
Estabilidad de los buques flotantes
Visión general
Fuente: Alexander S Rattner y Kevin Rao Li Departamento de mecánica y la Ingeniería Nuclear, la Universidad Estatal de Pensilvania, University Park, PA
El objetivo de este experimento es demostrar el fenómeno de la estabilidad de los buques flotantes - la capacidad de uno mismo-a la derecha cuando al lado por alguna fuerza externa. Cuidadoso diseño de formas del casco y distribución interna de masas permite buques de alta mar sea estable con bajas corrientes de aire (profundidad sumergida del casco), mejorar la maniobrabilidad de la embarcación y la reducción de arrastren.
En este experimento, un barco modelo primero se modificará para permitir el ajuste de su centro de masa (que representan cargas diferentes cargas) y automatizado de seguimiento de su ángulo del rodillo. El barco se coloca en un recipiente de agua y con puntas de diferentes ángulos con diferentes alturas de su centro de masa. Una vez liberada, la zozobra (vuelco) u oscilante movimiento del barco se realizar un seguimiento con una cámara digital y software de análisis de vídeo. Resultados para el establo máximo ángulo del rodillo y frecuencia de la oscilación se compararán con los valores teóricos. Cálculos de estabilidad se realizará utilizando propiedades geométricas y estructurales de la embarcación determinada en un entorno de diseño asistido por ordenador.
Principios
La fuerza boyante, que admite barcos flotantes, es igual al peso del líquido desplazado por la porción sumergida de dichos buques. La fuerza de empuje actúa hacia arriba, a lo largo de la línea vertical que pasa por el centroide (centro del volumen) del volumen sumergido. Este punto se llama centro de flotación. Si el centro de masa de una estructura flotante está por debajo de su centro de flotabilidad, cualquier lado (inclinación movimiento de balanceo) impartirá un momento a la derecha la estructura, volviendo a la orientación vertical (Fig. 1a). Si el centro de masa está sobre el centro de flotabilidad, la estructura puede ser inestable, causando zozobra si perturbado (Fig. 1b). Sin embargo, si el casco de un buque flotante se diseña cuidadosamente, puede ser estable, aunque su centro de masa está por encima de su centro de flotación. Aquí, inclinando ligeramente el vaso hace que la forma de su volumen sumergido a cambiar, cambiando su centro de flotabilidad hacia fuera en el sentido de vuelco. Esto resulta en un momento neto corregir como la línea de acción de la flotabilidad está fuera del centro de masa de la estructura (Fig. 1 c). Equivalente, un buque será estable si el punto de intersección de la línea de acción de la flotabilidad y la línea central del casco (metacenter) está por encima de su centro de masa. Algunos recipientes son metaestables - self-righting hasta un ángulo crítico.
También es importante considerar el comportamiento dinámico de un buque flotante. Fuertes impulsos de ondas pueden causar un barco a girar más allá de su límite metaestable, incluso si el ángulo de inclinación inicial es pequeño (es decir,  grande para el pequeño
grande para el pequeño  ). La frecuencia y la amplitud de la oscilación también pueden afectar el confort de los pasajeros. El movimiento de rotación de un buque puede predecirse con un balance de momento sobre su centro de masa. Aquí, zz es el momento de inercia sobre el centro de masa, θ es el ángulo del rodillo, m es la masa del vaso y Lcm, mc es la distancia sobre la línea central del barco de su centro de masa a su metacenter.
). La frecuencia y la amplitud de la oscilación también pueden afectar el confort de los pasajeros. El movimiento de rotación de un buque puede predecirse con un balance de momento sobre su centro de masa. Aquí, zz es el momento de inercia sobre el centro de masa, θ es el ángulo del rodillo, m es la masa del vaso y Lcm, mc es la distancia sobre la línea central del barco de su centro de masa a su metacenter.
 (1)
(1)

Figura 1: a. recipiente estable con el centro de masa por debajo del centro de flotabilidad, asegurando el momento adrizante. b. nave inestable con centro de masa sobre el centro de flotabilidad. c. forma casco que hace que el centro de flotabilidad que actúa fuera del centro de masa (metacenter sobre el centro de masa). Esto produce estabilidad incluso con el centro de la masa sobre el centro de la flotabilidad.
Procedimiento
1. medir el ángulo máximo de estabilidad
- Seleccione un barco pequeño. Se recomienda un diseño de casco relativamente simple para reducir la complejidad del análisis en las secciones 3 y 4.
- Conecte un mástil vertical ligero de colores brillantes para el barco (azul recomendado). El código MATLAB de proporcionado pistas la posición del mástil en el video buscando píxeles azul brillantes de la imagen. Si se utiliza un mástil de color diferente, el código de análisis de imagen tendrá que ajustarse en consecuencia.
- Pegue firmemente un atador de cable en el mástil como una parada para un peso. Deslice un peso (por ejemplo, la tuerca de acoplamiento) sobre el mástil para que apoye sobre el tope.
- Colocar el barco en un contenedor más grande de agua y déjelo asentarse (Fig. 2a). Colocar la configuración del flujo de aire en la habitación no disturba el barco. Montaje de una cámara de video hacia el mástil a lo largo de la longitud del barco. Se recomienda un fondo blanco.
- Recoge un video de referencia del barco en reposo y analizarlo utilizando la función proporcionada de MATLAB (TrackMast.m). Ajuste la orientación de la cámara hasta que lee correctamente 0 de inclinación cuando el barco está en reposo. Puede que necesite ajustar los parámetros de enmascaramiento para aislar el mástil en la línea 17 del código.
- Recoge vídeos de vuelco muy poco a poco el barco pulsando hacia los lados en la parte superior del mástil hasta que cae su propia (zozobra). Mantener el mástil en el fotograma de vídeo tan largo como sea posible durante cada examen. Realizar este procedimiento para las diferentes alturas del peso. Registro de la altura del peso en el mástil para cada caso.
- Analizar estos videos usando el script MATLAB suministrado. Para cada caso, el ángulo máximo estable se puede determinar por la inspección de los arreglos de tiempo y ángulo de salida. Completa una tabla de ángulo de vuelco vs peso estatura.
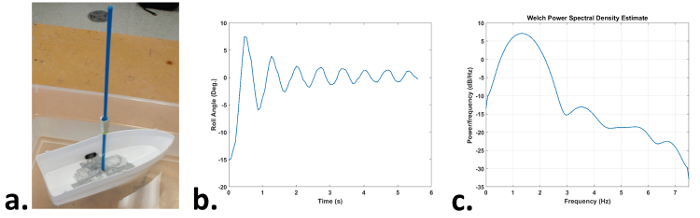
Figura 2 : a. modelo de barco con peso ajustable en mástil, b. variación de ángulo del rodillo con cuando liberado de pequeño ángulo (paso 2.1), c. energía espectro densidad trama (b) que muestra la frecuencia de oscilación de pico de 1,4 Hz por favor haga clic aquí para ver una versión más grande de este figura.
2. medir la frecuencia de oscilación
- Realizar una segunda serie de experimentos con dos alturas de mástil-peso de vuelco. Esta vez, solamente punta barco ligeramente (~ 10°) y recopilar videos del barco oscilante para s 10-15.
- Vuelva a ejecutar el mástil el seguimiento de la función en el video. Después de llamar a la función, evaluar la siguiente expresión de MATLAB en la salida: pwelch (theta, [], [], [], 1/(t(2)-t(1))). Esta trama de la densidad del espectro de energía para el barco oscilante. La frecuencia de balanceo principal es el valor más alto en este terreno (Fig. 2b-c).
3. predicción del ángulo de inclinación
- Usando una escala, medir la masa del barco modelo, incluyendo el mástil y el peso.
- Para cada posición del mástil peso evaluado en paso 1.5, equilibrar el barco en su lado con el mástil en un borde recto. Registrar la altura del punto de equilibrio de la parte inferior del casco como el centro de masaH(cm).
- Con un paquete de software de CAD, crear un modelo a escala del barco y mástil con peso. Asegúrese de que el casco esté lleno (sólido) en este modelo (Fig. 3a).
- Coloque el modelo de modo que la línea de crujía del casco inferior (quilla) es coincidente con el origen en el entorno de la CAD y el mástil es (inicialmente) paralelo con el eje vertical (y).
- En el entorno de la CAD, girar el barco sobre el eje z, que es a lo largo de la longitud del casco, en pequeños incrementos (p. ej., 5°, 10°, 15°...).
- Después de cada rotación, corte todo el barco sobre una vertical nivel tal que el volumen de la parte inferior restante equivale a la embarcación total masa dividida por la densidad del agua (m / ρw, ρw = 1000 kg m-3). Esto representa la parte del barco por debajo de la línea de agua cuando está flotando en ese ángulo (Fig. 3b).
- Mediante la función de "Mass Properties" en el software de CAD, evaluar la posición x del centroide del casco restante. Aquí, el origen debe estar en el borde más bajo de la boal (la quilla), y el eje x debe apuntar en la dirección horizontal. Esto representa el centro de flotabilidad (xb); la fuerza de empuje actúa a través de este punto. Preparar una tabla de xcm vs θ.
- Para cada ángulo estable máximo (θ) identificado en 1.6 de paso, comparar el brazo de momento del peso del barco (
 ) y el brazo de momento de la restauración fuerza de flotación (
) y el brazo de momento de la restauración fuerza de flotación ( ). Puede que necesite interpolar entre los valores obtenidos en el paso 3.7. ¿Estos balance aproximadamente?
). Puede que necesite interpolar entre los valores obtenidos en el paso 3.7. ¿Estos balance aproximadamente?
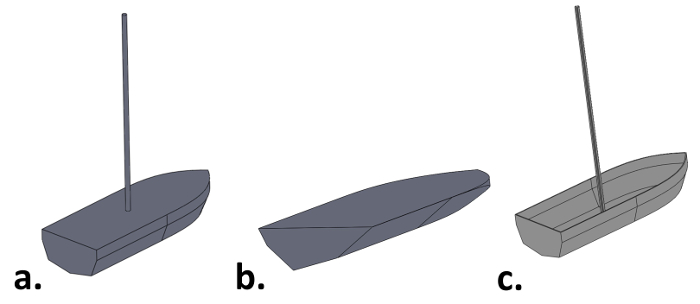
Figura 3 : a. llenado en modelo del casco del barco, b. corte Vertical del casco, revelando el volumen sumergido del barco, modelo físicamente exacta c. del buque.
4. predecir el período de oscilación
- Producir un segundo modelo CAD del barco con la posición del peso correspondiente a los casos en el paso 2.1. Esta vez modelo el espesor real del casco (es decir, no llenado en, Fig. 3C). Coincide con la densidad de los materiales con valores reales.
- Mediante la función de "Mass Properties" de software de CAD, evaluar el momento de inercia del barco sobre su centro de masa en el eje del rodillo (zz) para las alturas de peso.
- Utilizando los resultados de los pasos anteriores y el x-posición del centro de flotabilidad cuando mide
 (paso 3.7), evaluar las frecuencias de oscilación teórica:
(paso 3.7), evaluar las frecuencias de oscilación teórica: (2)
(2) - Comparar el resultado teórico de paso 4.3 con las frecuencias de oscilación medido. ¿Estos valores concuerdan razonablemente bien?
Resultados
| Masa total (m, kg) |
Centro de masa (Hcm, m) |
Centro de flotabilidad (  , m) , m)
|
Momento de inercia (Zz, kg m2) |
| 0.088 (Paso 3.1) |
0.053 (Paso 3.2) |
0.0078 (Paso 3.7) |
0.00052 (Paso 4.2) |
Tabla 1. Propiedades de bote modelo con 24 g de peso colocan 13 cm por encima de la quilla.
| Procedimiento paso | Valor experimental | Valor predicho |
| Ángulo máximo de rollo estable (1.6, 3.8) | ~ 25° | 28,5° |
| Frecuencia natural rollo (2.2, 4.3) | 1.4 Hz | 1.24 Hz |
Tabla 2. Máximo estable roll ángulo y frecuencia de balanceo del barco con 24 g de peso 13 cm por encima de la quilla.
Aplicación y resumen
Este experimento demostró los fenómenos de estabilidad de los buques flotantes y cómo naves pueden quedarse incluso con centros de masa relativamente elevada. Por ejemplo, en los resultados representativos, un modelo pequeño barco con un centro de masa (Hcm = 5,3 cm) muy por encima de la línea de agua (Hagua línea ~ 1-2 cm) podría volver a su posición vertical después de ser inclinado a un ángulo de ~ 25 °. En los experimentos, se midió el ángulo máximo estable para un barco modelo con diferentes centros de masa vertical. También se evaluó el efecto de la altura del centro de masa en la frecuencia de oscilación (balanceo). Ambas mediciones se compararon con los valores teóricos obtenidos mediante parámetros geométricos en paquetes de CAD. Estos resultados y los procedimientos pueden servir como punto de partida para estudiantes que buscan diseñar y analizar estructuras flotantes.
La propiedad de estabilidad es fundamental para el diseño y operación de buques de alta mar. Buques que operan con corrientes poco profundas (la mayoría de la embarcación sobre el agua) han reducido la fricción y mayor maniobrabilidad. En los buques de carga, contenedores pueden apilarse alto encima de la cubierta superior, aumentando la capacidad de carga y facilitar las operaciones de carga y descarga. En las naves de travesía, bosquejos poco profundos permiten muchas ventanas y cubiertas para pasajeros. Mientras que la estabilidad es crítica para la seguridad, formas de casco muy estable (alta  ) rendimiento de balanceo rápido frecuencias (ecuación. 2), que pueden ser incómodo ágil para los pasajeros. Análisis de estabilidad hidrostática, según lo demostrado en este experimento, son herramientas cruciales para guiar ingeniería marina.
) rendimiento de balanceo rápido frecuencias (ecuación. 2), que pueden ser incómodo ágil para los pasajeros. Análisis de estabilidad hidrostática, según lo demostrado en este experimento, son herramientas cruciales para guiar ingeniería marina.
Tags
Saltar a...
Vídeos de esta colección:

Now Playing
Estabilidad de los buques flotantes
Mechanical Engineering
23.3K Vistas

Flotabilidad y arrastre en cuerpos sumergidos
Mechanical Engineering
30.2K Vistas

Propulsión y empuje
Mechanical Engineering
22.1K Vistas

Redes de tuberías y pérdidas de presión
Mechanical Engineering
58.8K Vistas

Enfriamiento y ebullición
Mechanical Engineering
8.2K Vistas

Saltos hidráulicos
Mechanical Engineering
41.3K Vistas

Análisis del intercambiador de calor
Mechanical Engineering
28.3K Vistas

Introducción a la refrigeración
Mechanical Engineering
25.0K Vistas

Anemometría de hilo caliente
Mechanical Engineering
15.9K Vistas

Medición de flujos turbulentos
Mechanical Engineering
13.6K Vistas

Visualización de flujo más allá de un cuerpo no fuselado
Mechanical Engineering
12.2K Vistas

Jet que inciden sobre una placa inclinada
Mechanical Engineering
10.8K Vistas

Enfoque de conservación de la energía para el análisis de sistemas
Mechanical Engineering
7.4K Vistas

Conservación de masa y mediciones de tasa de flujo
Mechanical Engineering
23.0K Vistas

Determinación de las fuerzas de impacto en una placa plana con el método del control del volumen
Mechanical Engineering
26.0K Vistas
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados