多直升机空气动力学:六轴飞行器上的特征推力
Overview
资料来源:普拉申·夏尔马和埃拉·阿特金斯,密歇根大学航空航天工程系,安阿伯,密歇根州
多直升机正在成为各种爱好和商业应用的流行。它们通常可作为四轴飞行器(四个推进器)、六轴飞行器(六个推进器)和八轴飞行器(八个推进器)配置。在这里,我们描述了一个实验过程来描述多直升机的性能。测试了提供推进单元冗余的模块化小型六轴器平台。使用测功机和不同的螺旋桨和输入命令确定单个静态电机推力。然后,此静态推力表示为电机 RPM 的函数,其中转速由电机功率和控制输入确定。然后,六轴飞行器安装在5'x 7'低速再循环风洞的称重传感器测试台上,其空气动力学提升和阻力部件在飞行过程中以不同的运动信号、自由流动速度和攻击角度进行特征。
六轴飞行器之所以被选中用于这项研究,是因为它能够适应电机(推进单元)故障,如《克洛蒂耶1号》所报道的。除了推进系统的冗余外,安全飞行也需要选择高可靠性部件,特别是对于任务人口过剩的地区。在《安帕地斯2》中,作者讨论了多轴飞行器部件的最佳选择,如电机、叶片、电池和电子速度控制器。贝尔沙斯基3号也进行了类似的研究,该研究的重点是正确选择螺旋桨系统,以满足任务要求。除了部件的冗余和可靠性外,了解车辆性能对于确保遵守飞行包络限制和选择最有效的设计也至关重要。
Principles
与具有单主旋翼的传统直升机相比,多直升机是具有多个转子的飞行器。传统的直升机旋翼具有可变俯仰,使飞行员能够控制提升和转向。相比之下,多直升机依靠固定螺距转子,并使用电机速度的变化进行车辆控制。
各种不同的多轴飞行器配置已经出现,例如四轴飞行器,六轴飞行器,六翼转子,以及八个转子。通常,多轴飞机具有相等数量的顺时针 (CW) 和逆时针 (CCW) 固定螺距螺旋桨,转子速度的变化会导致在飞行过程中进行以下 3D 旋转:
- 偏航 = 绕垂直轴旋转,导致方向角度变化
- 滚动 = 绕向车辆前部方向的轴旋转,导致侧向移动
- 俯仰 = 绕轴旋转,从左到右运行,导致向前和向后倾斜运动
可以控制多直升机(包括六轴飞行器),以在以下自由度方面保持稳定的飞行:
- 悬停 – 所有螺旋桨以大致相同的速度运行,因此产生大致相同的推力。由于所有螺旋桨与重心的间距相等,因此螺旋桨的推力不会产生飞机的净旋转扭矩。此外,六轴飞行器使用三个顺时针 (CW) 旋转螺旋桨和三个逆时针 (CCW) 旋转螺旋桨,以便在以相同速度运行时取消螺旋桨扭矩。在悬停中,总向上推力平衡向下的重力,多直升机在零风(拖动)条件下保持零俯仰和滚动角度。
- 滚动控制 – 六轴球可以控制其卷轴,增加螺旋桨的一侧速度,降低另一侧的螺旋桨速度。当一侧的推力增加与另一侧的推力减小相同时,净推力保持不变。同样,扭矩的净效应保持不变。
- 俯仰控制 – 对于六轴飞行器,俯仰控制类似于滚动控制。前螺旋桨和后螺旋桨之间的推力差使六轴飞行器俯仰;如果后螺旋桨的推力增加,在前进的螺旋桨中减小,六轴飞行器将向前推。
- Yaw 控制 – 通过平衡顺时针螺旋桨旋转扭矩与逆时针螺旋桨旋转扭矩来实现 Yaw 控制。通过逆时针螺旋桨比顺时针螺旋桨旋转得更快(反之亦然),六轴飞行器上的相反网络反应在偏航中产生旋转。
下面将介绍六轴飞行器物理的进一步摘要。
电机参数
根据 Bangura4,一个集中参数模型用于指定每个电机/螺旋桨推进器单元的推力和扭矩:
 (1)
(1)
 (2)
(2)
其中 产生的推力,
产生的推力, 是电机扭矩,
是电机扭矩, 是推力系数,
是推力系数, 是力矩系数,
是力矩系数, 是转速(每分钟转数)中的电机转速。电机功率和效率可以从以下方程中计算:
是转速(每分钟转数)中的电机转速。电机功率和效率可以从以下方程中计算:
 (3)
(3)
 (4)
(4)
 (5)
(5)
其中 产生的
产生的 机械功率,是
机械功率,是 电压和电流
电压和电流 时的功率输入,是
时的功率输入,是 电机效率。
电机效率。 使用测功机实验获得的数据进行实验确定。
使用测功机实验获得的数据进行实验确定。
六轴飞行器动力学
如 Ducard5和幂6中所述,六轴计的动力学基于图 1所示的参考帧,其中表示的 正交轴表示具有原点的世界坐标框,
正交轴表示具有原点的世界坐标框,  .世界坐标框是一个固定框架,与它定义的所有其他帧,便于表达六轴飞行器的平移和旋转运动学。主体坐标框架,由
.世界坐标框是一个固定框架,与它定义的所有其他帧,便于表达六轴飞行器的平移和旋转运动学。主体坐标框架,由 原点
原点 给出,位于六轴飞行器的重心(CG),并相对于世界框架进行定义;车身框架轴固定在六轴器上。车身坐标框用于定义六轴飞行器产生的推力方向。通常,对于空中飞行器,风架也定义与它的起源在车辆CG。风架用于表示六轴飞行器上的空气动力学力和力矩。然而,为了这个实验的目的,我们认为世界框架和风架是相同的,因为风洞中的流量总是水平的;有关飞机参考框架的更多信息,请参阅麦克克拉姆罗奇7。
给出,位于六轴飞行器的重心(CG),并相对于世界框架进行定义;车身框架轴固定在六轴器上。车身坐标框用于定义六轴飞行器产生的推力方向。通常,对于空中飞行器,风架也定义与它的起源在车辆CG。风架用于表示六轴飞行器上的空气动力学力和力矩。然而,为了这个实验的目的,我们认为世界框架和风架是相同的,因为风洞中的流量总是水平的;有关飞机参考框架的更多信息,请参阅麦克克拉姆罗奇7。
首先,这里是符号的介绍。L是水平体平面中每个六轴电机到车辆质心的手臂长度,总电机推力幅度由车身框架z方向给出并作用。扭矩幅度由 表示车身框架参考轴的子标给出。
表示车身框架参考轴的子标给出。

 ,表示
,表示 六轴飞行器沿每个风或等效世界框架轴的六轴飞行器拖动系数,是六轴飞行器的质量,是重力加速度。
六轴飞行器沿每个风或等效世界框架轴的六轴飞行器拖动系数,是六轴飞行器的质量,是重力加速度。  总推力和旋转扭矩(以电机转速值计算)由以下值给出:
总推力和旋转扭矩(以电机转速值计算)由以下值给出:
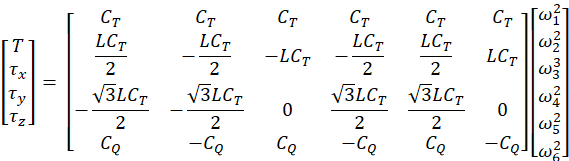 (6)
(6)
牛顿在世界框架中的线性运动方程可以定义为:
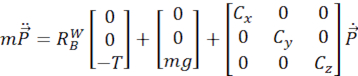 (7)
(7)
旋转矩阵 由 Z-X-Y 欧拉角度旋转定义:
由 Z-X-Y 欧拉角度旋转定义:
 (8)
(8)
其中偏航角 () 是绕 Z 轴旋转的,滚动角
() 是绕 Z 轴旋转的,滚动角 ( ) 是绕 X 轴旋转的,俯仰角 (
( ) 是绕 X 轴旋转的,俯仰角 ( ) 是绕 Y 轴
) 是绕 Y 轴 旋转的,而速记符号是每个角度的旋转。
旋转的,而速记符号是每个角度的旋转。
在这些实验中,我们只关注在线性运动中作用于六轴飞行器的空气动力学力,但对于理解六轴飞行器动力学的完整性,下面定义了运动的姿态方程。首先,p定义为物体的X轴角速度,q是物体Y轴的角速度,r是物体Z轴的角速度。
 (9)
(9)
 是推进器 i 施加的向上力,i是可以使用双尖钟摆确定的惯性矩阵的六轴飞行器矩。 有关这个程序的更多信息,请从Quan8获得。身体和世界框架角度速度由:
是推进器 i 施加的向上力,i是可以使用双尖钟摆确定的惯性矩阵的六轴飞行器矩。 有关这个程序的更多信息,请从Quan8获得。身体和世界框架角度速度由:
 (10)
(10)
Procedure
该协议具有六轴飞行器推力和空气动力学特性。对于此实验,我们使用了六轴飞行器的商用现成组件,详情见表 2。对于飞行控制器,我们选择了一个开源自动驾驶仪 Librepilot,9,因为它提供了灵活性来控制向六轴飞行器发出的单个电机命令。
安装称重传感器和六轴飞行器的试验台是使用层压胶合板在内部制造的,如图2所示。设计测试台时,请注意,必须允许精确调整多直升机的攻击角度,并有足够的刚性,以承受操作电机时产生的弯曲力和振动。
6轴称重传感器安装在测试台上,并连接到数据采集板,如图3所示。载荷单元在六轴飞行器的车身框架中感应空气动力学和推力力。应变片数据通过信号调节器。然后,数据采集 (DAQ) 板使用称重传感器制造商提供的校准程序获取模拟力和扭矩分量。然后,DAQ 板将这些值存储在高速缓冲区中,然后存储在永久磁盘中。
对于此协议,首先,确定单个电机产生的力。然后确定作用于裸机架的力,然后确定整个六轴飞行器产生的力作为电机 RPM 命令的函数。为每个测试向所有电机发出相同的 RPM 命令。
1. 测功机实验
测功机可直接测量参数,包括推力、扭矩、转速、电池电压和电流。然后,可以从方程 (3)、(4) 和 (5) 派生出电功率、机械功率和电机效率等参数。
- 使用 USB 接口将测功机连接到 DAQ 计算机。
- 运行测功机提供的图形用户界面 (GUI)。
- 按照提供的屏幕说明校准测功机。在提示时使用重量和已知操纵臂。
- 将电机安装在测功机测试台上。
- 以拉拔器(牵引器)配置连接螺旋桨,如图4所示。
- 将电池连接到测功机。
- 使用 C 卡箍将测功机牢固地固定到工作台。
- 运行步进程序并记录测量参数,包括推力、扭矩、电机转速、电机电流和脉冲宽度调制 (PWM) "节流"命令。
2. 静态推力测试
- 使用安装螺钉将六轴飞行器固定在称重传感器测试台上。
- 打开数据采集系统 (DAQ),并运行称重传感器应变片偏置程序。
- 使用微型 USB 电缆将六轴飞行器飞行控制器连接到计算机,并打开接地控制器站 (GCS) 软件。
- 将电源连接到六轴器。
- 选择"配置"选项卡 -> GCS 中的输出。链接所有电机,并检查输出的实时测试。
- 将所需的油门命令设置为 1300 ms。确保可以使用相同的油门 (PWM) 命令操作所有电机。
- 让系统稳定几秒钟,然后运行 DAQ 程序从称重传感器收集数据。
- 数据收集完成后,停止电机。
- 重复步骤 3。6 到 3.8 用于油门命令 1500 ms 和 1700 ms。
- 将存储在 DAQ 系统中的数据传输到数据处理计算机和长期存储。
3. 动态推力测试
执行一系列风洞测试,以在各种风速和入射角度上描述和分析六轴飞行器的线性空气动力学力,主要是提升和拖动。在风洞实验中,六轴飞行器假定处于稳定的飞行条件下。因此,六轴飞行器速度矢量的大小与空速相同,在世界帧中假定为水平。提升力和拖动力主要是由于六轴器周围的气流。请注意,假定提升力和拖动力是六轴飞行器上总提升和总阻力的特征;侧力可以忽略不计。
这个实验中的实验过程与福斯特10和罗素11中报道的实验程序相似。在风洞测试期间,六轴飞行器由插入建筑物 (AC) 电源的电源转换器驱动,以确保在所有测试过程中一致的功率和电压水平。请注意,高 RPM 的电机可能会消耗明显的电流;使用低仪表和短长度导线,以防止在操作过程中导线上出现明显的电压降。
- 将六轴器安装在称重传感器测试台上
- 将称重传感器连接到 DAQ 计算机,并使用静态推力测试描述的步骤将六轴器连接到 GCS。
- 使用 C 夹将测试台固定到风洞底部。
- 确保多直升机在风洞墙壁、地板和天花板下都畅通无阻,以尽量减少自由流动的干扰和反射。
- 在离六轴飞行器几英尺远的地方安装皮托管,以样品不受干扰的气流。将皮托压力传感器连接到 DAQ 系统。
- 通过调整测试台的铰链接头,将六轴飞行器的俯仰角设置为 0°。在风洞中,六轴飞行器的俯仰角和攻击角度是相同的。
- 运行偏置程序以建立称重传感器电压偏差。
- 将风洞初始化为风速为2.2米/s。
- 自由流流量速度稳定到所需值后,在关闭六轴飞行器电机时从称重传感器收集基线 FT 读数。
- 将节气门命令初始化为 1300 ms,在收集 FT 和 pitot 数据之前,让风洞中的空速稳定下来。
- 对于 1500 ms 和 1700 ms 的油门命令,重复步骤 3.7 - 3.9。
- 重复步骤 3.5 - 3.10,以使用不同的六轴器间距角度和风洞空速值,如表 1 所述。
Results
测功机测试
在图5-6中,这些图分别说明了推力和扭矩的变化,增加了电机转速。从这些图中,可以确定多直升机悬停所需的最小电机转速。一个显示来自多个螺旋桨数据的图可以从夏尔马12获得。此外,可以清楚地观察到推力与转速和力矩与转速之间的二次关系,这些关系在方程 (1) 和 (2) 中描述。使用此二次关系,我们可以确定 6040  螺旋桨的系数和系数,如下所示:
螺旋桨的系数和系数,如下所示:

图 7显示,转速的增加与电力消耗的增加相对应导致电机效率降低。可以对不同的螺旋桨进行类似的实验,以获得电机-螺旋桨对的电机效率。这些实验的结果在车辆设计中有助于确定在多直升机上使用的最佳电机螺旋桨对。这些决定基于所需的任务参数,如飞行的持续时间和速度。
由于对于低成本六轴飞行器没有直接的 RPM 传感器反馈,我们通过在 RPM、电力和节气门 (PWM) 命令上安装表面来估计转速。此表面拟合用于估计转速作为电力和 PWM 值的函数。根据从测功机收集的数据,图8显示了表面配合,并带有相应的方程:



其中, 电机 PWM(节气门)设置由平均偏置值 1550
电机 PWM(节气门)设置由平均偏置值 1550 归一化,标准偏差为
归一化,标准偏差为 201.9,而偏置 71.11 W以标准偏差 55.75 W 归化。
201.9,而偏置 71.11 W以标准偏差 55.75 W 归化。
分析测功机数据后,收集了第二个数据集进行验证,并作为函数的 输入提供。然后,在 RPM 变化的时间序列中绘制结果,如图9和图10所示。这些图确认拟合估计 RPM 在实际 RPM 的 95% 范围内,如图9所示。
输入提供。然后,在 RPM 变化的时间序列中绘制结果,如图9和图10所示。这些图确认拟合估计 RPM 在实际 RPM 的 95% 范围内,如图9所示。
风洞结果
根据表1中的测试矩阵,在风洞中进行了实验。为了降低复杂性,始终保持零偏航(侧滑)角度条件。这与大多数飞行配置文件一致,其中摄像机和其他传感器都安装有首选的正向方向。拖曳和提升的变化根据六轴飞行器的不同俯仰角绘制,分别显示在图11和图12中。两个图都显示,增加节气门命令会导致提升(电机推力)力的显著增加。同样,风洞速度的提高会导致六轴飞行器的阻力显著增加。这些趋势与方程 (7) 一致。
静态推力模型只需要测功机测试。然而,为了获得动态推力和阻力的准确估计,需要用FT载载单元传感进行风洞实验。通过收集的数据,我们可以开发一个查找表的和和和拖动系数, 作为俯仰角度和自由流风速的函数,以实现精确的六轴飞行器FT建模。
作为俯仰角度和自由流风速的函数,以实现精确的六轴飞行器FT建模。

图 1.参考世界和正文坐标框架。请点击此处查看此图的较大版本。

图 2.多直升机称重传感器测试台。请点击此处查看此图的较大版本。

图 3.风洞数据采集(DAQ)系统图。请点击此处查看此图的较大版本。

图 4.测功机设置。请点击此处查看此图的较大版本。

图 5.电机推力和转速之间的关系。请点击此处查看此图的较大版本。

图 6.电机扭矩与转速之间的关系。请点击此处查看此图的较大版本。
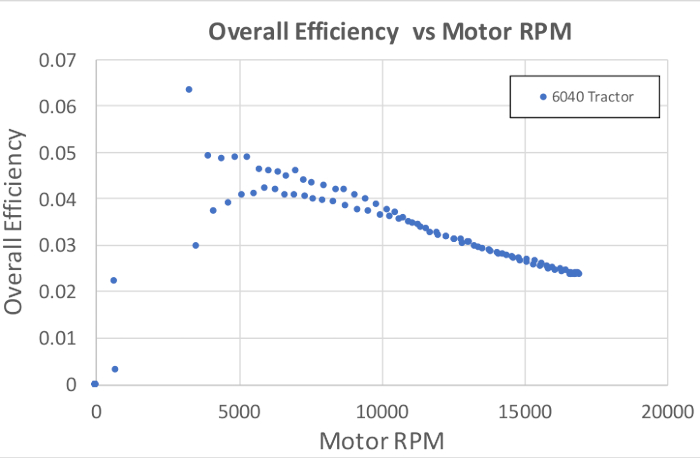
图 7.总体电机效率与转速。请点击此处查看此图的较大版本。

图8。表面适合油门 (PWM)、电源和转速。请点击此处查看此图的较大版本。
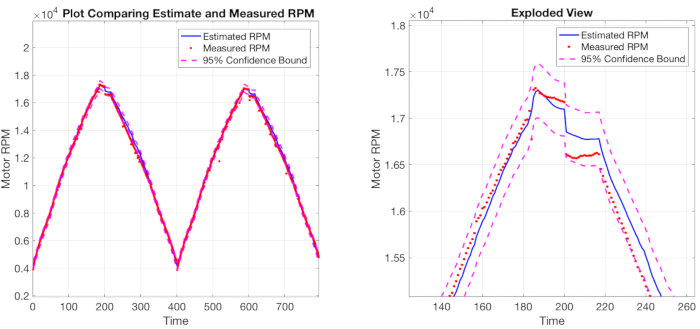
图 9.直接从测 功机测量的 RPM 验证。请点击此处查看此图的较大版本。
功机测量的 RPM 验证。请点击此处查看此图的较大版本。
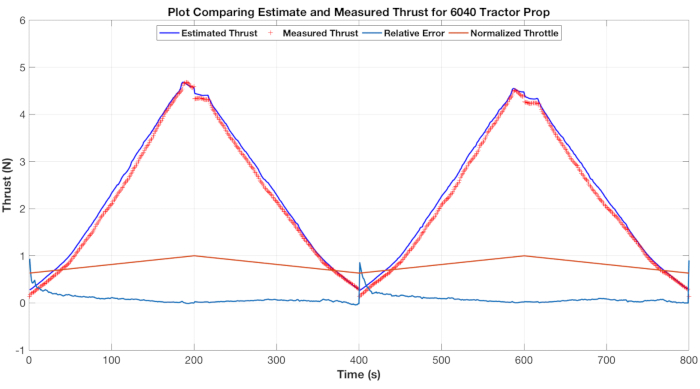
图 10.使用测量的推力数据验证估计推力数据。请点击此处查看此图的较大版本。

图11。在恒定风速为5 m/s的情况下,不同俯仰角度和节气门命令的称重单元提升和阻力。请点击此处查看此图的较大版本。

图12。在恒定风速为8.47 m/s的情况下,不同俯仰角度和节气门命令的称重单元提升和阻力。请点击此处查看此图的较大版本。
表 1.风洞试验矩阵
| 风洞测试矩阵 | |||
| 风速(米/斯) | 俯仰角度 (°) | 偏角(*) | 油门命令(毫秒) |
| 2.2 | 30 至 -30 | 0 | 0 和 1300 到 1700 |
| 4.5 | 30 至 -30 | 0 | 0 和 1300 到 1700 |
| 6.7 | 30 至 -30 | 0 | 0 和 1300 到 1700 |
| 8.9 | 30 至 -30 | 0 | 0 和 1300 到 1700 |
表2.零件列表
| 六轴飞行器的零件列表 | |||||
| Sr 否 | 部件号 | 描述 | Img | 链接 | 数量 |
| 1 | SKU: 571000027-0 | 霍比金™图腾Q450六轴飞行器套件 |  |
https://hobbyking.com/en_us/hobbykingtm-totem-q450-hexacopter-kit.html | 1 |
| 2 | SKU: 571000064-0 | OpenPilot CC3D 革命 (Revo) 32 位 F4 基于飞行控制器,集成 433Mhz OPLink |  |
https://hobbyking.com/en_us/openpilot-cc3d-revolution-revo-32bit-flight-controller-w-integrated-433mhz-oplink.html | 1 |
| 3 | SKU: 571000065-0 | 开机 OPLink 迷你接地站 433 MHz |  |
https://hobbyking.com/en_us/openpilot-oplink-mini-ground-station-433-mhz.html | 1 |
| 4 | SKU: 9536000003-0 | 多星精英 2204-2300KV 3-4s 4 包 (2/CCW 2/CW) |  |
https://hobbyking.com/en_us/multistar-elite-2204-2300kv-set-of-4-cw-ccw-2-ccw-2-cw.html | 2 |
| 5 | SKU: 9192000131-0 | 非洲 20A 穆蒂-罗托埃塞 ESC (西蒙K 固件) |  |
https://hobbyking.com/en_us/afro-esc-20amp-multi-rotor-motor-speed-controller-simonk-firmware.html | 8 |
| 6 | SKU: T2200.3S.30 | Turnigy 2200mAh 3S 30C Lipo 包 |  |
https://hobbyking.com/en_us/turnigy-2200mah-3s-30c-lipo-pack.html | 1 |
| 7 | SKU: 9171000144 | 爱好国轴飞行器配电板 |  |
https://hobbyking.com/en_us/hobby-king-octocopter-power-distribution-board.html | 1 |
| 8 | SKU: 426000022-0 | 金刚多旋翼道具 6x4 CW/CCW |  |
https://hobbyking.com/en_us/kingkong-multirotor-propeller-6x4-cw-ccw-black-20pcs.html | 1 |
| 8 | SKU: 329000304-0 | Gemfan 推进器 5x3 黑色 (CW/CCW) (2 件) |  |
https://hobbyking.com/en_us/gemfan-propeller-5x3-black-cw-ccw-2pcs.html | 10 |
| 9 | - | 带 AR610 接收器的 Spektrum DX6 发射器系统 MD2 |  |
https://www.amazon.com/Spektrum-Transmitter-System-AR610-Receiver/dp/B01B9DYOWG/ref=sr_1_2?ie=UTF8&qid=1494000219&sr=8-2&keywords=spektrum+dx6 | 1 |
| 10 | 709-RSP-1600-12 | 开关电源 1500W 12V 125A |  |
https://www.mouser.com/ProductDetail/Mean-Well/RSP-1600-12/?qs=%2fha2pyFadujYDPrAgY3T1JlGoR5AZMKL7jhmRydJUc1Z44%252bNekUvbQ%3d%3d | 1 |
| DAQ 的零件列表 | |||||
| Sr 否 | 部件号 | 描述 | Img | 链接 | 数量 |
| 1 | ATHM800-256ALP 修订版 F | 雅典娜 II PC /104 SBC |  |
http://www.diamondsystems.com/products/athenaii | 1 |
| 2 | SI-145-5 | 迷你 45 力/扭矩传感器 |  |
http://www.ati-ia.com/products/ft/ft_models.aspx?id=Mini45 | 1 |
| 3 | - | 霍比功率空速传感器 MPXV7002DP 差压 |  |
https://www.amazon.com/Hobbypower-Airspeed-MPXV7002DP-Differential-controller/dp/B00WSFWO36/ref=pd_day0_21_2?_encoding=UTF8&pd_rd_i=B00WSFWO36&pd_rd_r=8KRZ03PR2XAJ1HXD4BKS&pd_rd_w=M1tek&pd_rd_wg=LVHjU&psc*1&refRID=8KRZ03PR2XAJ1HXD4BKS | 1 |
| 测功机零件列表 | |||||
| Sr 否 | 部件号 | 描述 | Img | 链接 | 数量 |
| 1 | 系列-1580 | RC 基准测功仪 |  |
https://www.rcbenchmark.com/dynamometer-series-1580/ | 1 |
Application and Summary
在这里,我们描述了一个协议来描述作用于六轴飞行器的空气动力学力。该协议可以直接应用于其他多转子配置。需要正确描述空气动力学力,以改善控制设计,了解飞行包络极限,并估计湘13的局部风场。在使用没有 RPM 感应的低成本电子速度控制器 (ESC) 时,基于功耗和节气门命令确定电机转速的协议具有直接应用来估计转速和推力。 最后,如卡迈勒14所述,应用先进的控制技术,如在模型预测控制中用于轨迹跟踪,需要具备车辆空气动力学和推力的知识。
References
- Clothier, R.A., and Walker, R.A., “Safety Risk Management of Unmanned Aircraft Systems,” Handbook of Unmanned Aerial Vehicles, Springer, 2015, pp. 2229–2275.
- Ampatis, C., and Papadopoulos, E., “Parametric Design and Optimization of Multi-rotor Aerial Vehicles,” Applications of Mathematics and Informatics in Science and Engineering, Springer, 2014, pp. 1–25.
- Bershadsky, D., Haviland, S., and Johnson, E. N., “Electric Multirotor UAV Propulsion System Sizing for Performance Prediction and Design Optimization,” 57th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conf., 2016.
- Bangura, M., Melega, M., Naldi, R., and Mahony, R., “Aerodynamics of Rotor Blades for Quadrotors,” arXiv preprint arXiv:1601.00733, 2016
- Ducard, G., and Minh-Duc Hua. "Discussion and Practical Aspects on Control Allocation for a Multi-rotor Helicopter." Conf. on Unmanned Aerial Vehicle in Geomatics, 2011.
- Powers C., Mellinger D., Kumar V. “Quadrotor Kinematics and Dynamics” In: Handbook of Unmanned Aerial Vehicles. Springer, 2015
- McClamroch, N. Harris. “Steady Aircraft Flight and Performance.” Princeton University Press, 2011.
- Quan, Q., “Introduction to Multicopter Design and Control”, Springer Singapore, 2017.
- LibrePilot, https://www.librepilot.org/site/index.html
- Foster, J. and Hartman, D., “High-Fidelity Multi-Rotor Unmanned Aircraft System Simulation Development for Trajectory Prediction under Off-Nominal Flight Dynamics,” Proc. Air Transportation Integration & Operations (ATIO) Conference, AIAA, 2017.
- Russell, Carl R., et al. "Wind Tunnel and Hover Performance Test Results for Multicopter UAS Vehicles," 2016.
- Sharma, P. and Atkins, E., “An Experimental Investigation of Tractor and Pusher Hexacopter Performance,” Proc. AIAA Aviation Conference, AIAA, June 2018. (to appear)
- Xiang, X., et al. "Wind Field Estimation through Autonomous Quadcopter Avionics." 35th AIAA/IEEE Digital Avionics Systems Conference (DASC), IEEE, 2016.
- Kamel, M., et al. "Model Predictive Control for Trajectory Tracking of Unmanned Aerial Vehicles using Robot Operating System." Robot Operating System (ROS). Springer, Cham, 2017, 3-39.
Tags
跳至...
此集合中的视频:

Now Playing
多直升机空气动力学:六轴飞行器上的特征推力
Aeronautical Engineering
9.1K Views

模型飞机的空气动力学性能:DC-6B
Aeronautical Engineering
8.3K Views

推进器特性:音高、直径和叶片数在性能上的变化
Aeronautical Engineering
26.2K Views

机翼行为:克拉克Y-14翼上的压力分布
Aeronautical Engineering
21.0K Views

Clark Y-14 翼性能:高提升设备的部署(片和板条)
Aeronautical Engineering
13.3K Views

湍流球法:评估风洞流量质量
Aeronautical Engineering
8.7K Views

交叉圆柱流:测量压力分布和估计阻力系数
Aeronautical Engineering
16.1K Views

喷嘴分析:沿聚合和融合分流喷嘴的马赫数和压力的变化
Aeronautical Engineering
37.8K Views

施利伦成像:一种可视化超音速流特性的技术
Aeronautical Engineering
11.4K Views

水隧道中的流量可视化:在三角洲翼上观察前沿涡流
Aeronautical Engineering
8.0K Views

表面染料流可视化:观察超音速流中条纹模式的定性方法
Aeronautical Engineering
4.9K Views

皮托静态管:测量气流速度的设备
Aeronautical Engineering
48.7K Views

恒温测量:研究湍流边界层流的工具
Aeronautical Engineering
7.2K Views

压力传感器:使用皮托静态管进行校准
Aeronautical Engineering
8.5K Views

实时飞行控制:嵌入式传感器校准和数据采集
Aeronautical Engineering
10.2K Views
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。