
Estabilidade de Embarcações Flutuantes
Visão Geral
Fonte: Alexander S Rattner e Kevin Rao Li Departamento de Engenharia Mecânica e Nuclear, Universidade Estadual da Pensilvânia, University Park, PA
O objetivo deste experimento é demonstrar o fenômeno da estabilidade dos vasos flutuantes - a capacidade de auto-direita quando rolado para o lado por alguma força externa. O design cuidadoso das formas do casco e da distribuição interna de massa permite que os navios marítimos sejam estáveis com rascunhos baixos (profundidade submersa do casco), melhorando a manobrabilidade do vaso e reduzindo o arrasto.
Neste experimento, um barco modelo será primeiro modificado para permitir o ajuste de seu centro de massa (representando diferentes cargas) e o rastreamento automatizado de seu ângulo de rolo. O barco será colocado em um recipiente de água, e inclinado para diferentes ângulos com diferentes alturas de seu centro de massa. Uma vez liberado, o movimento de capotamento (tombamento) ou oscilante do barco será rastreado com um software de câmera digital e análise de vídeo. Os resultados para o ângulo máximo estável e a frequência de oscilação serão comparados com os valores teóricos. Os cálculos de estabilidade serão realizados utilizando propriedades geométricas e estruturais do barco determinadas em um ambiente de design auxiliado por computador.
Princípios
A força flutuante, que suporta navios flutuantes, é igual ao peso do fluido deslocado pela porção submersa de tais vasos. A força flutuante atua para cima, ao longo da linha vertical passando pelo centroide (centro de volume) deste volume submerso. Este ponto é chamado de centro de flutuação. Se o centro de massa de uma estrutura flutuante estiver abaixo do seu centro de flutuação, qualquer rolamento lateral (movimentode salto) dará um momento para corrigir a estrutura, devolvendo-a à orientação vertical (Fig. 1a). Se o centro de massa estiver acima do centro da flutuação, a estrutura pode ser instável, fazendo com que ela se virou se perturbada (Fig. 1b). No entanto, se o casco de um navio flutuante for projetado cuidadosamente, ele pode ser estável, mesmo que seu centro de massa esteja acima de seu centro de flutuação. Aqui, derrubar o vaso ligeiramente faz com que a forma de seu volume submerso mude, deslocando seu centro de flutuação para fora na direção do tombamento. Isso resulta em um momento de redocimento líquido, desde que a linha de ação da flutuação esteja fora do centro de massa da estrutura (Fig. 1c). Equivalentemente, um navio será estável se o ponto de intersecção da linha de ação da flutuação e a linha central do casco (metacentro) estiver acima de seu centro de massa. Alguns vasos são metastíveis - apenas auto-resm direito até algum ângulo crítico.
Também é importante considerar o comportamento dinâmico de uma embarcação flutuante. Impulsos fortes de ondas podem fazer com que um barco gire além de seu limite metastável, mesmo que o ângulo inicial de tombamento seja pequeno (ou seja,  grande para
grande para  pequenos). A frequência e amplitude da oscilação também podem afetar o conforto do passageiro. O movimento rotacional de uma nave pode ser previsto com um momento de equilíbrio sobre seu centro de massa. Aqui, euzz é o momento de inércia sobre o centro de massa, φ é o ângulo de rolo, m é a massa do navio, e Lcm,mc é a distância ao longo da linha central do barco de seu centro de massa para seu metacentro.
pequenos). A frequência e amplitude da oscilação também podem afetar o conforto do passageiro. O movimento rotacional de uma nave pode ser previsto com um momento de equilíbrio sobre seu centro de massa. Aqui, euzz é o momento de inércia sobre o centro de massa, φ é o ângulo de rolo, m é a massa do navio, e Lcm,mc é a distância ao longo da linha central do barco de seu centro de massa para seu metacentro.
 (1)
(1)

Figura 1: a. Embarcação estável com centro de massa abaixo do centro da flutuação, garantindo o momento de direita. b. Navio instável com centro de massa acima do centro de flutuação. c. Forma de casco que faz com que o centro da flutuação aja fora do centro de massa (metacentro acima do centro de massa). Isso gera estabilidade mesmo com o centro de massa acima do centro da flutuação.
Procedimento
1. Medir o ângulo máximo de estabilidade
- Selecione um pequeno barco modelo. Recomenda-se um design de casco relativamente simples para reduzir a complexidade da análise nas Seções 3 e 4.
- Conecte um mastro vertical leve de cor brilhante ao barco (azul recomendado). O código MATLAB fornecido rastreia a posição do mastro no vídeo procurando pixels azuis brilhantes na imagem. Se um mastro de cor diferente for usado, o código de análise de imagem terá que ser ajustado de acordo.
- Fixar uma gravata de cabo no mastro para agir como uma parada para um peso. Deslize um peso (por exemplo,porca de acoplamento) no mastro para que ele repouse na parada.
- Coloque o barco em um recipiente maior de água, e deixe-o assentar (Fig. 2a). Posicione a configuração para que o fluxo de ar na sala não perturbe o barco. Monte uma câmera de vídeo voltada para o mastro ao longo do comprimento do barco. Recomenda-se um pano de fundo branco.
- Colete um vídeo de referência do barco em repouso e analise-o usando a função MATLAB fornecida(TrackMast.m). Ajuste a orientação da câmera até que ela leia corretamente 0-inclinação quando o barco estiver em repouso. Você pode precisar ajustar os parâmetros de mascaramento para isolar o mastro na linha 17 do código.
- Colete vídeos de muito gradualmente derrubando o barco pressionando de lado na parte superior do mastro até que ele caia por conta própria (capsizes). Mantenha o mastro no quadro de vídeo o maior tempo possível durante cada teste. Realize este procedimento para diferentes alturas do peso. Regissuça a altura do peso no mastro para cada caso.
- Analise esses vídeos usando o script MATLAB fornecido. Para cada caso, o ângulo máximo estável pode ser determinado pela inspeção do ângulo de saída e dos matrizes de tempo. Complete uma tabela de ângulo de tamanho de tamanho versus altura de peso.
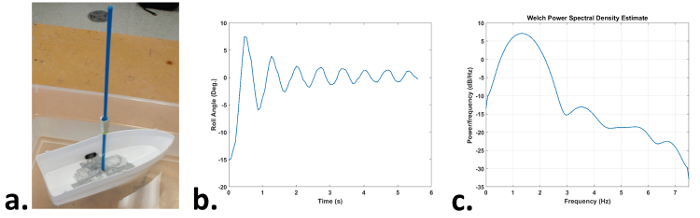
Figura 2: a. Barco modelo com peso ajustável no mastro, b. Enrolar variação de ângulo com quando liberado de ângulo leve (Passo 2.1), c. Gráfico de densidade de espectro de potência de (b) mostrando a frequência de oscilação máxima de 1,4 Hz Por favor clique aqui para ver uma versão maior desta figura.
2. Medir a frequência de oscilação
- Realize um segundo conjunto de experimentos de tombamento com duas alturas diferentes de peso de mastro. Desta vez, basta virar o barco ligeiramente (~10°), e coletar vídeos do barco de balanço por 10 a 15 s.
- Reexploda a função de rastreamento de mastro no vídeo. Após chamar a função, avalie a seguinte expressão MATLAB na saída: pwelch(theta,[],[],[],[],1/(t(2)-t(1)) ); . Isso irá traçar a densidade do espectro de energia para o barco de balanço. A frequência de rolamento primária é o valor máximo nesta parcela (Fig. 2b-c).
3. Previsão do ângulo de tombamento
- Usando uma balança, meça a massa do barco modelo, incluindo o mastro e o peso.
- Para cada posição do peso do mastro avaliado na Etapa 1.5, equilibre o barco de lado com o mastro em uma borda reta. Regissuça a altura do ponto de equilíbrio a partir da parte inferior do casco como o centro de massa (Hcm).
- Usando um pacote de software CAD, crie um modelo em escala do barco e mastro com peso. Certifique-se de que o casco esteja preenchido (sólido) neste modelo (Fig. 3a).
- Posicione o modelo de modo que a linha central do casco inferior (quilha) seja coincidência com a origem no ambiente CAD e o mastro seja (inicialmente) paralelo com o eixo vertical (y).
- No ambiente CAD, gire o barco sobre o eixo z, que fica ao longo do comprimento do casco, em pequenos incrementos (por exemplo, 5°, 10°, 15°...).
- Após cada rotação, corte todo o barco acima de um nível vertical de modo que o volume da porção inferior restante seja igual à massa total do barco dividida pela densidade de água (m/ ρw, ρw = 1000 kg m-3). Isso representa a porção do barco abaixo da linha d'água quando ele está flutuando nesse ângulo (Fig. 3b).
- Utilizando o recurso "Propriedades de Massa" no software CAD, avalie a posição x do centroid do casco restante. Aqui, a origem deve ser ao longo da borda mais baixa do javali (a quilha), e o eixo x deve apontar na direção horizontal. Isso representa o centro da flutuação (xb); a força flutuante age através deste ponto. Prepare uma tabela de xcm vs. φ.
- Para cada ângulo máximo estável(φ)identificado na Etapa 1.6, compare o braço momentâneo do peso do barco
 e o braço momentâneo da força flutuante restauradora (
e o braço momentâneo da força flutuante restauradora (  ). Você pode precisar interpolar entre os valores obtidos na Etapa 3.7. Esse equilíbrio é aproximadamente?
). Você pode precisar interpolar entre os valores obtidos na Etapa 3.7. Esse equilíbrio é aproximadamente?
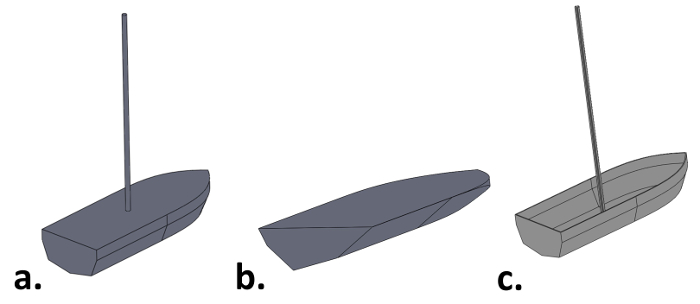
Figura 3: a. Preenchido no modelo do casco do barco, b. Corte vertical do casco, revelando o volume submerso do navio, c. Modelo fisicamente preciso da embarcação.
4. Prever o período de oscilação
- Produzir um segundo modelo CAD do barco com a posição do peso correspondente aos casos na Etapa 2.1. Desta vez modele a espessura real do casco (ou seja,não preenchido, Fig. 3c). Combine a densidade dos materiais com valores reais.
- Utilizando o recurso cad software "Mass Properties", avalie o momento de inércia do barco sobre seu centro de massa ao longo do eixo de rolo (Izz) para as alturas de peso.
- Utilizando resultados das etapas anteriores e da posição xdo centro de flutuação medida quando
 (Passo 3.7), avaliar as frequências teóricas de oscilação:
(Passo 3.7), avaliar as frequências teóricas de oscilação: (2)
(2) - Compare o resultado teórico da Etapa 4.3 com as frequências de oscilação medidas. Esses valores concordam razoavelmente bem?
Resultados
| Massa total (m,kg) |
Centro de massa (Hcm,m) |
Centro de flutuação (  , m) , m)
|
Momento da Inércia (Izz, kg m2) |
| 0.088 (Passo 3.1) |
0.053 (Passo 3.2) |
0.0078 (Passo 3.7) |
0.00052 (Passo 4.2) |
Mesa 1. Propriedades do barco modelo com peso de 24 g posicionadas 13 cm acima da quilha.
| Etapa do procedimento | Valor Experimental | Valor previsto |
| Ângulo máximo estável de rolo (1,6, 3,8) | ~25° | 28,5° |
| Frequência de rolo natural (2.2, 4.3) | 1,4 Hz | 1,24 Hz |
Mesa 2. Ângulo máximo estável e frequência de rolamento do barco com peso de 24 g 13 cm acima da quilha.
Aplicação e Resumo
Este experimento demonstrou os fenômenos de estabilidade dos navios flutuantes e como os navios podem permanecer eretos mesmo com centros de massa relativamente altos. Por exemplo, nos resultados representativos, um pequeno barco modelo com um centro de massa (Hcm = 5,3 cm) bem acima da linha de água ( linha h deágua ~ 1 - 2 cm) poderia retornar à sua posição vertical depois de ser inclinado para um ângulo ~25°. Nos experimentos, o ângulo máximo estável foi medido para um barco modelo com diferentes centros verticais de massa. Também foi avaliado o efeito do centro da altura da massa na frequência de oscilação (rolamento). Ambas as medidas foram comparadas com os valores teóricos obtidos utilizando parâmetros geométricos em embalagens CAD. Esses resultados e procedimentos podem servir de ponto de partida para os alunos que buscam projetar e analisar estruturas flutuantes.
A propriedade da estabilidade é crucial para o projeto e operação de embarcações marítimas. Navios que operam com rascunhos rasos (a maior parte do navio acima da água) reduziram o arrasto e aumentaram a manobrabilidade. Em grandes navios de carga, os contêineres de transporte podem ser empilhados acima do convés superior, aumentando a capacidade de carga e facilitando as operações de carga e descarga. Em navios de cruzeiro, rascunhos rasos permitem muitas janelas e decks para passageiros. Embora a estabilidade seja fundamental para a segurança, formas muito estáveis do casco (alta  ) produzem frequências de balanço rápido (Eqn. 2), que podem ser desconfortavelmente snappy para os passageiros. As análises de estabilidade hidrostática, como demonstrado neste experimento, são, portanto, ferramentas cruciais para orientar a engenharia marinha.
) produzem frequências de balanço rápido (Eqn. 2), que podem ser desconfortavelmente snappy para os passageiros. As análises de estabilidade hidrostática, como demonstrado neste experimento, são, portanto, ferramentas cruciais para orientar a engenharia marinha.
Tags
Pular para...
Vídeos desta coleção:

Now Playing
Estabilidade de Embarcações Flutuantes
Mechanical Engineering
23.1K Visualizações

Empuxo e Arrasto em Corpos Imersos
Mechanical Engineering
30.2K Visualizações

Propulsão e Impulso
Mechanical Engineering
22.1K Visualizações

Redes de tubulação e perdas de pressão
Mechanical Engineering
58.7K Visualizações

Resfriamento e Ebulição
Mechanical Engineering
8.2K Visualizações

Saltos Hidráulicos
Mechanical Engineering
41.3K Visualizações

Análise de Trocadores de Calor
Mechanical Engineering
28.3K Visualizações

Introdução à Refrigeração
Mechanical Engineering
25.0K Visualizações

Anemometria com fio quente
Mechanical Engineering
15.8K Visualizações

Medindo fluxos turbulentos
Mechanical Engineering
13.6K Visualizações

Visualização do Fluxo ao Redor de um Corpo Parado
Mechanical Engineering
12.1K Visualizações

Jato Incidindo em uma Placa Inclinada
Mechanical Engineering
10.8K Visualizações

Abordagem de Conservação de Energia para Análise de Sistemas
Mechanical Engineering
7.4K Visualizações

Conservação de Massa e Medições de Taxa de Fluxo
Mechanical Engineering
22.9K Visualizações

Determinação das Forças de Impacto em uma Placa Plana com o Método do Volume de Controle
Mechanical Engineering
26.0K Visualizações
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados