Aérodynamique des multicoptères : Caractérisation de la poussée sur un hexacoptère
Vue d'ensemble
Source: Prashin Sharma et Ella M. Atkins, Department of Aerospace Engineering, University of Michigan, Ann Arbor, MI
Les multicopoptères sont de plus en plus populaires pour une variété d'applications commerciales et de loisirs. Ils sont généralement disponibles sous forme de quadcopter (quatre propulseurs), hexacopter (six propulseurs) et octocopter (huit propulseurs) configurations. Ici, nous décrivons un processus expérimental pour caractériser la performance multicopter. Une petite plate-forme modulaire d'hexacopter fournissant la redondance d'unité de propulsion est examinée. La poussée motrice statique individuelle est déterminée à l'aide d'un dynamomètre et de commandes d'hélice et d'entrée variables. Cette poussée statique est alors représentée en fonction du régime moteur, où le régime est déterminé à partir de la puissance motrice et de l'entrée de contrôle. L'hexacopter est ensuite monté sur un banc d'essai de cellules de charge dans une soufflerie de recirculation à basse vitesse de 5 pi x 7 po, et ses composants aérodynamiques de résistance à la portance et à la force de traînée ont été caractérisés pendant le vol à différents signaux moteurs, la vitesse de débit libre et l'angle d'attaque.
Un hexacopter a été choisi pour cette étude en raison de sa résistance à la défaillance du moteur (unité de propulsion), tel que rapporté dans Clothier1. En plus de la redondance dans le système de propulsion, le choix des composants à haute fiabilité est également nécessaire pour un vol sûr, en particulier pour les missions surpeuplées. Dans Ampatis2, les auteurs discutent de la sélection optimale des pièces multicopter, telles que les moteurs, les lames, les batteries et les contrôleurs de vitesse électroniques. Des recherches similaires ont également été rapportées dans Bershadsky3, qui se concentre sur le choix approprié d'un système d'hélice pour satisfaire aux exigences de la mission. En plus de la redondance et de la fiabilité des composants, la compréhension des performances du véhicule est également essentielle pour s'assurer que les limites de l'enveloppe de vol sont respectées et pour choisir la conception la plus efficace.
Principles
Un multicopter est un véhicule aérien qui a plusieurs rotors par rapport aux hélicoptères traditionnels, qui ont un seul rotor principal. Un rotor d'hélicoptère traditionnel a une hauteur variable, ce qui permet au pilote de contrôler la portance et la direction. En revanche, les multicopters s'appuient sur des rotors à pas fixe et utilisent des variations de vitesse pour le contrôle du véhicule.
Une variété de configurations multicopter différentes ont émergé, tels que les quadcopters avec quatre rotors, les hexacopters avec six rotors, et les octocopters avec huit rotors. Habituellement, les multicopters ont un nombre égal d'hélices fixes dans le sens des aiguilles d'une montre (CW) et dans le sens inverse des aiguilles d'une montre (CCW), et les variations de la vitesse des rotors entraînent les rotations suivantes en 3D pendant le vol :
- Yaw - rotation sur l'axe vertical, résultant en un changement d'angle de cap
- Rouler - rotation sur l'axe pointant vers l'avant du véhicule, ce qui entraîne un mouvement d'un côté à l'autre
- Pitch - rotation sur l'axe allant de gauche à droite, résultant en un mouvement d'inclinaison vers l'avant et vers l'arrière
Les multicoptères, y compris les hexacopters, peuvent être contrôlés pour maintenir un vol stable en ce qui concerne les degrés de liberté suivants :
- Vol stationnaire - Toutes les hélices sont actionnées à peu près à la même vitesse et produisent donc à peu près la même poussée. Étant donné que toutes les hélices sont également espacées du centre de gravité, la poussée des hélices ne produit aucun couple rotatif net sur l'avion. De plus, l'hexacopter utilise trois hélices tournantes dans le sens des aiguilles d'une montre (CW) et trois hélices rotatives dans le sens inverse des aiguilles d'une montre (CCW) de sorte que le couple d'hélice est annulé lorsqu'ils fonctionnent à vitesse égale. En vol stationnaire, la poussée ascendante totale équilibre la force gravitationnelle vers le bas, et le multicopter maintient zéro angle de tangage et de roulis dans des conditions de vent zéro (drag).
- Contrôle du roulis - Un hexacopter peut être contrôlé sur son axe de roulis en augmentant la vitesse des hélices d'un côté et en diminuant la vitesse des hélices de l'autre côté. Lorsque l'augmentation de poussée d'un côté est la même que la diminution de la poussée sur le côté opposé, la poussée nette reste la même. De même, l'effet net du couple reste le même.
- Contrôle de la hauteur - Pour un hexacopter, le contrôle de la hauteur est analogue au contrôle de roulis. Le différentiel de poussée entre les hélices avant et arrière fait que l'hexacopter se lance; si la poussée est augmentée dans les hélices arrière et diminuée dans les hélices avant, l'hexacopter se lance vers l'avant.
- Contrôle de la toite - Le contrôle de Laïc est réalisé en équilibrant les couplets de rotation de l'hélice dans le sens des aiguilles d'une montre avec les couplements de rotation de l'hélice dans le sens inverse des aiguilles d'une montre. En faisant tourner les hélices dans le sens inverse des aiguilles d'une montre plus rapidement que les hélices dans le sens des aiguilles d'une montre (ou vice versa), la réaction nette opposée sur l'hexacopter induit une rotation en lacet.
Un autre résumé de la physique des hexacopters est décrit ci-dessous.
Paramètres moteurs
Un modèle de paramètres loufoques selon Bangura4 est utilisé pour spécifier la poussée et le couple de chaque moteur / unité de propulseur d'hélice:
 (1)
(1)
 (2)
(2)
où  est la
est la  poussée générée, est
poussée générée, est  le couple moteur, est le coefficient de poussée,
le couple moteur, est le coefficient de poussée,  est le coefficient de moment et
est le coefficient de moment et  est la vitesse de rotation du moteur en RPM (révolutions par minute). La puissance et l'efficacité motrices peuvent être calculées à partir des équations suivantes :
est la vitesse de rotation du moteur en RPM (révolutions par minute). La puissance et l'efficacité motrices peuvent être calculées à partir des équations suivantes :
 (3)
(3)
 (4)
(4)
 (5)
(5)
 où est la
où est la  puissance mécanique produite,
puissance mécanique produite,  est
est  l'entrée d'énergie électrique à la tension et le courant, et
l'entrée d'énergie électrique à la tension et le courant, et  est l'efficacité du moteur.
est l'efficacité du moteur.  sont déterminés expérimentalement à l'aide des données obtenues à partir d'expériences de dynamomètre.
sont déterminés expérimentalement à l'aide des données obtenues à partir d'expériences de dynamomètre.
Dynamique hexacopter
La dynamique d'un hexacopter, telle que décrite dans Ducard5 et Powers6, est basée sur les cadres de référence illustrés dans la figure 1, où l'axe orthonormal représenté par  représentent un cadre de coordonnées mondiales avec l'origine à
représentent un cadre de coordonnées mondiales avec l'origine à  . Le cadre de coordonnées du monde est un cadre fixe avec tous les autres cadres définis à ce sujet, ce qui rend pratique d'exprimer la traduction et la cinématique rotationnelle d'un hexacopter. Le cadre de coordination
. Le cadre de coordonnées du monde est un cadre fixe avec tous les autres cadres définis à ce sujet, ce qui rend pratique d'exprimer la traduction et la cinématique rotationnelle d'un hexacopter. Le cadre de coordination  du
du  corps, donné par l'origine, est situé au centre de gravité (CG) pour l'hexacopter et est défini en ce qui concerne le cadre du monde; les axes de cadre de corps sont fixés à l'hexacopter. Le cadre de coordination du corps est utilisé pour définir la direction de poussée générée par l'hexacopter. Habituellement, pour les véhicules aériens, un cadre de vent est également défini avec son origine au véhicule CG. Le cadre du vent est utilisé pour exprimer les forces aérodynamiques et les moments agissant sur l'hexacopter. Cependant, aux fins de cette expérience, nous considérons le cadre mondial et le cadre ventcomme identique parce que le débit dans la soufflerie est toujours horizontal; pour plus d'informations sur les cadres de référence des aéronefs, voir McClamroch7.
corps, donné par l'origine, est situé au centre de gravité (CG) pour l'hexacopter et est défini en ce qui concerne le cadre du monde; les axes de cadre de corps sont fixés à l'hexacopter. Le cadre de coordination du corps est utilisé pour définir la direction de poussée générée par l'hexacopter. Habituellement, pour les véhicules aériens, un cadre de vent est également défini avec son origine au véhicule CG. Le cadre du vent est utilisé pour exprimer les forces aérodynamiques et les moments agissant sur l'hexacopter. Cependant, aux fins de cette expérience, nous considérons le cadre mondial et le cadre ventcomme identique parce que le débit dans la soufflerie est toujours horizontal; pour plus d'informations sur les cadres de référence des aéronefs, voir McClamroch7.
Tout d'abord, voici une introduction à la notation. L est la longueur du bras de chaque moteur hexacopter au véhicule centroïde dans le plan de carrosserie horizontale, et l'ampleur totale de la poussée motrice est donnée par et agit dans le cadre du corps z-direction. L'ampleur du couple  est donnée par un sous-scriptreprésentant l'axe de référence du cadre du corps.
est donnée par un sous-scriptreprésentant l'axe de référence du cadre du corps.  ,
, 
 et représentent les coefficients de traînée hexacopter le
et représentent les coefficients de traînée hexacopter le  long de chaque vent respectif ou
long de chaque vent respectif ou  équivalent axe de cadre du monde, est la masse de l'hexacopter, et est l'accélération gravitationnelle. La force de poussée totale et les couples de rotation en termes de valeurs de rPM moteur sont donnés par :
équivalent axe de cadre du monde, est la masse de l'hexacopter, et est l'accélération gravitationnelle. La force de poussée totale et les couples de rotation en termes de valeurs de rPM moteur sont donnés par :
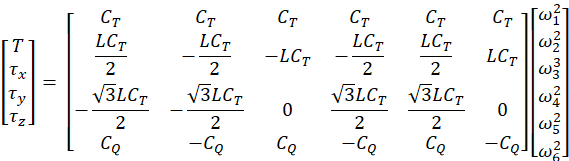 (6)
(6)
Les équations de Newton du mouvement linéaire dans le cadre du monde peuvent alors être définies comme :
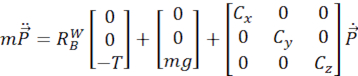 (7)
(7)
La  matrice de rotation est définie par la rotation de l'angle Z-X-Y Euler :
matrice de rotation est définie par la rotation de l'angle Z-X-Y Euler :
 (8)
(8)
où l'angle de lacet ( ) est la
de lacet ( ) est la rotation sur l'axe Z, l'angle de roulis ( ) est la rotation sur l'axe X, l'angle de tangage (
rotation sur l'axe Z, l'angle de roulis ( ) est la rotation sur l'axe X, l'angle de tangage ( ) est la rotation sur l'axe Y, et la notation
) est la rotation sur l'axe Y, et la notation  sténographie , est pour chaque angle.
sténographie , est pour chaque angle.
Dans ces expériences, nous ne nous intéressons qu'aux forces aérodynamiques agissant sur l'hexacopter en mouvement linéaire, mais pour l'exhaustivité dans la compréhension de la dynamique de l'hexacopter, les équations d'attitude du mouvement sont définies ci-dessous. Tout d'abord, p est défini comme la vitesse angulaire sur le corps X-axe, q est la vitesse angulaire sur le corps Y-axe, et r est la vitesse angulaire sur le corps Z-axe.
 (9)
(9)
 est la force ascendante appliquée par le propulseur i, et je suis le moment hexacopter de la matrice d'inertie qui peut être déterminée à l'aide d'un pendule bifilaire. De plus amples informations sur cette procédure peuvent être obtenues auprès de Quan8. Les vitesses angulaires du corps et du cadre du monde sont liées par :
est la force ascendante appliquée par le propulseur i, et je suis le moment hexacopter de la matrice d'inertie qui peut être déterminée à l'aide d'un pendule bifilaire. De plus amples informations sur cette procédure peuvent être obtenues auprès de Quan8. Les vitesses angulaires du corps et du cadre du monde sont liées par :
 (10)
(10)
Procédure
Ce protocole caractérise la poussée et l'aérodynamique des hexacopters. Pour cette expérience, nous avons utilisé des composants disponibles dans le commerce et disponibles sur le marché pour l'hexacopter, et les détails sont fournis dans le tableau 2. Pour le contrôleur de vol, nous avons sélectionné un pilote automatique open-source, Librepilot,9 car il a fourni la flexibilité pour commander les commandes motrices individuelles émises à l'hexacopter.
Le banc d'essai pour le montage de la cellule de charge et de l'hexacopter a été fabriqué à l'interne à l'aide de contreplaqué stratifié et est représenté à la figure 2. Lors de la conception du banc d'essai, notez qu'il doit permettre un ajustement précis de l'angle d'attaque du multicopter et être suffisamment rigide pour résister aux forces de flexion et aux vibrations créées lors de l'exploitation des moteurs.
Une cellule de charge à 6 axes est montée sur le banc d'essai et connectée au tableau d'acquisition de données, comme le montre la figure 3. Les forces aérodynamiques et de poussée sont senties dans le cadre du corps de l'hexacopter par la cellule de charge. Les données de la jauge de contrainte passent à travers un conditionneur de signal. Le conseil d'acquisition de données (DAQ) acquiert ensuite la force analogique et les composants de couple à l'aide d'une procédure d'étalonnage fournie par le fabricant de cellules de charge. Le conseil DAQ stocke ensuite ces valeurs dans un tampon haute vitesse et plus tard sur disque permanent.
Pour ce protocole, d'abord, déterminer les forces générées par les moteurs individuels. Déterminez ensuite les forces agissant sur la cellule nue, puis déterminez les forces générées par l'hexagone entier en fonction des commandes de rPM moteur. Émettre les mêmes commandes RPM à tous les moteurs pour chaque test.
1. Expérience Dynamomètre
Le dynamomètre permet de mesurer directement les paramètres, y compris la poussée, le couple, le régime, la tension de la batterie et le courant. Des paramètres tels que la puissance électrique, la puissance mécanique et l'efficacité motrice peuvent alors être dérivés d'équations (3), (4) et (5).
- Connectez le dynamomètre à l'ordinateur DAQ à l'aide d'un connecteur USB.
- Exécutez l'interface utilisateur graphique (GUI) fournie avec le dynamomètre.
- Calibrer le dynamomètre en suivant les instructions à l'écran fournies. Utilisez des poids et un bras de levier connu lorsqu'il est invité.
- Montez le moteur sur le support d'essai du dynamomètre.
- Fixez l'hélice dans une configuration de traction (tracteur), comme le montre la figure 4.
- Connectez la batterie au dynamomètre.
- Fixer fermement le dynamomètre à l'établi à l'aide de pinces C.
- Exécutez le programme d'entrée d'étape et enregistrez les paramètres mesurés, y compris la poussée, le couple, le régime moteur, le courant moteur et la modulation de la largeur des impulsions (PWM) de la commande « gazétissante ».
2. Test de poussée statique
- Attachez l'hexacopter sur le support d'essai des cellules de charge à l'aide de vis de montage.
- Ouvrez le système d'acquisition de données (DAQ) et exécutez le programme de biais de jauge de contrainte de cellules de charge.
- Connectez le contrôleur de vol hexacopter à l'ordinateur à l'aide d'un micro câble USB et ouvrez le logiciel Ground Controller Station (GCS).
- Connectez l'alimentation à l'hexacopter.
- Sélectionnez l'onglet Configuration - 'gt; Sortie en GCS. Liez tous les moteurs et vérifiez les tests en direct des sorties.
- Régler la commande de la manette des gaz désirée à 1300 ms. Assurez-vous que vous pouvez faire fonctionner tous les moteurs avec la même commande de gaz (PWM).
- Laissez le système se stabiliser pendant plusieurs secondes, puis exécutez le programme DAQ pour recueillir des données à partir de la cellule de charge.
- Une fois la collecte de données terminée, arrêtez les moteurs.
- Répétez les étapes 3. 6 à 3,8 pour les commandes de gaz 1500 ms et 1700 ms.
- Transférer les données stockées dans le système DAQ à un ordinateur de traitement de données et de stockage à long terme.
3. Test de poussée dynamique
Effectuez une série d'essais en soufflerie pour caractériser et analyser les forces aérodynamiques linéaires de l'hexacopter, principalement la portance et la traînée, sur une variété de vitesses et d'angles d'incidence. Pendant les expériences en soufflerie, on suppose que l'hexacopter se trouve dans des conditions de vol stables. Par conséquent, l'ampleur du vecteur de vitesse hexacopter est la même que la vitesse et supposé horizontale dans le cadre mondial. Les forces de levage et de traînée sont principalement dues à l'écoulement de l'air autour de l'hexacopter. Notez que les forces de levage et de traînée sont supposées caractériser la portance totale et la traînée totale sur l'hexacopter; les forces latérales sont négligeables.
La procédure expérimentale effectuée dans cette expérience est similaire à celles rapportées dans Foster10 et Russell11. Pendant les essais en soufflerie, l'hexacopter a été conduit par un convertisseur d'énergie branché sur la puissance du bâtiment (AC) pour assurer des niveaux de puissance et de tension constants tout au long de tous les essais. Notez que les moteurs à RPM élevés peuvent consommer le courant appréciable ; utiliser la jauge basse et le fil de courte longueur pour empêcher la chute de tension appréciable à travers le fil pendant l'opération.
- Monter l'hexacopter sur le support d'essai des cellules de charge
- Connectez la cellule de charge à l'ordinateur DAQ et connectez l'hexacopter au GCS en utilisant la procédure décrite pour le test de poussée statique.
- Sécurisez le banc d'essai jusqu'à la base de la soufflerie avec des pinces C.
- Assurez-vous que le multicopter est bien dégagé des murs de la soufflerie, du plancher et du plafond afin de minimiser les perturbations et la réflexion du flux libre.
- Montez des tubes pitot à plusieurs pieds de l'hexacopter pour échantillonner le flux d'air non perturbé. Connectez les capteurs de pression pitot au système DAQ.
- Réglez l'angle de tangage de l'hexacopter à 0 degrés en ajustant l'articulation de la charnière du banc d'essai. Dans la soufflerie, l'angle de tangage des hexacopters et l'angle d'attaque sont identiques.
- Exécutez le programme de biais pour établir des biais de tension de cellules de charge.
- Initialiser la soufflerie à la vitesse du vent de 2,2 m/s.
- Une fois que la vitesse de flux libre se dépose à la valeur désirée, recueillir des lectures DE base FT de la cellule de charge avec des moteurs hexacopter éteint.
- Initialiser la commande de la manette des gaz à 1300 ms, laisser la vitesse dans la soufflerie se déposer avant de recueillir des données FT et pitot.
- Répéter les étapes 3.7 - 3.9 pour les commandes de gaz de 1500 ms et 1700 ms.
- Répéter les étapes 3.5 - 3.10 pour différents angles de pas d'hexacopter et valeurs de vitesse de soufflerie, comme indiqué dans le tableau 1.
Résultats
Essais Dynamometer
Dans les figures 5-6, les parcelles illustrent la variation de la poussée et du couple, respectivement, avec l'augmentation du régime moteur. À partir de ces parcelles, le régime moteur minimum requis pour le multicopter pour planer peut être déterminé. Une parcelle montrant les données de plusieurs hélices peut être obtenue auprès de Sharma12. De plus, les relations quadratiques entre la poussée et le mIN par rapport au rPM peuvent être clairement observées, qui sont décrites dans Equations (1) et (2). En utilisant cette relation quadratique,  nous pouvons alors déterminer les coefficients et les coefficients de l'hélice 6040, qui sont les suivants:
nous pouvons alors déterminer les coefficients et les coefficients de l'hélice 6040, qui sont les suivants:

La figure 7 montre qu'une augmentation de la RPM correspondant à une augmentation de la consommation d'énergie électrique entraîne une diminution de l'efficacité du moteur. Des expériences similaires peuvent être menées pour différentes hélices afin d'obtenir l'efficacité du moteur pour la paire moteur-hélice. Les résultats de ces expériences sont utiles lors de la conception du véhicule pour déterminer la paire optimale d'hélice moteur à utiliser sur le multicopter. Ces décisions sont basées sur les paramètres de mission souhaités, tels que la durée et la vitesse du vol.
Puisqu'il n'y a pas de rétroaction directe de capteur de RPM sur l'hexacopter à faible coût, nous estimons RPM en installant une surface à travers rPM, puissance électrique, et commande de gaz (PWM). Cet ajustement de surface est utilisé pour estimer rPM en fonction de l'énergie électrique et de la valeur PWM. D'après les données recueillies à partir du dynamomètre, l'ajustement de surface est indiqué à la figure 8, avec l'équation correspondante :



où  se trouve le réglage du moteur PWM (accélérateur)
se trouve le réglage du moteur PWM (accélérateur)  normalisé par la valeur moyenne
normalisé par la valeur moyenne  de biais 1550 avec un écart type de 201,9 , alors qu'il est normalisé par biais 71,11 W avec un écart type de 55,75 W.
de biais 1550 avec un écart type de 201,9 , alors qu'il est normalisé par biais 71,11 W avec un écart type de 55,75 W.
Après avoir analysé les données du dynamomètre, un deuxième jeu de  données a été recueilli pour validation et fourni comme entrée de fonction. Les résultats sont ensuite tracés dans une série chronologique de variation rPM, comme on le voit dans la figure 9 et la figure 10. Ces parcelles confirment que l'ajustement estime rPM à moins de 95% limites de la RPM réelle, comme indiqué à la figure 9.
données a été recueilli pour validation et fourni comme entrée de fonction. Les résultats sont ensuite tracés dans une série chronologique de variation rPM, comme on le voit dans la figure 9 et la figure 10. Ces parcelles confirment que l'ajustement estime rPM à moins de 95% limites de la RPM réelle, comme indiqué à la figure 9.
Résultats de la soufflerie
Des expériences ont été menées dans la soufflerie à la suite de la matrice d'essai du tableau 1. Pour réduire la complexité, une condition d'angle zéro lacet (sideslip) a été maintenue en tout temps. Ceci est compatible avec la plupart des profils de vol dans lesquels les caméras et autres capteurs sont montés avec une orientation avant-orientée préférée. La variation de la traînée et de la portance sont tracées contre différents angles de tangage de l'hexacopter et sont indiquées dans les figures 11 et 12,respectivement. Les deux parcelles montrent que l'augmentation de la commande de la manette des gaz entraîne une augmentation significative de la force de levage (poussée motrice). De même, une augmentation de la vitesse en soufflerie entraîne une augmentation significative de la force de traînée agissant sur l'hexacopter. Ces tendances sont compatibles avec Equation (7).
Un modèle de poussée statique ne nécessite que des tests de dynamomètre. Cependant, pour obtenir une estimation précise de la poussée et de la traînée dynamiques, des expériences en soufflerie avec la détection des cellules de charge FT ont été nécessaires. Avec les données recueillies, nous pouvons développer une table  de recherche et de glisser les coefficients, en fonction de l'angle de tangage et de la vitesse du flux libre pour permettre une modélisation précise hexacopter FT.
de recherche et de glisser les coefficients, en fonction de l'angle de tangage et de la vitesse du flux libre pour permettre une modélisation précise hexacopter FT.

Figure 1. Cadres de coordination du monde et du corps de référence. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.

Figure 2. Banc d'essai de cellules de charge multicopter. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.

Figure 3. Diagramme du système d'acquisition de données de soufflerie (DAQ). Veuillez cliquer ici pour voir une version plus grande de ce chiffre.

Figure 4. Configuration dynamomètre. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.

Figure 5. Relation entre la poussée motrice et le RPM. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.

Figure 6. Relation entre le couple moteur et le RPM. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
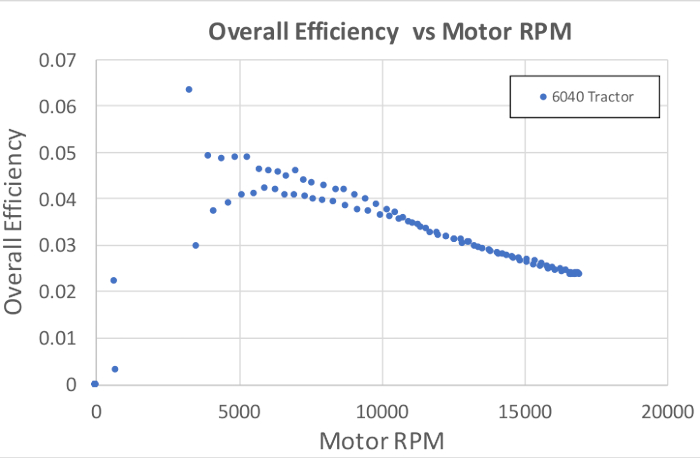
Figure 7. Efficacité globale du moteur par rapport à rPM. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.

Figure 8. La surface s'adapte à la manette des gaz (PWM), à l'alimentation électrique et au régime rPM. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
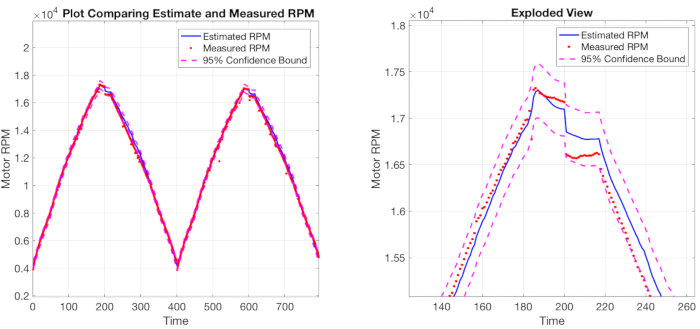
Figure 9. Validation  de la RPM mesurée directement à partir du dynamomètre. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
de la RPM mesurée directement à partir du dynamomètre. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
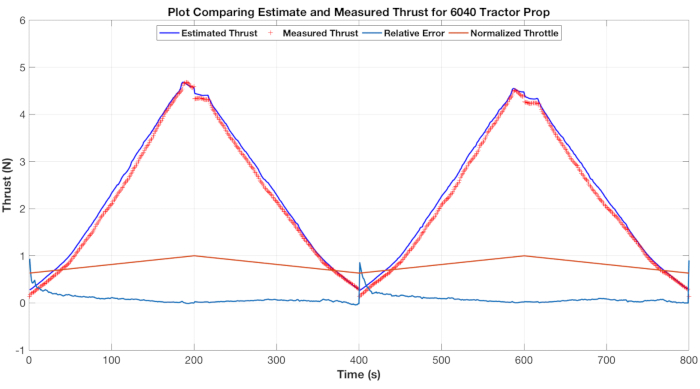
Figure 10. Validation des données de poussée estimées avec des données de poussée mesurées. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.

Figure 11. Chargez les forces de levage et de traînée des cellules pour différents angles de pas et commandes de gaz étant donné la vitesse constante du vent de 5 m/s. S'il vous plaît cliquez ici pour voir une version plus grande de ce chiffre.

Figure 12. Chargez les forces de levage et de traînée des cellules pour différents angles de tangage et commandes de gaz étant donné la vitesse constante du vent de 8,47 m/s. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
Tableau 1. Matrice d'essai de soufflerie
| Matrice d'essai de soufflerie | |||
| Vitesse du vent (m/s) | Angle de tangage (En) | Angle de Yaw(MD) | Commande de gaz (ms) |
| 2.2 | 30 à -30 | 0 | 0 et 1300 à 1700 |
| 4.5 | 30 à -30 | 0 | 0 et 1300 à 1700 |
| 6.7 | 30 à -30 | 0 | 0 et 1300 à 1700 |
| 8.9 | 30 à -30 | 0 | 0 et 1300 à 1700 |
Tableau 2. Liste des pièces
| Liste des pièces pour Hexacopter | |||||
| Sr Non | Partie No | description | Img | établir un lien | qté |
| 1 | SKU: 571000027-0 | Kit HobbyKing™ Totem Q450 Hexacopter |  |
https://hobbyking.com/en_us/hobbykingtm-totem-q450-hexacopter-kit.html | 1 |
| 2 | SKU: 57100064-0 | OpenPilot CC3D Revolution (Revo) 32bit F4 Contrôleur de vol basé avec/Integrated 433Mhz OPLink |  |
https://hobbyking.com/en_us/openpilot-cc3d-revolution-revo-32bit-flight-controller-w-integrated-433mhz-oplink.html | 1 |
| 3 | SKU: 571000065-0 | Openpilot OPLink Mini Ground Station 433 MHz |  |
https://hobbyking.com/en_us/openpilot-oplink-mini-ground-station-433-mhz.html | 1 |
| 4 | SKU: 953600003-0 | Multistar Elite 2204-2300KV 3-4s 4 pack (2/CCW 2/CW) |  |
https://hobbyking.com/en_us/multistar-elite-2204-2300kv-set-of-4-cw-ccw-2-ccw-2-cw.html | 2 |
| 5 | SKU: 9192000131-0 | Afro 20A Muti-Rotor ESC (SimonK Firmware) |  |
https://hobbyking.com/en_us/afro-esc-20amp-multi-rotor-motor-speed-controller-simonk-firmware.html | 8 |
| 6 | SKU: T2200.3S.30 | Pack Turnigy 2200mAh 3S 30C Lipo |  |
https://hobbyking.com/en_us/turnigy-2200mah-3s-30c-lipo-pack.html | 1 |
| 7 | SKU: 9171000144 | Hobby King Octocopter Power Distribution Board Hobby King Octocopter Power Distribution Board Hobby King Octocopter Power Distribution Board Hobby King |  |
https://hobbyking.com/en_us/hobby-king-octocopter-power-distribution-board.html | 1 |
| 8 | SKU: 426000022-0 | King KongMultirotor Prop 6x4 CW/CCW |  |
https://hobbyking.com/en_us/kingkong-multirotor-propeller-6x4-cw-ccw-black-20pcs.html | 1 |
| 8 | SKU: 329000304-0 | Gemfan Propeller 5x3 Noir (CW/CCW) (2pcs) |  |
https://hobbyking.com/en_us/gemfan-propeller-5x3-black-cw-ccw-2pcs.html | 10 |
| 9 | - | Spektrum DX6 Transmitter System MD2 avec récepteur AR610 |  |
https://www.amazon.com/Spektrum-Transmitter-System-AR610-Receiver/dp/B01B9DYOWG/ref=sr_1_2?ie=UTF8&qid=1494000219&sr=8-2&keywords=spektrum+dx6 | 1 |
| 10 | 709-RSP-1600-12 | Fournitures d'alimentation de commutation 1500W 12V 125A |  |
https://www.mouser.com/ProductDetail/Mean-Well/RSP-1600-12/?qs=%2fha2pyFadujYDPrAgY3T1JlGoR5AZMKL7jhmRydJUc1Z44%252bNekUvbQ%3d%3d | 1 |
| Liste des pièces pour DAQ | |||||
| Sr Non | Partie No | description | Img | établir un lien | qté |
| 1 | ATHM800-256ALP Rev F | Athena II PC /104 SBC |  |
http://www.diamondsystems.com/products/athenaii | 1 |
| 2 | SI-145-5 | Mini 45 Force /Capteur de couple |  |
http://www.ati-ia.com/products/ft/ft_models.aspx?id=Mini45 | 1 |
| 3 | - | Hobbypower Airspeed Sensor MPXV7002DP Pression différentielle |  |
https://www.amazon.com/Hobbypower-Airspeed-MPXV7002DP-Differential-controller/dp/B00WSFWO36/ref=pd_day0_21_2?_encoding=UTF8&pd_rd_i=B00WSFWO36&pd_rd_r=8KRZ03PR2XAJ1HXD4BKS&pd_rd_w=M1tek&pd_rd_wg=LVHjU&psc 1 et refRID-8KRZ03PR2XAJ1HXD4BKS | 1 |
| Liste des pièces pour Dynamometer | |||||
| Sr Non | Partie No | description | Img | établir un lien | qté |
| 1 | Série-1580 | Dynamomètre rc Benchmark |  |
https://www.rcbenchmark.com/dynamometer-series-1580/ | 1 |
Applications et Résumé
Ici nous décrivons un protocole pour caractériser les forces aérodynamiques agissant sur un hexacopter. Ce protocole peut être appliqué directement à d'autres configurations multirotor. Une bonne caractérisation des forces aérodynamiques est nécessaire pour améliorer la conception du contrôle, comprendre les limites de l'enveloppe de vol et estimer les champs éoliens locaux comme dans Xiang13. Le protocole présenté pour déterminer le régime moteur basé sur la consommation d'énergie et la commande des gaz a des applications directes pour estimer le RPM et la poussée lorsque des contrôleurs de vitesse électroniques à faible coût (ESC) sans détection de RPM sont utilisés. Enfin, l'application de techniques de contrôle avancées, telles que le contrôle prédictif du modèle pour le suivi de la trajectoire, nécessite une connaissance de l'aérodynamique du véhicule et des forces de poussée, comme décrit dans Kamel14.
References
- Clothier, R.A., and Walker, R.A., “Safety Risk Management of Unmanned Aircraft Systems,” Handbook of Unmanned Aerial Vehicles, Springer, 2015, pp. 2229–2275.
- Ampatis, C., and Papadopoulos, E., “Parametric Design and Optimization of Multi-rotor Aerial Vehicles,” Applications of Mathematics and Informatics in Science and Engineering, Springer, 2014, pp. 1–25.
- Bershadsky, D., Haviland, S., and Johnson, E. N., “Electric Multirotor UAV Propulsion System Sizing for Performance Prediction and Design Optimization,” 57th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conf., 2016.
- Bangura, M., Melega, M., Naldi, R., and Mahony, R., “Aerodynamics of Rotor Blades for Quadrotors,” arXiv preprint arXiv:1601.00733, 2016
- Ducard, G., and Minh-Duc Hua. "Discussion and Practical Aspects on Control Allocation for a Multi-rotor Helicopter." Conf. on Unmanned Aerial Vehicle in Geomatics, 2011.
- Powers C., Mellinger D., Kumar V. “Quadrotor Kinematics and Dynamics” In: Handbook of Unmanned Aerial Vehicles. Springer, 2015
- McClamroch, N. Harris. “Steady Aircraft Flight and Performance.” Princeton University Press, 2011.
- Quan, Q., “Introduction to Multicopter Design and Control”, Springer Singapore, 2017.
- LibrePilot, https://www.librepilot.org/site/index.html
- Foster, J. and Hartman, D., “High-Fidelity Multi-Rotor Unmanned Aircraft System Simulation Development for Trajectory Prediction under Off-Nominal Flight Dynamics,” Proc. Air Transportation Integration & Operations (ATIO) Conference, AIAA, 2017.
- Russell, Carl R., et al. "Wind Tunnel and Hover Performance Test Results for Multicopter UAS Vehicles," 2016.
- Sharma, P. and Atkins, E., “An Experimental Investigation of Tractor and Pusher Hexacopter Performance,” Proc. AIAA Aviation Conference, AIAA, June 2018. (to appear)
- Xiang, X., et al. "Wind Field Estimation through Autonomous Quadcopter Avionics." 35th AIAA/IEEE Digital Avionics Systems Conference (DASC), IEEE, 2016.
- Kamel, M., et al. "Model Predictive Control for Trajectory Tracking of Unmanned Aerial Vehicles using Robot Operating System." Robot Operating System (ROS). Springer, Cham, 2017, 3-39.
Tags
Passer à...
Vidéos de cette collection:

Now Playing
Aérodynamique des multicoptères : Caractérisation de la poussée sur un hexacoptère
Aeronautical Engineering
9.1K Vues

Performances aérodynamiques d'un modèle réduit d'avion : Le DC-6B
Aeronautical Engineering
8.3K Vues

Caractérisation de l'hélice : Variations du pas, du diamètre et du nombre de lame sur la performance
Aeronautical Engineering
26.1K Vues

Comportement de l'aile : Distribution de la pression sur une aile de Clark Y-14
Aeronautical Engineering
21.0K Vues

Performance des ailes du Clark Y-14 : Déploiement des dispositifs hypersustentateurs (volets et lamelles)
Aeronautical Engineering
13.3K Vues

Méthode des sphères de turbulence : Évaluation de la qualité de l'écoulement en soufflerie
Aeronautical Engineering
8.7K Vues

Flux cylindrique croisé : Mesurer la distribution de la pression et estimer les coefficients de traînée
Aeronautical Engineering
16.1K Vues

Variations du nombre de Mach et de la pression le long d'une tuyère convergente et d'une tuyère de Laval
Aeronautical Engineering
37.8K Vues

Imagerie Schlieren: Une technique pour visualiser les caractéristiques des écoulements supersoniques
Aeronautical Engineering
11.4K Vues

Visualisation de l'écoulement dans un tunnel hydrodynamique : Observation d'un tourbillon sur une aile Delta
Aeronautical Engineering
8.0K Vues

Visualisation de l'écoulement de colorants en surface : Une méthode qualitative pour visualiser les lignes de courant dans un écoulement supersonique
Aeronautical Engineering
4.9K Vues

Tube de Pitot : Un dispositif pour mesurer la vitesse du flux d'air
Aeronautical Engineering
48.7K Vues

Anémomètre à température constante : Un outil pour étudier les écoulements dans la couche limite turbulente
Aeronautical Engineering
7.2K Vues

Transducteur de pression : Calibrage à l'aide d'un tube de Pitot
Aeronautical Engineering
8.5K Vues

Contrôle de vol en temps réel : Étalonnage de capteurs embarqués et acquisition de données
Aeronautical Engineering
10.1K Vues
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.