Ähnliche Experimente können für verschiedene Propeller durchgeführt werden, um die Motoreffizienz für das Motor-Propeller-Paar zu erreichen. Die Ergebnisse solcher Experimente sind nützlich bei der Fahrzeugkonstruktion, um das optimale Motor-Propeller-Paar zu bestimmen, das auf dem Multicopter verwendet werden soll. Diese Entscheidungen basieren auf den gewünschten Missionsparametern, wie z. B. Dauer und Geschwindigkeit des Fluges.
Da es keine direkte RPM-Sensorrückmeldung auf den kostengünstigen Hexacopter gibt, schätzen wir RPM, indem wir eine Oberfläche über Drehzahl,elektrische Leistung und Gas (PWM) Einbau verwenden. Diese Oberflächenanpassung wird verwendet, um RPM als Funktion der elektrischen Leistung und des PWM-Wertes zu schätzen. Basierend auf den daten aus dem Dynamometer wird die Oberflächenanpassung in Abbildung 8dargestellt, mit der entsprechenden Gleichung:



wobei  die Motor-PWM-Einstellung (Drosselklappe) durch den
die Motor-PWM-Einstellung (Drosselklappe) durch den  mittleren Bias-Wert 1550
mittleren Bias-Wert 1550  mit einer Standardabweichung von 201,9 normalisiert wird, während sie durch Vorspannung 71,11 W mit einer Standardabweichung von 55,75 W normalisiert wird.
mit einer Standardabweichung von 201,9 normalisiert wird, während sie durch Vorspannung 71,11 W mit einer Standardabweichung von 55,75 W normalisiert wird.
Nach der Analyse der Dynamometerdaten wurde ein zweites Dataset zur  Validierung gesammelt und als Eingabe für die Funktion bereitgestellt. Die Ergebnisse werden dann in einer Zeitreihe von Drehzahlenvariationen dargestellt, wie in Abbildung 9 und Abbildung 10dargestellt. Diese Diagramme bestätigen, dass die Anpassung s/min auf 95 % der tatsächlichen Drehzahl schätzt, wie in Abbildung 9dargestellt.
Validierung gesammelt und als Eingabe für die Funktion bereitgestellt. Die Ergebnisse werden dann in einer Zeitreihe von Drehzahlenvariationen dargestellt, wie in Abbildung 9 und Abbildung 10dargestellt. Diese Diagramme bestätigen, dass die Anpassung s/min auf 95 % der tatsächlichen Drehzahl schätzt, wie in Abbildung 9dargestellt.
Windkanal-Ergebnisse
Die Experimente im Windkanal wurden nach der Testmatrix in Tabelle 1 durchgeführt. Um die Komplexität zu reduzieren, wurde jederzeit eine Null-Gähnen-Winkelbedingung (Sideslip) beibehalten. Dies entspricht den meisten Flugprofilen, in denen Kameras und andere Sensoren mit bevorzugter Nachvorneausrichtung montiert sind. Die Variation von Luftwiderstand und Hebehub wird gegen unterschiedliche Steigungswinkel des Hexacopters dargestellt und in den Abbildungen 11 bzw. 12dargestellt. Beide Diagramme zeigen, dass die Erhöhung des Drosselbefehls zu einer signifikanten Erhöhung der Hubkraft (Motorschub) führt. In ähnlicher Weise führt eine Erhöhung der Windkanalgeschwindigkeit zu einer signifikanten Erhöhung der Widerstandskraft, die auf Hexacopter wirkt. Diese Trends stimmen mit Gleichung (7) überein.
Für ein statisches Schubmodell ist nur eine Dynamometerprüfung erforderlich. Um jedoch eine genaue Schätzung des dynamischen Schubs und Desziehens zu erhalten, waren Windkanalexperimente mit FT-Wägezellenmessung erforderlich. Mit gesammelten Daten können wir eine Nachlauftabelle von und Drag-Koeffizienten entwickeln, als Funktion des Steigungswinkels und der freien Stream-Luftgeschwindigkeit, um eine genaue Hexacopter FT-Modellierung zu ermöglichen.
Drag-Koeffizienten entwickeln, als Funktion des Steigungswinkels und der freien Stream-Luftgeschwindigkeit, um eine genaue Hexacopter FT-Modellierung zu ermöglichen.

Abbildung 1. Referenzwelt und Körperkoordinatenrahmen. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.

Abbildung 2. Multicopter-Wägezellen-Prüfstand. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.

Abbildung 3. Systemdiagramm zur Datenerfassung (DAQ) für Windkanaldaten. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.

Abbildung 4. Dynamometer-Setup. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.

Abbildung 5. Beziehung zwischen Motorschub und Drehzahl. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.

Abbildung 6. Verhältnis zwischen Motordrehmoment und Drehzahl. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
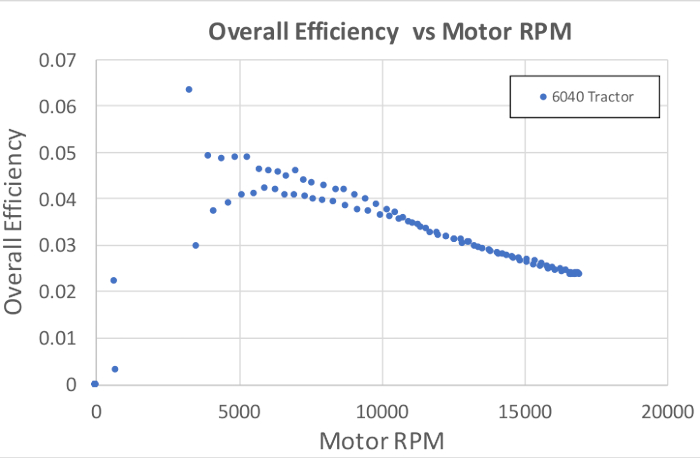
Abbildung 7. Gesamtmotoreffizienz im Vergleich zu Drehzahl. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.

Abbildung 8. Oberfläche passen über Gas (PWM), elektrische Leistung und Drehzahl. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
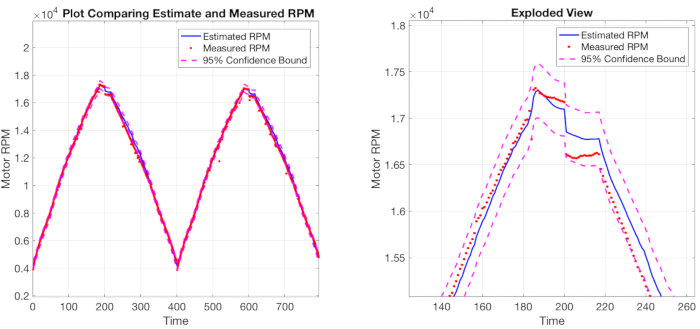
Abbildung 9. Validierung  mit Drehzahl direkt vom Dynamometer aus gemessen. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
mit Drehzahl direkt vom Dynamometer aus gemessen. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
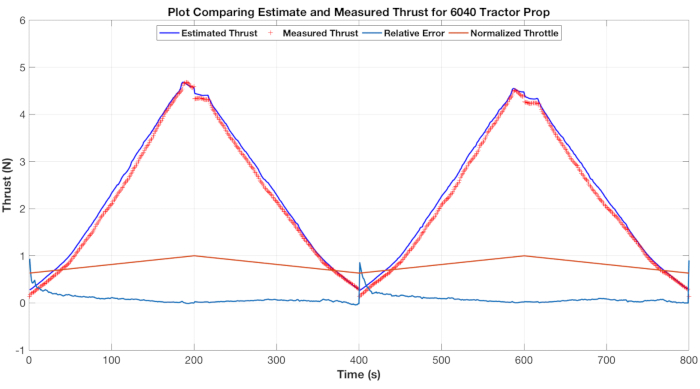
Abbildung 10. Validierung der geschätzten Schubdaten mit gemessenen Schubdaten. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.

Abbildung 11. Lastzellenheber und Ziehkräfte für verschiedene Steigungswinkel und Drosselbefehle bei konstanter Windgeschwindigkeit von 5 m/s. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.

Abbildung 12. Lastzellenheber und Zugkräfte für verschiedene Steigungswinkel und Drosselbefehle bei konstanter Windgeschwindigkeit von 8,47 m/s. Bitte klicken Sie hier, um eine größere Version dieser Abbildung anzuzeigen.
Tabelle 1. Windkanal-Testmatrix
| Windkanal-Testmatrix | |||
| Windgeschwindigkeit (m/s) | Stellplatzwinkel (°) | Yaw Winkel(°) | Drosselbefehl (ms) |
| 2.2 | 30 bis -30 | 0 | 0 und 1300 bis 1700 |
| 4.5 | 30 bis -30 | 0 | 0 und 1300 bis 1700 |
| 6.7 | 30 bis -30 | 0 | 0 und 1300 bis 1700 |
| 8.9 | 30 bis -30 | 0 | 0 und 1300 bis 1700 |
Tabelle 2. Teileliste
| Teileliste für Hexacopter | |||||
| Sr Nein | Teil Nr. | beschreibung | Img | verbinden | Qty |
| 1 | Artikelnummer: 571000027-0 | HobbyKing™ Totem Q450 Hexacopter Kit |  |
https://hobbyking.com/en_us/hobbykingtm-totem-q450-hexacopter-kit.html | 1 |
| 2 | Artikelnummer: 571000064-0 | OpenPilot CC3D Revolution (Revo) 32bit F4 Basierter Flugcontroller mit integriertem 433Mhz OPLink |  |
https://hobbyking.com/en_us/openpilot-cc3d-revolution-revo-32bit-flight-controller-w-integrated-433mhz-oplink.html | 1 |
| 3 | Artikelnummer: 571000065-0 | Openpilot OPLink Mini Ground Station 433 MHz |  |
https://hobbyking.com/en_us/openpilot-oplink-mini-ground-station-433-mhz.html | 1 |
| 4 | Artikelnummer: 9536000003-0 | Multistar Elite 2204-2300KV 3-4s 4er Pack (2/CCW 2/CW) |  |
https://hobbyking.com/en_us/multistar-elite-2204-2300kv-set-of-4-cw-ccw-2-ccw-2-cw.html | 2 |
| 5 | Artikelnummer: 9192000131-0 | Afro 20A Muti-Rotor ESC (SimonK Firmware) |  |
https://hobbyking.com/en_us/afro-esc-20amp-multi-rotor-motor-speed-controller-simonk-firmware.html | 8 |
| 6 | Artikelnummer: T2200.3S.30 | Turnigy 2200mAh 3S 30C Lipo Pack |  |
https://hobbyking.com/en_us/turnigy-2200mah-3s-30c-lipo-pack.html | 1 |
| 7 | Artikelnummer: 9171000144 | Hobby King Octocopter Power Distribution Board |  |
https://hobbyking.com/en_us/hobby-king-octocopter-power-distribution-board.html | 1 |
| 8 | Artikelnummer: 426000022-0 | King KongMultirotor Prop 6x4 CW/CCW |  |
https://hobbyking.com/en_us/kingkong-multirotor-propeller-6x4-cw-ccw-black-20pcs.html | 1 |
| 8 | Artikelnummer: 329000304-0 | Gemfan Propeller 5x3 Schwarz (CW/CCW) (2Stk.) |  |
https://hobbyking.com/en_us/gemfan-propeller-5x3-black-cw-ccw-2pcs.html | 10 |
| 9 | - | Spektrum DX6 Sendersystem MD2 mit AR610 Empfänger |  |
https://www.amazon.com/Spektrum-Transmitter-System-AR610-Receiver/dp/B01B9DYOWG/ref=sr_1_2?ie=UTF8&qid=1494000219&sr=8-2&keywords=spektrum+dx6 | 1 |
| 10 | 709-RSP-1600-12 | Schaltnetzteile 1500W 12V 125A |  |
https://www.mouser.com/ProductDetail/Mean-Well/RSP-1600-12/?qs=%2fha2pyFadujYDPrAgY3T1JlGoR5AZMKL7jhmRydJUc1Z44%252bNekUvbQ%3d%3d | 1 |
| Teileliste für DAQ | |||||
| Sr Nein | Teil Nr. | beschreibung | Img | verbinden | Qty |
| 1 | ATHM800-256ALP Rev F | Athena II PC /104 SBC |  |
http://www.diamondsystems.com/products/athenaii | 1 |
| 2 | SI-145-5 | Mini 45 Kraft/Torque Sensor |  |
http://www.ati-ia.com/products/ft/ft_models.aspx?id=Mini45 | 1 |
| 3 | - | Hobbypower Airspeed Sensor MPXV7002DP Differenzdruck |  |
https://www.amazon.com/Hobbypower-Airspeed-MPXV7002DP-Differential-controller/dp/B00WSFWO36/ref=pd_day0_21_2?_encoding=UTF8&pd_rd_i=B00WSFWO36&pd_rd_r=8KRZ03PR2XAJ1HXD4BKS&pd_rd_w=M1tek&pd_rd_wg=LVHjU&psc= 1&refRID=8KRZ03PR2XAJ1HXD4BKS | 1 |
| Teileliste für Dynamometer | |||||
| Sr Nein | Teil Nr. | beschreibung | Img | verbinden | Qty |
| 1 | Baureihe-1580 | RC Benchmark Dynamometer |  |
https://www.rcbenchmark.com/dynamometer-series-1580/ | 1 |
Anwendung und Zusammenfassung
Hier beschreiben wir ein Protokoll, um die aerodynamischen Kräfte zu charakterisieren, die auf einen Hexacopter wirken. Dieses Protokoll kann direkt auf andere Multirotor-Konfigurationen angewendet werden. Die richtige Charakterisierung der aerodynamischen Kräfte ist erforderlich, um das Steuerungsdesign zu verbessern, die Grenzwerte für Flughüllen zu verstehen und lokale Windfelder wie in Xiang13zu schätzen. Das vorgestellte Protokoll zur Bestimmung der Motordrehzahl basierend auf Demach und Drosselbefehl verfügt über direkte Anwendungen zur Schätzung von Drehzahl und Schub, wenn kostengünstige elektronische Drehzahlregler (ESCs) ohne Drehzahlerfassung verwendet werden. Schließlich erfordert die Anwendung fortschrittlicher Steuerungstechniken, wie z. B. bei der Modellvorhersagesteuerung für die Flugbahnverfolgung, Kenntnisse der Flugzeugaerodynamik und Schubkräfte, wie in Kamel14beschrieben.
pringen zu...
Videos aus dieser Sammlung:

Now Playing
Multicopter-Aerodynamik: Charakterisierung der Schubkraft bei einem Hexacopter
Aeronautical Engineering
9.2K Ansichten

Aerodynamisches Verhalten eines Modellflugzeugs: Die DC-6B
Aeronautical Engineering
8.3K Ansichten

Charakterisierung von Propellern: Variationen von Pitch, Durchmesser und Blattzahl, und deren Einfluss auf die Leistung
Aeronautical Engineering
26.5K Ansichten

Verhalten der Tragflächen: Druckverteilung über einem Clark Y-14-Flügel
Aeronautical Engineering
21.2K Ansichten

Clark Y-14 Tragflächenleistung: Einsatz von Hochauftriebsvorrichtungen (Klappen und Vorflügel)
Aeronautical Engineering
13.5K Ansichten

Turbulence Sphere-Methode: Bewertung der Strömungsqualität im Windkanal
Aeronautical Engineering
8.7K Ansichten

Querzylindrische Strömung: Messung der Druckverteilung und Einschätzung des Strömungswiderstandskoeffizient
Aeronautical Engineering
16.3K Ansichten

Analyse einer Düse: Variationen in Machzahl und Druck entlang einer konvergierenden und einer konvergierend-divergierenden Düse
Aeronautical Engineering
38.0K Ansichten

Schlieren-Imaging: Eine Technik zur Visualisierung der Eigenschaften von Überschallströmungen
Aeronautical Engineering
11.9K Ansichten

Strömungsvisualisierung in einem Wassertunnel: Beobachtung des Vorderkantenwirbels über einem Deltaflügel
Aeronautical Engineering
8.3K Ansichten

Surface Dye Flow Visualisierung: Eine qualitative Methode zur Beobachtung von Stromlinien in Überschallströmungen
Aeronautical Engineering
4.9K Ansichten

Pitotrohr: Ein Gerät zur Messung der Luftströmungsgeschwindigkeit
Aeronautical Engineering
49.4K Ansichten

Konstant-Temperatur-Anemometrie: Ein Werkzeug zur Untersuchung der turbulenten Grenzschichtströmung
Aeronautical Engineering
7.3K Ansichten

Druckwandler: Kalibrierung mit einem Pitotrohr
Aeronautical Engineering
8.5K Ansichten

Echtzeit-Flugsteuerung: Eingebettete Sensorkalibrierung und Datenerfassung
Aeronautical Engineering
10.3K Ansichten
Copyright © 2025 MyJoVE Corporation. Alle Rechte vorbehalten