Aerodinâmica de Multicópteros: Caracterizando o Empuxo em um Hexacóptero
Visão Geral
Fonte: Prashin Sharma e Ella M. Atkins, Departamento de Engenharia Aeroespacial, Universidade de Michigan, Ann Arbor, MI
Multicopters estão se tornando populares para uma variedade de hobby e aplicações comerciais. Eles são comumente disponíveis como configurações quadcopter (quatro propulsores), hexacopter (seis propulsores) e octocopter (oito propulsores). Aqui, descrevemos um processo experimental para caracterizar o desempenho multicóptero. Uma pequena plataforma modular de hexacopter que fornece redundância de unidade de propulsão é testada. O impulso do motor estático individual é determinado usando um dinamômetro e diferentes comandos de hélice e entrada. Este impulso estático é então representado em função do motor RPM, onde o RPM é determinado a partir da potência do motor e da entrada de controle. O hexacóptero é então montado em um suporte de teste de célula de carga em um túnel de vento de 5' x 7' de baixa velocidade, e seus componentes aerodinâmicos de elevação e força de arrasto foram caracterizados durante o voo em diferentes sinais motores, velocidade de fluxo livre e ângulo de ataque.
Um hexacóptero foi selecionado para este estudo devido à sua resiliência à falha motora (unidade de propulsão), conforme relatado no Clothier1. Juntamente com a redundância no sistema de propulsão, a seleção de componentes de alta confiabilidade também é necessária para um voo seguro, particularmente para missões sobrepovoadas. Em Ampatis2,os autores discutem a seleção ideal de peças multicopter, como motores, lâminas, baterias e controladores eletrônicos de velocidade. Pesquisas semelhantes também foram relatadas em Bershadsky3, que se concentra na seleção adequada de um sistema de hélice para satisfazer os requisitos da missão. Juntamente com a redundância e confiabilidade dos componentes, entender o desempenho do veículo também é essencial para garantir que os limites do envelope de voo sejam respeitados e selecionar o design mais eficiente.
Princípios
Um multicóptero é um veículo aéreo que tem vários rotores em comparação com helicópteros tradicionais, que têm um único rotor principal. Um rotor de helicóptero tradicional tem tom variável, o que permite ao piloto controlar o elevador e a direção. Em contraste, os multicopters dependem de rotores de campo fixo e usam variações na velocidade do motor para o controle do veículo.
Uma variedade de diferentes configurações multicópteros surgiram, como quadcopters com quatro rotores, hexacópteros com seis rotores e octocópteros com oito rotores. Normalmente, os multicópteros têm um número igual de hélices de campo fixo no sentido horário (CW) e anti-horário (CCW), e variações na velocidade dos rotores resultam nas seguintes rotações em 3D durante o voo:
- Yaw – rotação sobre o eixo vertical, resultando em uma mudança de ângulo de posição
- Rolo – rotação sobre o eixo apontando para a frente do veículo, resultando em movimento lado a lado
- Pitch – rotação sobre o eixo que corre da esquerda para a direita, resultando em um movimento de inclinação para frente e para trás
Multicopters, incluindo hexacópteros, podem ser controlados para manter o voo estável em relação aos seguintes graus de liberdade:
- Hover – Todas as hélices são operadas aproximadamente na mesma velocidade e, portanto, produzem aproximadamente o mesmo impulso. Uma vez que todas as hélices são igualmente espaçadas a partir do centro de gravidade, o impulso das hélices não produz torque rotativo líquido na aeronave. Além disso, o hexacóptero usa três hélices rotativas no sentido horário (CW) e três hélices rotativas no sentido anti-horário (CCW) para que o torque da hélice seja cancelado quando estiverem operando em velocidades iguais. Em hover, o impulso total para cima equilibra a força gravitacional descendente, e o multicóptero mantém ângulos de tom e rolo zero em condições de vento zero (arrasto).
- Controle de rolo – Um hexacopter pode ser controlado sobre seu eixo de rolagem aumentando a velocidade das hélices de um lado e diminuindo a velocidade das hélices do outro lado. Quando o aumento de impulso de um lado é o mesmo que a diminuição do impulso no lado oposto, o impulso líquido permanece o mesmo. Da mesma forma, o efeito líquido do torque permanece o mesmo.
- Controle de arremesso – Para um hexacóptero, o controle de campo é análogo ao controle de rolagem. O diferencial de impulso entre hélices dianteiras e traseiras faz com que o hexacóptero se lance; se o impulso for aumentado nas hélices traseiras e diminuído nas hélices dianteiras, o hexacopter avança.
- Controle de Guinada – O controle da Yaw é conseguido equilibrando os torques rotacionais da hélice no sentido horário com os torques rotacionais da hélice no sentido anti-horário. Girando as hélices no sentido anti-horário mais rápido do que as hélices no sentido horário (ou vice-versa), a reação da rede oposta no hexacóptero induz uma rotação na guinada.
Um novo resumo da física do hexacóptero é descrito abaixo.
Parâmetros do motor
Um modelo de parâmetro agrupado como por Bangura4 é usado para especificar o impulso e o torque de cada unidade do propulsor do motor/hélice:
 (1)
(1)
 (2)
(2)
onde  está o impulso gerado, é o torque do
está o impulso gerado, é o torque do  motor, é o
motor, é o  coeficiente de impulso,
coeficiente de impulso,  é o coeficiente momento e
é o coeficiente momento e  é a velocidade rotacional do motor em RPM (revoluções por minuto). A potência e a eficiência do motor podem ser calculadas a partir das seguintes equações:
é a velocidade rotacional do motor em RPM (revoluções por minuto). A potência e a eficiência do motor podem ser calculadas a partir das seguintes equações:
 (3)
(3)
 (4)
(4)
 (5)
(5)
onde  está a energia mecânica gerada, é a entrada de energia elétrica na
está a energia mecânica gerada, é a entrada de energia elétrica na  tensão e corrente , e
tensão e corrente , e  é a eficiência do
é a eficiência do 
 motor.
motor.  são experimentalmente determinados usando os dados obtidos a partir de experimentos de dinamômetro.
são experimentalmente determinados usando os dados obtidos a partir de experimentos de dinamômetro.
Dinâmica hexacóptero
A dinâmica de um hexacóptero, conforme descrito em Ducard5 e Powers6,baseia-se nos quadros de referência ilustrados na Figura 1, onde o eixo ortoonórmemal representado por  representar um quadro de coordenadas mundiais com origem em
representar um quadro de coordenadas mundiais com origem em  . O quadro de coordenadas do mundo é um quadro fixo com todos os outros quadros definidos em relação a ele, tornando conveniente expressar a tradução e cinemática rotacional de um hexacopter. A estrutura de coordenadas do corpo, dada
. O quadro de coordenadas do mundo é um quadro fixo com todos os outros quadros definidos em relação a ele, tornando conveniente expressar a tradução e cinemática rotacional de um hexacopter. A estrutura de coordenadas do corpo, dada  por
por  origem, está localizada no centro de gravidade (CG) para o hexacóptero e é definida em relação ao quadro mundial; eixos de estrutura corporal são fixados ao hexacóptero. A estrutura coordenada do corpo é usada para definir a direção do impulso gerado pelo hexacóptero. Normalmente, para veículos aéreos, uma estrutura de vento também é definida com sua origem no veículo CG. O quadro de vento é usado para expressar as forças aerodinâmicas e momentos que atuam no hexacóptero. No entanto, para efeitos deste experimento, consideramos o quadro de imagens do mundo e o quadro do vento como idênticos porque o fluxo no túnel de vento é sempre horizontal; para obter mais informações sobre os quadros de referência da aeronave, consulte McClamroch7.
origem, está localizada no centro de gravidade (CG) para o hexacóptero e é definida em relação ao quadro mundial; eixos de estrutura corporal são fixados ao hexacóptero. A estrutura coordenada do corpo é usada para definir a direção do impulso gerado pelo hexacóptero. Normalmente, para veículos aéreos, uma estrutura de vento também é definida com sua origem no veículo CG. O quadro de vento é usado para expressar as forças aerodinâmicas e momentos que atuam no hexacóptero. No entanto, para efeitos deste experimento, consideramos o quadro de imagens do mundo e o quadro do vento como idênticos porque o fluxo no túnel de vento é sempre horizontal; para obter mais informações sobre os quadros de referência da aeronave, consulte McClamroch7.
Em primeiro lugar, aqui está uma introdução à notação. L é o comprimento do braço de cada motor hexacóptero para o veículo centralizado no plano horizontal da carroceria, e a magnitude total do impulso motor é dada e age na estrutura da carroceria z-sentido. A magnitude do torque é dada  por um subscrito representando o eixo de referência da estrutura corporal.
por um subscrito representando o eixo de referência da estrutura corporal.  , e representar os
, e representar os 
 coeficientes de arrasto hexacóptero ao longo de cada vento respectivo ou equivalentemente eixo de quadro mundial,
coeficientes de arrasto hexacóptero ao longo de cada vento respectivo ou equivalentemente eixo de quadro mundial,  é a massa do hexacóptero, e
é a massa do hexacóptero, e  é aceleração gravitacional. Força total de impulso e torques rotacionais em termos de valores RPM do motor são dados por:
é aceleração gravitacional. Força total de impulso e torques rotacionais em termos de valores RPM do motor são dados por:
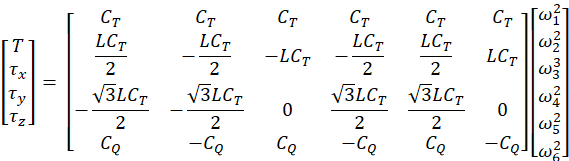 (6)
(6)
As equações de Newton de movimento linear no quadro do mundo podem então ser definidas como:
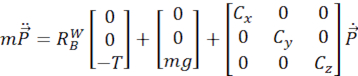 (7)
(7)
A matriz de rotação  é definida pela rotação Z-X-Y Euler Angle:
é definida pela rotação Z-X-Y Euler Angle:
 (8)
(8)
onde o ângulo de guinada (  ) é a rotação sobre o eixo Z, o ângulo de rolo ( ) é a rotação sobre o eixo
) é a rotação sobre o eixo Z, o ângulo de rolo ( ) é a rotação sobre o eixo  X, o ângulo de campo (
X, o ângulo de campo (  ) é a rotação sobre o eixo Y, e a notação taquigrafia,
) é a rotação sobre o eixo Y, e a notação taquigrafia,  é para cada ângulo.
é para cada ângulo.
Nestes experimentos, estamos apenas preocupados com forças aerodinâmicas agindo sobre o hexacóptero em movimento linear, mas para a completude na compreensão da dinâmica do hexacóptero, as equações de atitude do movimento são definidas abaixo. Primeiro, p é definido como velocidade angular sobre o eixo Xdo corpo, q é a velocidade angular sobre o eixo Ydo corpo, e r é a velocidade angular sobre o eixo Zdo corpo.
 (9)
(9)
 é a força ascendente aplicada pelo propulsor i, e eu sou o momento hexacóptero da matriz de inércia que pode ser determinada usando um pêndulo bifilar. Mais informações para este procedimento podem ser obtidas a partir de Quan8. As velocidades angulares do corpo e do quadro mundial estão relacionadas por:
é a força ascendente aplicada pelo propulsor i, e eu sou o momento hexacóptero da matriz de inércia que pode ser determinada usando um pêndulo bifilar. Mais informações para este procedimento podem ser obtidas a partir de Quan8. As velocidades angulares do corpo e do quadro mundial estão relacionadas por:
 (10)
(10)
Procedimento
Este protocolo caracteriza o impulso hexacóptero e a aerodinâmica. Para este experimento, utilizamos componentes disponíveis comercialmente, fora da prateleira para o hexacóptero, e os detalhes são fornecidos na Tabela 2. Para o controlador de voo, selecionamos um piloto automático de código aberto, Librepilot,9, pois ele forneceu flexibilidade para controlar comandos motormais individuais emitidos para o hexacóptero.
O suporte de teste para a montagem da célula de carga e do hexacóptero foi fabricado internamente usando compensado laminado e é mostrado na Figura 2. Ao projetar o suporte de teste, observe que ele deve permitir um ajuste preciso do ângulo de ataque do multicóptero e ser suficientemente rígido para suportar forças de dobra e vibrações criadas durante a operação dos motores.
Uma célula de carga de 6 eixos é montada no suporte de teste e conectada à placa de aquisição de dados, conforme mostrado na Figura 3. Forças aerodinâmicas e de impulso são sentidas na estrutura corporal do hexacóptero pela célula de carga. Os dados do medidor de tensão passam por um condicionador de sinal. A placa de aquisição de dados (DAQ) adquire então os componentes analógicos de força e torque usando um procedimento de calibração fornecido pelo fabricante da célula de carga. A placa DAQ então armazena esses valores em um buffer de alta velocidade e depois em disco permanente.
Para este protocolo, primeiro, determine as forças geradas pelos motores individuais. Em seguida, determine as forças que atuam na estrutura aérea nua, seguidas pela determinação das forças geradas por todo o hexacopter em função dos comandos de RPM motor. Emita os mesmos comandos RPM para todos os motores para cada teste.
1. Experimento do Dinamômetro
O dinamômetro permite a medição direta dos parâmetros, incluindo impulso, torque, RPM, tensão da bateria e corrente. Parâmetros como energia elétrica, potência mecânica e eficiência motora podem então ser derivados de Equações (3), (4) e (5).
- Conecte o dinamômetro ao computador DAQ usando um conector USB.
- Execute a interface gráfica do usuário (GUI) fornecida com o dinamômetro.
- Calibrar o dinamômetro seguindo as instruções fornecidas na tela. Use pesos e um braço de alavanca conhecido quando solicitado.
- Monte o motor no suporte de teste do dinamômetro.
- Fixar a hélice em uma configuração de puxador (trator), conforme mostrado na Figura 4.
- Conecte a bateria ao dinamômetro.
- Segure firmemente o dinamômetro na bancada usando grampos C.
- Execute o programa de entrada de passo e registe os parâmetros medidos, incluindo impulso, torque, RPM do motor, corrente do motor e modulação da largura de pulso (PWM) comando "acelerador".
2. Teste de impulso estático
- Aperte o hexacóptero no suporte de teste da célula de carga usando parafusos de montagem.
- Abra o Daq (Data Acquisition System, sistema de aquisição de dados) e execute o programa de viés de bitola de tensão da célula de carga.
- Conecte o controlador de voo hexacóptero ao computador usando um cabo micro USB e abra o software GCS (Ground Controller Station) da Estação de Controle terrestre.
- Conecte a fonte de alimentação ao hexacóptero.
- Selecione a guia Configuração -> Saída em GCS. Vincule todos os motores e verifique os testes ao vivo das saídas.
- Defina o comando do acelerador desejado para 1300 ms. Certifique-se de que você pode operar todos os motores com o mesmo comando pwm acelerador.
- Deixe o sistema estabilizar por vários segundos e, em seguida, execute o programa DAQ para coletar dados da célula de carga.
- Após a coleta de dados ser concluída, pare os motores.
- Repita os passos 3. 6 a 3,8 para comandos de aceleração 1500 ms e 1700 ms.
- Transfira dados armazenados no sistema DAQ para um computador de processamento de dados e armazenamento a longo prazo.
3. Teste dinâmico de impulso
Realize uma série de testes de túnel de vento para caracterizar e analisar as forças aerodinâmicas lineares do hexacóptero, principalmente levantar e arrastar, sobre uma variedade de velocidades e ângulos de incidência. Durante os experimentos do túnel de vento, o hexacóptero está em condições constantes de voo. Portanto, a magnitude do vetor de velocidade hexacóptero é a mesma que a velocidade do ar e assumida horizontalmente no quadro mundial. As forças de elevação e arrasto são principalmente devido ao fluxo de ar ao redor do hexacóptero. Note que as forças de elevação e arrasto são assumidas para caracterizar o elevador total e o arrasto total no hexacóptero; forças laterais são insignificantes.
O procedimento experimental realizado neste experimento é semelhante ao relatado em Foster10 e Russell11. Durante os testes do túnel de vento, o hexacóptero foi impulsionado por um conversor de energia conectado à energia de construção (AC) para garantir níveis consistentes de energia e tensão durante todos os testes. Observe que motores em RPMs altos podem consumir corrente apreciável; use medidor baixo e fio de comprimento curto para evitar queda de tensão considerável no fio durante a operação.
- Monte o hexacóptero no suporte de teste de célula de carga
- Conecte a célula de carga ao computador DAQ e conecte o hexacóptero ao GCS usando o procedimento descrito para o Teste de Impulso Estático.
- Fixar a posição de teste na base do túnel de vento com grampos C.
- Certifique-se de que o multicóptero esteja bem longe das paredes do túnel de vento, piso e teto para minimizar a perturbação e reflexão do fluxo livre de fluxo.
- Monte tubos pitot a vários metros do hexacóptero para provar fluxo de ar não perturbado. Conecte os sensores de pressão pitot ao sistema DAQ.
- Ajuste o ângulo de tom para o hexacóptero em 0° ajustando a articulação da dobradiça do suporte de teste. No túnel de vento, o ângulo de arremesso do hexacóptero e o ângulo de ataque são idênticos.
- Execute o programa de viés para estabelecer vieses de tensão de célula de carga.
- Inicialize o túnel de vento à velocidade do vento de 2,2 m/s.
- Uma vez que a velocidade de fluxo livre se instale ao valor desejado, colete leituras ft da linha de base da célula de carga com motores hexacopter desligados.
- Inicialize o comando do acelerador a 1300 ms, deixe a velocidade do ar no túnel de vento se estabelecer antes de coletar dados ft e pitot.
- Repita as etapas 3.7 - 3.9 para comandos de aceleração de 1500 ms e 1700 ms.
- Repetimos passos 3.5 - 3.10 para diferentes ângulos de campo hexacóptero e valores de velocidade de ar do túnel de vento, conforme indicado na Tabela 1.
Resultados
Testes de dinamômetro
Nas Figuras 5-6,as parcelas ilustram a variação de empuxo e torque, respectivamente, com o aumento do motor RPM. A partir dessas parcelas, o motor mínimo RPM necessário para que o multicopter paire pode ser determinado. Um gráfico mostrando dados de várias hélices pode ser obtido a partir de Sharma12. Além disso, as relações quadráticas entre impulso vs.RPM e momento vs.RPM podem ser claramente observadas, que estão descritas nas Equações (1) e (2). Usando esta relação quadrática, podemos então determinar os  coeficientes e para a hélice 6040, que são os seguintes:
coeficientes e para a hélice 6040, que são os seguintes:

A Figura 7 mostra que um aumento do RPM correspondente ao aumento do consumo de energia elétrica resulta na diminuição da eficiência motora. Experimentos semelhantes podem ser realizados para diferentes hélices para obter eficiência motora para o par motor-hélice. Os resultados de tais experimentos são úteis durante o projeto do veículo para determinar o par ideal de hélices motoras a serem usados no multicóptero. Essas decisões são baseadas nos parâmetros desejados da missão, como a duração e a velocidade do voo.
Como não há um feedback direto do sensor RPM no hexacóptero de baixo custo, estimamos o RPM encaixando uma superfície através do comando RPM, energia elétrica e acelerador (PWM). Este ajuste de superfície é usado para estimar o RPM em função da energia elétrica e do valor pwm. Com base nos dados coletados do dinamômetro, o ajuste superficial é mostrado na Figura 8,com a equação correspondente:



onde  está a configuração do motor PWM (acelerador) normalizada pelo valor médio de viés 1550 com um desvio padrão
está a configuração do motor PWM (acelerador) normalizada pelo valor médio de viés 1550 com um desvio padrão  de 201,9
de 201,9  , enquanto é normalizada pelo viés 71,11 W com um desvio padrão de 55,75 W.
, enquanto é normalizada pelo viés 71,11 W com um desvio padrão de 55,75 W.
Após a análise dos dados do dinamômetro, um segundo conjunto de dados foi coletado para validação e fornecido como uma entrada para  funcionar. Os resultados são então plotados em uma série temporal de variação RPM, como visto na Figura 9 e Figura 10. Esses gráficos confirmam que o fit estima RPM dentro de 95% dos limites do RPM real, como mostrado na Figura 9.
funcionar. Os resultados são então plotados em uma série temporal de variação RPM, como visto na Figura 9 e Figura 10. Esses gráficos confirmam que o fit estima RPM dentro de 95% dos limites do RPM real, como mostrado na Figura 9.
Resultados do Túnel de Vento
Experimentos no túnel de vento foram realizados seguindo a matriz de teste na Tabela 1. Para reduzir a complexidade, uma condição de ângulo de guinada zero (deslizamento lateral) foi mantida o tempo todo. Isso é consistente com a maioria dos perfis de voo em que câmeras e outros sensores são montados com uma orientação preferida para a frente. A variação de arrasto e elevação são plotadas contra diferentes ângulos de arremesso do hexacóptero e são mostradas nas Figuras 11 e 12, respectivamente. Ambas as parcelas mostram que o aumento do comando do acelerador resulta em um aumento significativo da força de elevação (impulso motor). Da mesma forma, um aumento na velocidade do túnel de vento resulta em um aumento significativo da força de arrasto agindo no hexacopter. Essas tendências são consistentes com Equação (7).
Um modelo de impulso estático requer apenas testes de dinamômetro. No entanto, para obter uma estimativa precisa de impulso dinâmico e arrasto, foram necessários experimentos de túnel de vento com sensor de células de carga FT. Com os dados coletados, podemos desenvolver uma tabela de pesquisa e coeficientes de arrasto, em função do ângulo de  campo e da velocidade livre do fluxo para permitir uma modelagem ft hexacópica precisa.
campo e da velocidade livre do fluxo para permitir uma modelagem ft hexacópica precisa.

Figura 1. Mundo de referência e coordenadas corporais. Clique aqui para ver uma versão maior desta figura.

Figura 2. Suporte de teste de célula de carga multicóptero. Clique aqui para ver uma versão maior desta figura.

Figura 3. Diagrama do sistema de aquisição de dados do túnel de vento (DAQ). Clique aqui para ver uma versão maior desta figura.

Figura 4. Configuração do dinamômetro. Clique aqui para ver uma versão maior desta figura.

Figura 5. Relação entre motor empuxo e RPM. Clique aqui para ver uma versão maior desta figura.

Figura 6. Relação entre torque do motor e RPM. Clique aqui para ver uma versão maior desta figura.
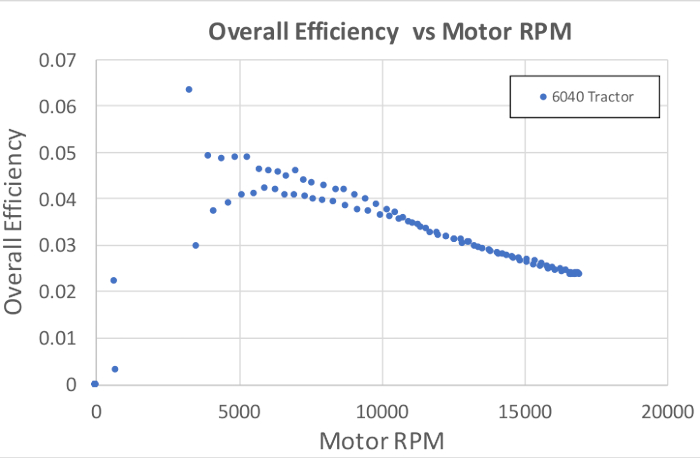
Figura 7. Eficiência geral do motor vs.RPM. Clique aqui para ver uma versão maior desta figura.

Figura 8. Encaixe superficial sobre acelerador (PWM), energia elétrica e RPM. Clique aqui para ver uma versão maior desta figura.
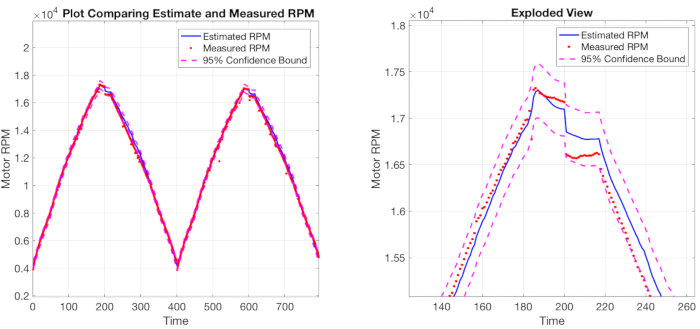
Figura 9. Validação de  com RPM medido diretamente do dinamômetro. Clique aqui para ver uma versão maior desta figura.
com RPM medido diretamente do dinamômetro. Clique aqui para ver uma versão maior desta figura.
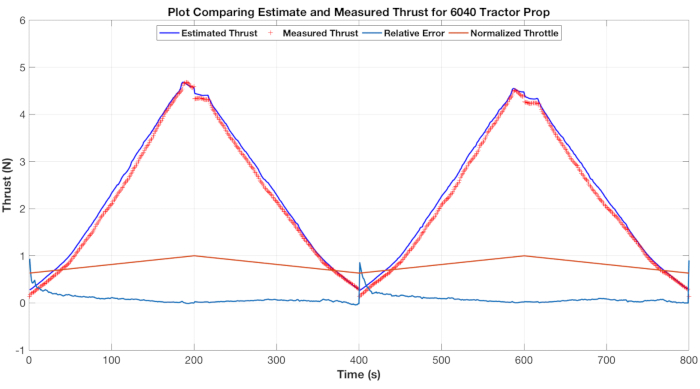
Figura 10. Validação dos dados de impulso estimados com dados de impulso medidos. Clique aqui para ver uma versão maior desta figura.

Figura 11. Carregar forças de elevação e arrasto de células para diferentes ângulos de campo e comandos de aceleração dada a velocidade constante do vento de 5 m/s. Por favor, clique aqui para ver uma versão maior desta figura.

Figura 12. Carregar forças de elevação e arrasto de células para diferentes ângulos de campo e comandos de aceleração dada a velocidade constante do vento de 8,47 m/s. Por favor, clique aqui para ver uma versão maior desta figura.
Mesa 1. Matriz de teste do túnel de vento
| Matriz de teste do túnel de vento | |||
| Velocidade do vento (m/s) | Ângulo de arremesso (°) | Ângulo de guinada (°) | Comando do acelerador (ms) |
| 2.2 | 30 a -30 | 0 | 0 e 1300 a 1700 |
| 4.5 | 30 a -30 | 0 | 0 e 1300 a 1700 |
| 6.7 | 30 a -30 | 0 | 0 e 1300 a 1700 |
| 8.9 | 30 a -30 | 0 | 0 e 1300 a 1700 |
Mesa 2. Lista de peças
| Lista de peças para hexacóptero | |||||
| Sr. No | Parte Nº | Descrição | Img | Link | Qty |
| 1 | SKU: 571000027-0 | Kit de hexacóptero Totem Q450 ™ HobbyKing |  |
https://hobbyking.com/en_us/hobbykingtm-totem-q450-hexacopter-kit.html | 1 |
| 2 | SKU: 571000064-0 | OpenPilot CC3D Revolution (Revo) 32bit F4 Based Flight Controller w/Integrated 433Mhz OPLink |  |
https://hobbyking.com/en_us/openpilot-cc3d-revolution-revo-32bit-flight-controller-w-integrated-433mhz-oplink.html | 1 |
| 3 | SKU: 571000065-0 | Openpilot OPLink Mini Estação Terrestre 433 MHz |  |
https://hobbyking.com/en_us/openpilot-oplink-mini-ground-station-433-mhz.html | 1 |
| 4 | SKU: 9536000003-0 | Pacote Multistar Elite 2204-2300KV 3-4s 4 (2/CCW 2/CW) |  |
https://hobbyking.com/en_us/multistar-elite-2204-2300kv-set-of-4-cw-ccw-2-ccw-2-cw.html | 2 |
| 5 | SKU: 9192000131-0 | Afro 20A Muti-Rotor ESC (SimonK Firmware) |  |
https://hobbyking.com/en_us/afro-esc-20amp-multi-rotor-motor-speed-controller-simonk-firmware.html | 8 |
| 6 | SKU: T2200.3S.30 | Turnigy 2200mAh 3S 30C Lipo Pack |  |
https://hobbyking.com/en_us/turnigy-2200mah-3s-30c-lipo-pack.html | 1 |
| 7 | SKU: 9171000144 | Hobby King Octocopter Power Distribution Board |  |
https://hobbyking.com/en_us/hobby-king-octocopter-power-distribution-board.html | 1 |
| 8 | SKU: 426000022-0 | King KongMultirotor Prop 6x4 CW/CCW |  |
https://hobbyking.com/en_us/kingkong-multirotor-propeller-6x4-cw-ccw-black-20pcs.html | 1 |
| 8 | SKU: 329000304-0 | Hélice Gemfan 5x3 Black (CW/CCW) (2pcs) |  |
https://hobbyking.com/en_us/gemfan-propeller-5x3-black-cw-ccw-2pcs.html | 10 |
| 9 | - | Sistema transmissor Spektrum DX6 MD2 com receptor AR610 |  |
https://www.amazon.com/Spektrum-Transmitter-System-AR610-Receiver/dp/B01B9DYOWG/ref=sr_1_2?ie=UTF8&qid=1494000219&sr=8-2&keywords=spektrum+dx6 | 1 |
| 10 | 709-RSP-1600-12 | Trocando fontes de alimentação 1500W 12V 125A |  |
https://www.mouser.com/ProductDetail/Mean-Well/RSP-1600-12/?qs=%2fha2pyFadujYDPrAgY3T1JlGoR5AZMKL7jhmRydJUc1Z44%252bNekUvbQ%3d%3d | 1 |
| Lista de peças para DAQ | |||||
| Sr. No | Parte Nº | Descrição | Img | Link | Qty |
| 1 | ATHM800-256ALP Rev F | Athena II PC /104 SBC |  |
http://www.diamondsystems.com/products/athenaii | 1 |
| 2 | SI-145-5 | Mini 45 Force /Torque Sensor |  |
http://www.ati-ia.com/products/ft/ft_models.aspx?id=Mini45 | 1 |
| 3 | - | Hobbypower Airspeed Sensor MPXV7002DP Pressão diferencial |  |
https://www.amazon.com/Hobbypower-Airspeed-MPXV7002DP-Differential-controller/dp/B00WSFWO36/ref=pd_day0_21_2?_encoding=UTF8&pd_rd_i=B00WSFWO36&pd_rd_r=8KRZ03PR2XAJ1HXD4BKS&pd_rd_w=M1tek&pd_rd_wg=LVHjU&psc=1&refRID=8KRZ03PR2XAJ1HXD4BKS | 1 |
| Lista de peças para dinamômetro | |||||
| Sr. No | Parte Nº | Descrição | Img | Link | Qty |
| 1 | Série-1580 | Dinamômetro de referência rc |  |
https://www.rcbenchmark.com/dynamometer-series-1580/ | 1 |
Aplicação e Resumo
Aqui descrevemos um protocolo para caracterizar as forças aerodinâmicas agindo em um hexacóptero. Este protocolo pode ser aplicado diretamente a outras configurações multirotor. A caracterização adequada das forças aerodinâmicas é necessária para melhorar o design de controle, entender os limites do envelope de voo e estimar os campos de vento locais como em Xiang13. O protocolo apresentado para determinar o RPM do motor com base no consumo de energia e comando do acelerador tem aplicações diretas para estimar rpm e impulso quando controladores eletrônicos de velocidade de baixo custo (ESCs) sem sensor de RPM são usados. Por fim, a aplicação de técnicas avançadas de controle, como no modelo de controle preditivo para rastreamento de trajetória, exige conhecimento da aerodinâmica do veículo e das forças de impulso, conforme descrito em Kamel14.
Referências
- Clothier, R.A., and Walker, R.A., “Safety Risk Management of Unmanned Aircraft Systems,” Handbook of Unmanned Aerial Vehicles, Springer, 2015, pp. 2229–2275.
- Ampatis, C., and Papadopoulos, E., “Parametric Design and Optimization of Multi-rotor Aerial Vehicles,” Applications of Mathematics and Informatics in Science and Engineering, Springer, 2014, pp. 1–25.
- Bershadsky, D., Haviland, S., and Johnson, E. N., “Electric Multirotor UAV Propulsion System Sizing for Performance Prediction and Design Optimization,” 57th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conf., 2016.
- Bangura, M., Melega, M., Naldi, R., and Mahony, R., “Aerodynamics of Rotor Blades for Quadrotors,” arXiv preprint arXiv:1601.00733, 2016
- Ducard, G., and Minh-Duc Hua. "Discussion and Practical Aspects on Control Allocation for a Multi-rotor Helicopter." Conf. on Unmanned Aerial Vehicle in Geomatics, 2011.
- Powers C., Mellinger D., Kumar V. “Quadrotor Kinematics and Dynamics” In: Handbook of Unmanned Aerial Vehicles. Springer, 2015
- McClamroch, N. Harris. “Steady Aircraft Flight and Performance.” Princeton University Press, 2011.
- Quan, Q., “Introduction to Multicopter Design and Control”, Springer Singapore, 2017.
- LibrePilot, https://www.librepilot.org/site/index.html
- Foster, J. and Hartman, D., “High-Fidelity Multi-Rotor Unmanned Aircraft System Simulation Development for Trajectory Prediction under Off-Nominal Flight Dynamics,” Proc. Air Transportation Integration & Operations (ATIO) Conference, AIAA, 2017.
- Russell, Carl R., et al. "Wind Tunnel and Hover Performance Test Results for Multicopter UAS Vehicles," 2016.
- Sharma, P. and Atkins, E., “An Experimental Investigation of Tractor and Pusher Hexacopter Performance,” Proc. AIAA Aviation Conference, AIAA, June 2018. (to appear)
- Xiang, X., et al. "Wind Field Estimation through Autonomous Quadcopter Avionics." 35th AIAA/IEEE Digital Avionics Systems Conference (DASC), IEEE, 2016.
- Kamel, M., et al. "Model Predictive Control for Trajectory Tracking of Unmanned Aerial Vehicles using Robot Operating System." Robot Operating System (ROS). Springer, Cham, 2017, 3-39.
Pular para...
Vídeos desta coleção:

Now Playing
Aerodinâmica de Multicópteros: Caracterizando o Empuxo em um Hexacóptero
Aeronautical Engineering
9.1K Visualizações

Desempenho Aerodinâmico de um Aeromodelo: O DC-6B
Aeronautical Engineering
8.3K Visualizações

Caracterização da hélice: variações no passo, diâmetro e número de pás no desempenho
Aeronautical Engineering
26.2K Visualizações

Comportamento do aerofólio: Distribuição de pressão sobre uma asa Clark Y-14
Aeronautical Engineering
21.0K Visualizações

Desempenho da asa Clark Y-14: Implantação de dispositivos de alta sustentação (Flaps e Slats)
Aeronautical Engineering
13.3K Visualizações

Método da esfera de turbulência: avaliando a qualidade do fluxo do túnel de vento
Aeronautical Engineering
8.7K Visualizações

Fluxo Cilíndrico Cruzado: Medição da Distribuição de Pressão e Estimando os Coeficientes de Arrasto
Aeronautical Engineering
16.1K Visualizações

Análise de bocais: variações no número de Mach e na pressão ao longo de um bocal convergente e convergente-divergente
Aeronautical Engineering
37.9K Visualizações

Imageamento de Schlieren: uma técnica para visualizar recursos de fluxo supersônico
Aeronautical Engineering
11.4K Visualizações

Visualização de fluxo em um túnel de água: observando o vórtice de ponta sobre uma asa delta
Aeronautical Engineering
8.0K Visualizações

Visualização de fluxo com corante de superfície: um método qualitativo para observar padrões de estrias em fluxo supersônico
Aeronautical Engineering
4.9K Visualizações

Tubo Pitot-estático: um dispositivo para medir a velocidade do fluxo de ar
Aeronautical Engineering
48.7K Visualizações

Anemometria de temperatura constante: uma ferramenta para estudar o fluxo em camada limite turbulenta
Aeronautical Engineering
7.2K Visualizações

Transdutor de Pressão: Calibração Usando um Tubo Pitot-estático
Aeronautical Engineering
8.5K Visualizações

Controle de Voo em Tempo Real: Calibração de Sensor Incorporado e Aquisição de Dados
Aeronautical Engineering
10.2K Visualizações
Copyright © 2025 MyJoVE Corporation. Todos os direitos reservados