Aerodinámica de multicópteros: Caracterización del empuje en un hexacóptero
Visión general
Fuente: Prashin Sharma y Ella M. Atkins, Departamento de Ingeniería Aeroespacial, Universidad de Michigan, Ann Arbor, MI
Multicopters se están volviendo populares para una variedad de aplicaciones comerciales y de hobby. Están comúnmente disponibles como configuraciones quadcopter (cuatro propulsores), hexacóptero (seis propulsores) y octocóptero (ocho propulsores). Aquí, describimos un proceso experimental para caracterizar el rendimiento multicóptero. Se prueba una pequeña plataforma hexacóptero modular que proporciona redundancia de la unidad de propulsión. El empuje del motor estático individual se determina mediante un dinamómetro y diferentes comandos de hélice y entrada. Este empuje estático se representa entonces como una función de las RPM del motor, donde las RPM se determinan a partir de la potencia del motor y la entrada de control. El hexacóptero se monta en un soporte de prueba de células de carga en un túnel de viento recirculante de baja velocidad de 5' x 7', y sus componentes aerodinámicos de elevación y fuerza de arrastre se caracterizaron durante el vuelo a diferentes señales de motor, velocidad de flujo de flujo libre y ángulo de ataque.
Un hexacóptero fue seleccionado para este estudio debido a su resistencia a la falla del motor (unidad de propulsión), como se informó en Clothier1. Junto con la redundancia en el sistema de propulsión, también se requiere la selección de componentes de alta fiabilidad para un vuelo seguro, especialmente para las misiones que están sobrepobladas. En Ampatis2,los autores discuten la selección óptima de piezas multicópteras, como motores, cuchillas, baterías y controladores electrónicos de velocidad. Investigaciones similares también se han divulgado en Bershadsky3, que se centra en la selección adecuada de un sistema de hélices para satisfacer los requisitos de la misión. Junto con la redundancia y la fiabilidad de los componentes, comprender el rendimiento del vehículo también es esencial para garantizar que se respeten los límites de la envolvente de vuelo y para seleccionar el diseño más eficiente.
Principios
Un multicóptero es un vehículo aéreo que tiene varios rotores en comparación con los helicópteros tradicionales, que tienen un solo rotor principal. Un rotor de helicóptero tradicional tiene paso variable, lo que permite al piloto controlar la elevación y la dirección. Por el contrario, los multicóptero dependen de rotores de paso fijo y utilizan variaciones en la velocidad del motor para el control del vehículo.
Ha surgido una variedad de diferentes configuraciones multicóptero, como quadcopters con cuatro rotores, hexacópteros con seis rotores y octocópteros con ocho rotores. Por lo general, los multicóptero tienen el mismo número de hélices de paso fijo en el sentido de las agujas del reloj (CW) y en sentido contrario a las agujas del reloj (CCW), y las variaciones en la velocidad de los rotores dan como resultado las siguientes rotaciones en 3D durante el vuelo:
- Yaw – rotación sobre el eje vertical, lo que resulta en un cambio de ángulo de dirección
- Rodar – rotación sobre el eje que apunta hacia la parte delantera del vehículo, lo que resulta en movimiento de lado a lado
- Tono – rotación sobre el eje que corre de izquierda a derecha, lo que resulta en un movimiento de inclinación hacia adelante y hacia atrás
Los multicóptero, incluidos los hexacópteros, se pueden controlar para mantener un vuelo estable con respecto a los siguientes grados de libertad:
- Hover – Todas las hélices funcionan aproximadamente a la misma velocidad y, por lo tanto, producen aproximadamente el mismo empuje. Dado que todas las hélices están igualmente espaciadas desde el centro de gravedad, el empuje de las hélices no produce un par de rotación neto en el avión. Además, el hexacóptero utiliza tres hélices giratorias en el sentido de las agujas del reloj (CW) y tres hélices giratorias en sentido contrario a las agujas del reloj (CCW) para que el par de la hélice se cancele cuando están operando a velocidades iguales. En el desplazamiento, el empuje total hacia arriba equilibra la fuerza gravitacional hacia abajo, y el multicóptero mantiene cero ángulos de paso y balanceo en condiciones de viento cero (arrastrar).
- Control de rodillos –Un hexacóptero se puede controlar sobre su eje de rodillo aumentando la velocidad de las hélices en un lado y disminuyendo la velocidad de las hélices en el otro lado. Cuando el aumento de empuje en un lado es el mismo que la disminución de empuje en el lado opuesto, el empuje de la red sigue siendo el mismo. Del mismo modo, el efecto neto del par sigue siendo el mismo.
- Control de tono: para un hexacóptero, el control de tono es análogo al control de balanceo. El diferencial de empuje entre las hélices delantera y trasera hace que el hexacóptero se lance; si el empuje se incrementa en las hélices traseras y disminuye en las hélices delanteras, el hexacóptero avanza.
- Control de guias – El control de guijo se logra equilibrando los pares rotacionales de la hélice en el sentido de las agujas del reloj con los pares de rotación de la hélice en sentido contrario a las agujas del reloj. Al girar las hélices en sentido contrario a las agujas del reloj más rápido que las hélices en el sentido de las agujas del reloj (o viceversa), la reacción de red opuesta en el hexacóptero induce una rotación en la guija.
A continuación se describe otro resumen de la física hexacóptero.
Parámetros del motor
Se utiliza un modelo de parámetro abultado según Bangura4 para especificar el empuje y el par de cada unidad de propulsor de motor/hélice:
 (1)
(1)
 (2)
(2)
donde  se genera el
se genera el  empuje, es
empuje, es  el par
el par  motor, es
motor, es  el coeficiente de empuje, es el coeficiente de momento y es la velocidad de rotación del motor en RPM (revoluciones por minuto). La potencia y la eficiencia del motor se pueden calcular a partir de las siguientes ecuaciones:
el coeficiente de empuje, es el coeficiente de momento y es la velocidad de rotación del motor en RPM (revoluciones por minuto). La potencia y la eficiencia del motor se pueden calcular a partir de las siguientes ecuaciones:
 (3)
(3)
 (4)
(4)
 (5)
(5)
donde  se genera la
se genera la  potencia mecánica, es
potencia mecánica, es  la
la  entrada
entrada  de energía eléctrica en tensión y corriente, y es la eficiencia del motor.
de energía eléctrica en tensión y corriente, y es la eficiencia del motor.  se determinan experimentalmente utilizando los datos obtenidos de los experimentos de dinamómetro.
se determinan experimentalmente utilizando los datos obtenidos de los experimentos de dinamómetro.
Dinámica hexacóptero
La dinámica de un hexacóptero, como se describe en Ducard5 y Powers6, se basa en los marcos de referencia ilustrados en la Figura 1,donde el eje ortonormal representado por  representa un marco de coordenadas universales con origen en
representa un marco de coordenadas universales con origen en  . El marco de coordenadas universales es un marco fijo con todos los demás marcos definidos con respecto a él, por lo que es conveniente expresar la traducción y la cinemática rotacional de un hexacóptero. El marco de coordenadas del cuerpo, dado por
. El marco de coordenadas universales es un marco fijo con todos los demás marcos definidos con respecto a él, por lo que es conveniente expresar la traducción y la cinemática rotacional de un hexacóptero. El marco de coordenadas del cuerpo, dado por  el origen
el origen  , se encuentra en el centro de gravedad (CG) para el hexacóptero y se define con respecto al marco del mundo; los ejes del marco del cuerpo se fijan al hexacóptero. El marco de coordenadas del cuerpo se utiliza para definir la dirección de empuje generada por el hexacóptero. Por lo general, para los vehículos aéreos, también se define un cuadro de viento con su origen en el CG del vehículo. El cuadro de viento se utiliza para expresar las fuerzas aerodinámicas y los momentos que actúan sobre el hexacóptero. Sin embargo, para los fines de este experimento, consideramos el marco mundial y el marco de viento como idénticos porque el flujo en el túnel de viento es siempre horizontal; Para más información sobre los marcos de referencia de aeronaves, véase McClamroch7.
, se encuentra en el centro de gravedad (CG) para el hexacóptero y se define con respecto al marco del mundo; los ejes del marco del cuerpo se fijan al hexacóptero. El marco de coordenadas del cuerpo se utiliza para definir la dirección de empuje generada por el hexacóptero. Por lo general, para los vehículos aéreos, también se define un cuadro de viento con su origen en el CG del vehículo. El cuadro de viento se utiliza para expresar las fuerzas aerodinámicas y los momentos que actúan sobre el hexacóptero. Sin embargo, para los fines de este experimento, consideramos el marco mundial y el marco de viento como idénticos porque el flujo en el túnel de viento es siempre horizontal; Para más información sobre los marcos de referencia de aeronaves, véase McClamroch7.
En primer lugar, aquí hay una introducción a la notación. L es la longitud del brazo desde cada motor hexacóptero hasta el centroide del vehículo en el plano horizontal del cuerpo, y la magnitud total de empuje del motor es dada y actúa en la dirección zdel bastidor del cuerpo. La magnitud del  par se da mediante un subíndice que representa el eje de referencia del marco del cuerpo.
par se da mediante un subíndice que representa el eje de referencia del marco del cuerpo.  ,
, 
 y representar los coeficientes de arrastre hexacóptero a
y representar los coeficientes de arrastre hexacóptero a  lo largo de cada viento respectivo
lo largo de cada viento respectivo  o equivalentemente eje del marco del mundo, es la masa del hexacóptero, y es la aceleración gravitacional. La fuerza de empuje total y los pares de rotación en términos de valores de RPM del motor se indican mediante:
o equivalentemente eje del marco del mundo, es la masa del hexacóptero, y es la aceleración gravitacional. La fuerza de empuje total y los pares de rotación en términos de valores de RPM del motor se indican mediante:
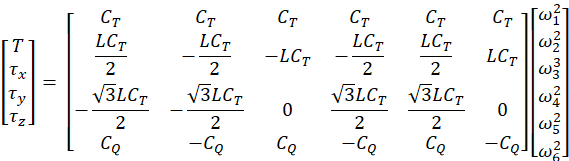 (6)
(6)
Las ecuaciones de Newton de movimiento lineal en el marco del mundo se pueden definir como:
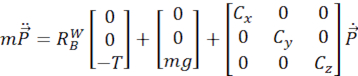 (7)
(7)
La  matriz de rotación se define mediante la rotación del ángulo de Euler Z-X-Y:
matriz de rotación se define mediante la rotación del ángulo de Euler Z-X-Y:
 (8)
(8)
donde el ángulo de guiñada ( ) es la
guiñada ( ) es la rotación sobre el eje Z, el
rotación sobre el eje Z, el ángulo de balanceo ( ) es
ángulo de balanceo ( ) es  la rotación sobre el eje X, el ángulo de paso ( ) es la rotación sobre el eje Y, y la notación abreviada , es para cada ángulo.
la rotación sobre el eje X, el ángulo de paso ( ) es la rotación sobre el eje Y, y la notación abreviada , es para cada ángulo.
En estos experimentos, sólo nos preocupan las fuerzas aerodinámicas que actúan sobre el hexacóptero en movimiento lineal, pero para la integridad en la comprensión de la dinámica del hexacóptero, las ecuaciones de actitud de movimiento se definen a continuación. En primer lugar, p se define como velocidad angular sobre el eje Xdel cuerpo, q es la velocidad angular sobre el eje Ydel cuerpo, y r es la velocidad angular sobre el eje Zdel cuerpo.
 (9)
(9)
 es la fuerza ascendente aplicada por el propulsor i, y yo es el momento hexacóptero de la matriz de inercia que se puede determinar utilizando un péndulo bifilar. Puede obtener más información para este procedimiento de Quan8. Las velocidades angulares del cuerpo y del marco del mundo están relacionadas por:
es la fuerza ascendente aplicada por el propulsor i, y yo es el momento hexacóptero de la matriz de inercia que se puede determinar utilizando un péndulo bifilar. Puede obtener más información para este procedimiento de Quan8. Las velocidades angulares del cuerpo y del marco del mundo están relacionadas por:
 (10)
(10)
Procedimiento
Este protocolo caracteriza el empuje hexacopter y la aerodinámica. Para este experimento, utilizamos componentes listos para usar disponibles comercialmente para el hexacóptero, y los detalles se proporcionan en la Tabla 2. Para el controlador de vuelo, seleccionamos un piloto automático de código abierto, Librepilot,9 ya que proporcionaba flexibilidad para controlar los comandos individuales del motor emitidos al hexacóptero.
El soporte de prueba para el montaje de la célula de carga y el hexacóptero se fabricó internamente utilizando madera contrachapada laminada y se muestra en la Figura 2. Al diseñar el soporte de prueba, tenga en cuenta que debe permitir un ajuste preciso del ángulo de ataque del multicóptero y ser lo suficientemente rígido para soportar las fuerzas de flexión y las vibraciones creadas durante el funcionamiento de los motores.
Una célula de carga de 6 ejes se monta en el soporte de prueba y se conecta a la placa de adquisición de datos, como se muestra en la figura 3. Las fuerzas aerodinámicas y de empuje son detectadas en el marco del cuerpo del hexacóptero por la célula de carga. Los datos del medidor de tensión pasan a través de un acondicionador de señal. A continuación, la placa de adquisición de datos (DAQ) adquiere los componentes analógicos de fuerza y par mediante un procedimiento de calibración proporcionado por el fabricante de la célula de carga. A continuación, la placa DAQ almacena estos valores en un búfer de alta velocidad y posteriormente en un disco permanente.
Para este protocolo, primero, determinar las fuerzas generadas por los motores individuales. A continuación, determinar las fuerzas que actúan sobre el fuselaje desnudo, seguido por la determinación de las fuerzas generadas por todo el hexacóptero como una función de los comandos de RPM del motor. Publique los mismos comandos RPM a todos los motores para cada prueba.
1. Experimento del Dinamómetro
El dinamómetro permite la medición directa de parámetros, incluyendo empuje, par, RPM, voltaje de la batería y corriente. Parámetros como la energía eléctrica, la potencia mecánica y la eficiencia del motor pueden derivarse de las ecuaciones (3), (4) y (5).
- Conecte el dinamómetro al ordenador DAQ mediante un conector USB.
- Ejecute la interfaz gráfica de usuario (GUI) proporcionada con el dinamómetro.
- Calibre el dinamómetro siguiendo las instrucciones que aparecen en pantalla proporcionadas. Use pesas y un brazo de palanca conocido cuando se le solicite.
- Monte el motor en el soporte de prueba del dinamómetro.
- Coloque la hélice en una configuración de extracción (tractor), como se muestra en la Figura 4.
- Conecte la batería al dinamómetro.
- Fije firmemente el dinamómetro a la mesa de trabajo con abrazaderas C.
- Ejecute el programa de entrada de pasos y registre los parámetros medidos, incluidos el empuje, el par, las RPM del motor, la corriente del motor y el comando de modulación de ancho de pulso (PWM).
2. Prueba de empuje estático
- Fije el hexacóptero en el soporte de prueba de la célula de carga utilizando tornillos de montaje.
- Abra el Sistema de adquisición de datos (DAQ) y ejecute el programa de sesgo del medidor de tensión de células de carga.
- Conecte el controlador de vuelo hexacopter al ordenador mediante un cable micro USB y abra el software Ground Controller Station (GCS).
- Conecte la fuente de alimentación al hexacóptero.
- Seleccione la pestaña Configuración -> Salida en GCS. Enlace todos los motores y compruebe las pruebas en vivo de las salidas.
- Establezca el comando throttle deseado en 1300 ms. Asegúrese de que puede operar todos los motores con el mismo comando de acelerador (PWM).
- Deje que el sistema se estabilice durante varios segundos y, a continuación, ejecute el programa DAQ para recopilar datos de la célula de carga.
- Una vez completada la recopilación de datos, detenga los motores.
- Repita los pasos 3. 6 a 3.8 para los comandos de aceleración 1500 ms y 1700 ms.
- Transfiera los datos almacenados en el sistema DAQ a un ordenador de procesamiento de datos y almacenamiento a largo plazo.
3. Prueba de empuje dinámico
Realizar una serie de pruebas de túnel de viento para caracterizar y analizar las fuerzas aerodinámicas lineales del hexacóptero, principalmente levantar y arrastrar, sobre una variedad de velocidades de aire y ángulos de incidencia. Durante los experimentos del túnel de viento, se supone que el hexacóptero está en condiciones de vuelo constante. Por lo tanto, la magnitud del vector de velocidad hexacopter es la misma que la velocidad del aire y se asume horizontal en el marco del mundo. Las fuerzas de elevación y arrastre se deben principalmente al flujo de aire alrededor del hexacóptero. Tenga en cuenta que se supone que las fuerzas de elevación y arrastre caracterizan el total de elevación y arrastre total en el hexacóptero; las fuerzas laterales son insignificantes.
El procedimiento experimental realizado en este experimento es similar a los reportados en Foster10 y Russell11. Durante las pruebas del túnel de viento, el hexacóptero fue impulsado por un convertidor de potencia conectado a la potencia del edificio (AC) para asegurar niveles de potencia y voltaje consistentes a lo largo de todas las pruebas. Tenga en cuenta que los motores con RPM altos pueden consumir corriente apreciable; utilizar alambre de calibre bajo y longitud corta para evitar caídas de tensión apreciables a través del cable durante el funcionamiento.
- Monte el hexacóptero en el soporte de prueba de la célula de carga
- Conecte la celda de carga al equipo DAQ y conecte el hexacóptero al GCS mediante el procedimiento descrito para la prueba de empuje estático.
- Fije el soporte de prueba a la base del túnel de viento con abrazaderas C.
- Asegúrese de que el multicóptero esté bien libre de paredes, suelo y techo del túnel de viento para minimizar la perturbación y la reflexión del flujo de flujo libre.
- Monte tubos pitot a varios metros del hexacóptero para tomar muestras de flujo de aire sin interrupciones. Conecte los sensores de presión pitot al sistema DAQ.
- Ajuste el ángulo de inclinación del hexacóptero a 0o ajustando la junta de bisagra del soporte de prueba. En el túnel de viento, el ángulo de inclinación del hexacóptero y el ángulo de ataque son idénticos.
- Ejecute el programa de sesgo para establecer sesgos de voltaje de celda de carga.
- Inicializar el túnel de viento a la velocidad del viento de 2,2 m/s.
- Una vez que la velocidad de flujo de flujo libre se asienta en el valor deseado, recoja las lecturas FT de línea base de la célula de carga con los motores hexacopter apagados.
- Inicializar el comando throttle a 1300 ms, deje que la velocidad del aire en el túnel de viento se asiente antes de recoger los datos FT y pitot.
- Repita los pasos 3.7 - 3.9 para los comandos del acelerador de 1500 ms y 1700 ms.
- Repita los pasos 3.5 - 3.10 para diferentes ángulos de paso hexacopter y valores de velocidad de aire del túnel de viento, como se indica en la Tabla 1.
Resultados
Pruebas de Dinamómetro
En las figuras 5-6, las gráficas ilustran la variación de empuje y par, respectivamente, con el aumento de las RPM del motor. A partir de estas gráficas, se pueden determinar las RPM mínimas del motor necesarias para que el multicóptero se mantenga flotando. Una gráfica que muestra datos de múltiples hélices se puede obtener de Sharma12. Además, se pueden observar claramente las relaciones cuadráticas entre el empuje frente a las RPM y el momento frente a las RPM, que se describen en las ecuaciones (1) y (2). Usando esta relación cuadrática, entonces podemos determinar los coeficientes y los  coeficientes para la hélice 6040, que son los siguientes:
coeficientes para la hélice 6040, que son los siguientes:

La Figura 7 muestra que un aumento de las RPM correspondiente a un aumento en el consumo de energía eléctrica resulta en una disminución de la eficiencia del motor. Experimentos similares se pueden llevar a cabo para diferentes hélices para obtener la eficiencia del motor para el par motor-hélice. Los resultados de estos experimentos son útiles durante el diseño del vehículo para determinar el par óptimo motor-hélice que se utilizará en el multicóptero. Estas decisiones se basan en los parámetros de misión deseados, como la duración y la velocidad del vuelo.
Puesto que no hay retroalimentación directa del sensor de RPM en el hexacóptero de bajo costo, estimamos las RPM ajustando una superficie a través del comando RPM, energía eléctrica y acelerador (PWM). Este ajuste superficial se utiliza para estimar las RPM en función de la potencia eléctrica y el valor PWM. Según los datos recopilados del dinamómetro, el ajuste de la superficie se muestra en la Figura 8,con la ecuación correspondiente:



donde  está el ajuste del motor PWM (acelerador) normalizado
está el ajuste del motor PWM (acelerador) normalizado  por el valor de sesgo medio
por el valor de sesgo medio  1550 con una desviación estándar de 201.9, mientras que se normaliza por sesgo 71.11 W con una desviación estándar de 55.75 W.
1550 con una desviación estándar de 201.9, mientras que se normaliza por sesgo 71.11 W con una desviación estándar de 55.75 W.
Después de analizar los datos del dinamómetro, se recopiló un segundo conjunto de datos para su validación y se proporcionó como entrada para  la función. A continuación, los resultados se trazan en una serie temporal de variación de RPM, como se ve en la Figura 9 y la Figura 10. Estas gráficas confirman que el ajuste estima RPM dentro de los límites del 95% de las RPM reales, como se muestra en la Figura 9.
la función. A continuación, los resultados se trazan en una serie temporal de variación de RPM, como se ve en la Figura 9 y la Figura 10. Estas gráficas confirman que el ajuste estima RPM dentro de los límites del 95% de las RPM reales, como se muestra en la Figura 9.
Resultados del túnel de viento
Los experimentos en el túnel de viento se llevaron a cabo siguiendo la matriz de prueba en la Tabla 1. Para reducir la complejidad, se mantuvo en todo momento una condición de ángulo de guias cero (deslizamiento lateral). Esto es coherente con la mayoría de los perfiles de vuelo en los que las cámaras y otros sensores se montan con una orientación orientada hacia delante preferida. La variación de arrastre y elevación se traza contra diferentes ángulos de inclinación del hexacóptero y se muestra en las figuras 11 y 12,respectivamente. Ambas gráficas muestran que el aumento del comando del acelerador da como resultado un aumento significativo de la fuerza de elevación (empuje del motor). Del mismo modo, un aumento en la velocidad del túnel de viento resulta en un aumento significativo en la fuerza de arrastre que actúa sobre el hexacóptero. Estas tendencias son consistentes con la Ecuación (7).
Un modelo de empuje estático solo requiere pruebas de dinamómetro. Sin embargo, para obtener una estimación precisa del empuje dinámico y la resistencia, se requirieron experimentos de túnel de viento con detección de células de carga FT. Con los datos recogidos, podemos desarrollar una tabla de búsqueda de y arrastrar coeficientes, en función del ángulo de paso y la velocidad de aire de flujo libre para permitir un modelado FT hexacóptero preciso.
de búsqueda de y arrastrar coeficientes, en función del ángulo de paso y la velocidad de aire de flujo libre para permitir un modelado FT hexacóptero preciso.

Figura 1. Marcos de coordenadas de cuerpo y mundo de referencia. Haga clic aquí para ver una versión más grande de esta figura.

Figura 2. Soporte de prueba de células de carga multicóptero. Haga clic aquí para ver una versión más grande de esta figura.

Figura 3. Diagrama del sistema de adquisición de datos de túnel de viento (DAQ). Haga clic aquí para ver una versión más grande de esta figura.

Figura 4. Configuración del dinamómetro. Haga clic aquí para ver una versión más grande de esta figura.

Figura 5. Relación entre el empuje del motor y las RPM. Haga clic aquí para ver una versión más grande de esta figura.

Figura 6. Relación entre el par motor y las RPM. Haga clic aquí para ver una versión más grande de esta figura.
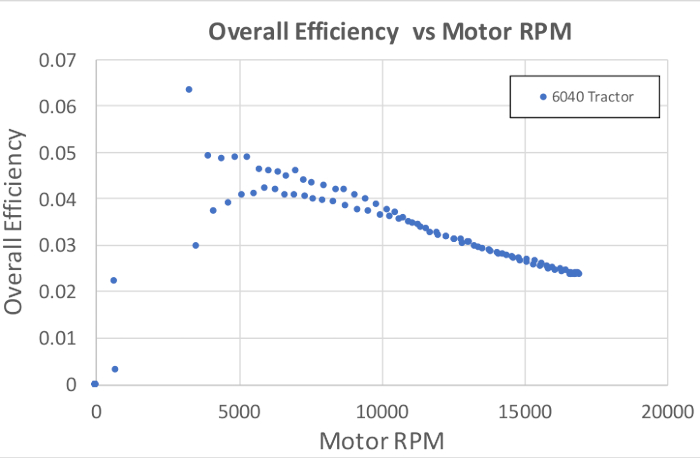
Figura 7. Eficiencia general del motor frente a RPM. Haga clic aquí para ver una versión más grande de esta figura.

Figura 8. Ajuste de superficie sobre el acelerador (PWM), energía eléctrica y RPM. Haga clic aquí para ver una versión más grande de esta figura.
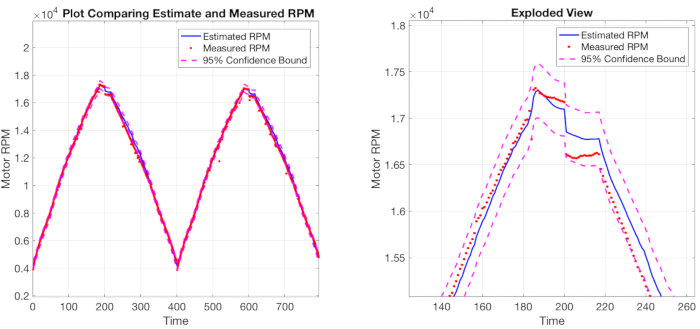
Figura 9. Validación  de RPM medidas directamente desde el dinamómetro. Haga clic aquí para ver una versión más grande de esta figura.
de RPM medidas directamente desde el dinamómetro. Haga clic aquí para ver una versión más grande de esta figura.
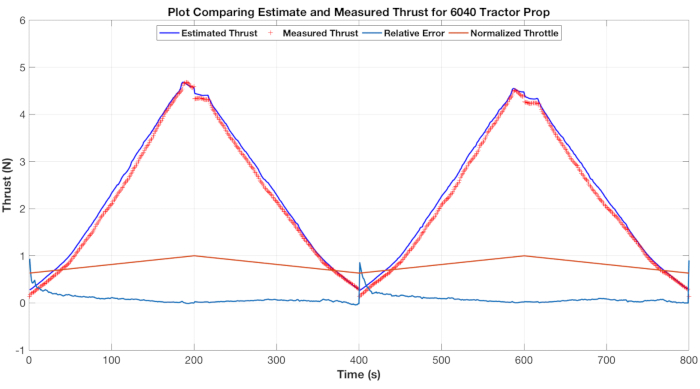
Figura 10. Validación de datos de empuje estimados con datos de empuje medidos. Haga clic aquí para ver una versión más grande de esta figura.

Figura 11. Cargar fuerzas de elevación y arrastre de celdas para diferentes ángulos de paso y comandos del acelerador dado una velocidad de viento constante de 5 m / s. Por favor, haga clic aquí para ver una versión más grande de esta figura.

Figura 12. Cargar fuerzas de elevación y arrastre de celdas para diferentes ángulos de paso y comandos del acelerador dado una velocidad de viento constante de 8,47 m/ s. Por favor, haga clic aquí para ver una versión más grande de esta figura.
Tabla 1. Matriz de prueba de túnel de viento
| Matriz de prueba del túnel de viento | |||
| Velocidad del viento (m/s) | Angulo de tono (o) | Angulo de guiviado (o) | Comando del acelerador (ms) |
| 2.2 | De 30 a -30 | 0 | 0 y 1300 a 1700 |
| 4.5 | De 30 a -30 | 0 | 0 y 1300 a 1700 |
| 6.7 | De 30 a -30 | 0 | 0 y 1300 a 1700 |
| 8.9 | De 30 a -30 | 0 | 0 y 1300 a 1700 |
Cuadro 2. Lista de piezas
| Lista de piezas para Hexacopter | |||||
| Sr No | No parte | Descripción | Img | Enlace | Qty |
| 1 | SKU: 571000027-0 | Kit hexagonal HobbyKing™ Totem Q450 |  |
https://hobbyking.com/en_us/hobbykingtm-totem-q450-hexacopter-kit.html | 1 |
| 2 | SKU: 571000064-0 | Controlador de vuelo basado en OpenPilot CC3D Revolution (Revo) 32bit F4 con OPLink integrado de 433Mhz |  |
https://hobbyking.com/en_us/openpilot-cc3d-revolution-revo-32bit-flight-controller-w-integrated-433mhz-oplink.html | 1 |
| 3 | SKU: 571000065-0 | Openpilot OPLink Mini Estación Terrestre 433 MHz |  |
https://hobbyking.com/en_us/openpilot-oplink-mini-ground-station-433-mhz.html | 1 |
| 4 | SKU: 9536000003-0 | Paquete Multistar Elite 2204-2300KV 3-4s 4 (2/CCW 2/CW) |  |
https://hobbyking.com/en_us/multistar-elite-2204-2300kv-set-of-4-cw-ccw-2-ccw-2-cw.html | 2 |
| 5 | SKU: 9192000131-0 | Afro 20A Muti-Rotor ESC (SimonK Firmware) |  |
https://hobbyking.com/en_us/afro-esc-20amp-multi-rotor-motor-speed-controller-simonk-firmware.html | 8 |
| 6 | SKU: T2200.3S.30 | Turnigy 2200mAh 3S 30C Lipo Pack |  |
https://hobbyking.com/en_us/turnigy-2200mah-3s-30c-lipo-pack.html | 1 |
| 7 | SKU: 9171000144 | Hobby King Octocopter Power Distribution Board |  |
https://hobbyking.com/en_us/hobby-king-octocopter-power-distribution-board.html | 1 |
| 8 | SKU: 426000022-0 | King KongMultirotor Prop 6x4 CW/CCW |  |
https://hobbyking.com/en_us/kingkong-multirotor-propeller-6x4-cw-ccw-black-20pcs.html | 1 |
| 8 | SKU: 329000304-0 | Gemfan Propeller 5x3 Negro (CW/CCW) (2pcs) |  |
https://hobbyking.com/en_us/gemfan-propeller-5x3-black-cw-ccw-2pcs.html | 10 |
| 9 | - | Sistema de transmisor Spektrum DX6 MD2 con receptor AR610 |  |
https://www.amazon.com/Spektrum-Transmitter-System-AR610-Receiver/dp/B01B9DYOWG/ref=sr_1_2?ie=UTF8&qid=1494000219&sr=8-2&keywords=spektrum+dx6 | 1 |
| 10 | 709-RSP-1600-12 | Fuentes de alimentación de conmutación 1500W 12V 125A |  |
https://www.mouser.com/ProductDetail/Mean-Well/RSP-1600-12/?qs=%2fha2pyFadujYDPrAgY3T1JlGoR5AZMKL7jhmRydJUc1Z44%252bNekUvbQ%3d%3d | 1 |
| Lista de piezas para DAQ | |||||
| Sr No | No parte | Descripción | Img | Enlace | Qty |
| 1 | ATHM800-256ALP Rev F | Athena II PC /104 SBC |  |
http://www.diamondsystems.com/products/athenaii | 1 |
| 2 | SI-145-5 | Mini 45 Sensor de fuerza /torque |  |
http://www.ati-ia.com/products/ft/ft_models.aspx?id=Mini45 | 1 |
| 3 | - | Hobbypower Sensor de velocidad de aire MPXV7002DP Presión diferencial |  |
https://www.amazon.com/Hobbypower-Airspeed-MPXV7002DP-Differential-controller/dp/B00WSFWO36/ref=pd_day0_21_2?_encoding=UTF8&pd_rd_i=B00WSFWO36&pd_rd_r=8KRZ03PR2XAJ1HXD4BKS&pd_rd_w=M1tek&pd_rd_wg=LVHjU&psc 1&refRID-8KRZ03PR2XAJ1HXD4BKS | 1 |
| Lista de piezas para dinamómetro | |||||
| Sr No | No parte | Descripción | Img | Enlace | Qty |
| 1 | Serie-1580 | RC Benchmark Dynamometer |  |
https://www.rcbenchmark.com/dynamometer-series-1580/ | 1 |
Aplicación y resumen
Aquí describimos un protocolo para caracterizar las fuerzas aerodinámicas que actúan sobre un hexacóptero. Este protocolo se puede aplicar a otras configuraciones del multirotor directamente. Se necesita una caracterización adecuada de las fuerzas aerodinámicas para mejorar el diseño del control, comprender los límites de la envolvente de vuelo y estimar los campos de viento locales como en Xiang13. El protocolo presentado para determinar las RPM del motor en función del consumo de energía y el comando del acelerador tiene aplicaciones directas para estimar rpm y empuje cuando se utilizan controladores electrónicos de velocidad (ESC) de bajo costo sin sensor de RPM. Por último, la aplicación de técnicas de control avanzadas, como en el control predictivo del modelo para el seguimiento de la trayectoria, requieren el conocimiento de la aerodinámica del vehículo y las fuerzas de empuje, como se describe en Kamel14.
Referencias
- Clothier, R.A., and Walker, R.A., “Safety Risk Management of Unmanned Aircraft Systems,” Handbook of Unmanned Aerial Vehicles, Springer, 2015, pp. 2229–2275.
- Ampatis, C., and Papadopoulos, E., “Parametric Design and Optimization of Multi-rotor Aerial Vehicles,” Applications of Mathematics and Informatics in Science and Engineering, Springer, 2014, pp. 1–25.
- Bershadsky, D., Haviland, S., and Johnson, E. N., “Electric Multirotor UAV Propulsion System Sizing for Performance Prediction and Design Optimization,” 57th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conf., 2016.
- Bangura, M., Melega, M., Naldi, R., and Mahony, R., “Aerodynamics of Rotor Blades for Quadrotors,” arXiv preprint arXiv:1601.00733, 2016
- Ducard, G., and Minh-Duc Hua. "Discussion and Practical Aspects on Control Allocation for a Multi-rotor Helicopter." Conf. on Unmanned Aerial Vehicle in Geomatics, 2011.
- Powers C., Mellinger D., Kumar V. “Quadrotor Kinematics and Dynamics” In: Handbook of Unmanned Aerial Vehicles. Springer, 2015
- McClamroch, N. Harris. “Steady Aircraft Flight and Performance.” Princeton University Press, 2011.
- Quan, Q., “Introduction to Multicopter Design and Control”, Springer Singapore, 2017.
- LibrePilot, https://www.librepilot.org/site/index.html
- Foster, J. and Hartman, D., “High-Fidelity Multi-Rotor Unmanned Aircraft System Simulation Development for Trajectory Prediction under Off-Nominal Flight Dynamics,” Proc. Air Transportation Integration & Operations (ATIO) Conference, AIAA, 2017.
- Russell, Carl R., et al. "Wind Tunnel and Hover Performance Test Results for Multicopter UAS Vehicles," 2016.
- Sharma, P. and Atkins, E., “An Experimental Investigation of Tractor and Pusher Hexacopter Performance,” Proc. AIAA Aviation Conference, AIAA, June 2018. (to appear)
- Xiang, X., et al. "Wind Field Estimation through Autonomous Quadcopter Avionics." 35th AIAA/IEEE Digital Avionics Systems Conference (DASC), IEEE, 2016.
- Kamel, M., et al. "Model Predictive Control for Trajectory Tracking of Unmanned Aerial Vehicles using Robot Operating System." Robot Operating System (ROS). Springer, Cham, 2017, 3-39.
Saltar a...
Vídeos de esta colección:

Now Playing
Aerodinámica de multicópteros: Caracterización del empuje en un hexacóptero
Aeronautical Engineering
9.1K Vistas

Rendimiento aerodinámico en un modelo de avión: El DC-6B
Aeronautical Engineering
8.3K Vistas

Caracterización de la hélice: Variaciones en el paso, el diámetro y el número de palas en el rendimiento
Aeronautical Engineering
26.2K Vistas

Comportamiento de la superficie aerodinámica: Distribución de la presión en un ala Clark Y-14
Aeronautical Engineering
21.0K Vistas

Rendimiento del ala Clark Y-14: Despliegue de dispositivos de elevación alta (Flaps y Slats)
Aeronautical Engineering
13.3K Vistas

Método esfera de turbulencia: Evaluación de la calidad del flujo del túnel de viento
Aeronautical Engineering
8.7K Vistas

Flujo cilíndrico transversal: medición de la distribución de la presión y estimación de los coeficientes de arrastre
Aeronautical Engineering
16.1K Vistas

Análisis de boquillas: variaciones en el número de Mach y la presión a lo largo de una boquilla convergente y una convergente-divergente
Aeronautical Engineering
37.9K Vistas

Fotografías de Schlieren: Una técnica para visualizar las características del flujo supersónico
Aeronautical Engineering
11.4K Vistas

Visualización del flujo en un túnel de agua: Observación del vórtice en el borde de ataque sobre un ala Delta
Aeronautical Engineering
8.0K Vistas

Visualización del flujo de tinte superficial: Un método cualitativo para observar los patrones de las líneas del tramo en un flujo supersónico
Aeronautical Engineering
4.9K Vistas

Tubo Pitot-estático: Un dispositivo para medir la velocidad del flujo de aire
Aeronautical Engineering
48.7K Vistas

Anemometría de temperatura constante:Uuna herramienta para estudiar el flujo de capa de límite turbulenta
Aeronautical Engineering
7.2K Vistas

Transductor de presión: Calibración mediante un tubo de Pitot estático
Aeronautical Engineering
8.5K Vistas

Control de vuelo en tiempo real: calibración de sensores integrados y adquisición de datos
Aeronautical Engineering
10.2K Vistas
ACERCA DE JoVE
Copyright © 2025 MyJoVE Corporation. Todos los derechos reservados