יציבות של כלי שיט צפים
Overview
מקור: אלכסנדר ס. רטנר וקווין ראו לי המחלקה להנדסה מכנית וגרעינית, אוניברסיטת פנסילבניה, פארק האוניברסיטאות, הרשות הפלסטינית
מטרת הניסוי הזה היא להדגים את תופעת היציבות של כלי שיט צפים - היכולת ימינה-עצמית כאשר הם מגולגלים לצד על ידי כוח חיצוני כלשהו. תכנון זהיר של צורות גוף הספינה וחלוקת מסה פנימית מאפשר לכלי שיט להיות יציבים עם טיוטות נמוכות (עומק שקוע של גוף הספינה), שיפור יכולת התמרון של כלי השיט והפחתת הגרירה.
בניסוי זה, תחילה תשונה סירה לדוגמה כדי לאפשר התאמה של מרכז המסה שלה (המייצג עומסי מטען שונים) ומעקב אוטומטי אחר זווית הגליל שלה. הסירה תונח במיכל מים, ותוטה לזוויות שונות בגבהים שונים של מרכז המסה שלה. לאחר שחרורו, ההתהפכות (התהפכות) או התנועה המתנדנדת של הסירה יהיו במעקב באמצעות מצלמה דיגיטלית ותוכנת ניתוח וידאו. התוצאות עבור זווית הגליל היציבה המרבית ותדירות התנודה יושוו לערכים תיאורטיים. חישובי יציבות יבוצעו באמצעות תכונות גיאומטריות ומבניות של הסירה שנקבעו בסביבת תכנון בסיוע מחשב.
Principles
כוח הציפה, התומך בכלי שיט צפים, שווה למשקל הנוזל שנעקר על ידי החלק השקוע של כלי שיט כאלה. כוח הציפה פועל כלפי מעלה, לאורך הקו האנכי העובר דרך המרכז (מרכז הנפח) של נפח שקוע זה. נקודה זו נקראת מרכז הציפה. אם מרכז המסה של מבנה צף נמצא מתחת למרכז הציפה שלו, כל ציד מתגלגל (תנועתעקב) יעניק רגע כדי לתקן את המבנה, ויחזיר אותו לכיוון הישר (איור 1א). אם מרכז המסה נמצא מעל מרכז הציפה, המבנה עלול להיות לא יציב ולגרום לו להתהפך אם הוא מופרע (איור 1ב). עם זאת, אם גוף הספינה הצפה מתוכנן בקפידה, הוא יכול להיות יציב, גם אם מרכז המסה שלו נמצא מעל מרכז הציפה שלו. כאן, להטות את כלי השיט מעט גורם לצורת הנפח השקוע שלו להשתנות, הסטת מרכז הציפה שלו כלפי חוץ לכיוון ההטיה. התוצאה היא רגע ימין נטו כל עוד קו הפעולה של ציפה הוא מחוץ למרכז המסה של המבנה (איור 1c). באופן שווה, כלי יהיה יציב אם נקודת ההצטלבות של קו הפעולה של ציפה ואת קו האמצע של גוף הספינה (metacenter) הוא מעל מרכז המסה שלה. חלק מהכלים הם מטא-כיווניים- רק כיוונון עצמי עד לזווית קריטית כלשהי.
חשוב גם לשקול את ההתנהגות הדינמית של כלי צף. דחפים חזקים מגלים עלולים לגרום לסירה להסתובב מעבר לגבול המטא-גרורתי שלה, גם אם זווית ההטיה הראשונית קטנה (כלומר,  גדולה
גדולה  לקטן). התדירות והמשרעת של תנודה עשויים להשפיע גם על נוחות הנוסעים. ניתן לחזות את תנועת הסיבוב של כלי השיט באיזון רגעי על מרכז המסה שלו. כאן, אניzz הוא הרגע של אינרציה על מרכז המסה, θ הוא זווית הגליל, m הוא מסת כלי השיט, ו Lס"מ, mc הוא המרחק לאורך קו האמצע של הסירה ממרכז המסה שלה metacenter שלה.
לקטן). התדירות והמשרעת של תנודה עשויים להשפיע גם על נוחות הנוסעים. ניתן לחזות את תנועת הסיבוב של כלי השיט באיזון רגעי על מרכז המסה שלו. כאן, אניzz הוא הרגע של אינרציה על מרכז המסה, θ הוא זווית הגליל, m הוא מסת כלי השיט, ו Lס"מ, mc הוא המרחק לאורך קו האמצע של הסירה ממרכז המסה שלה metacenter שלה.
 (1)
(1)

איור 1: א. כלי יציב עם מרכז המסה מתחת למרכז הציפה, הבטחת רגע ימין. b. כלי לא יציב עם מרכז המסה מעל מרכז הציפה. ג. צורת גוף הגורמת למרכז הציפה לפעול מחוץ למרכז המסה (מטה-מרכז מעל מרכז המסה). זה מניב יציבות גם עם מרכז המסה מעל מרכז הציפה.
Procedure
1. מדידת זווית היציבות המרבית
- בחר סירה קטנה. מומלץ גוון פשוט יחסית לצמצם את מורכבות הניתוח בסעיפים 3 ו-4.
- חבר תורן אנכי קל משקל בצבע בהיר לסירה (מומלץ כחול). קוד MATLAB שסופק עוקב אחר מיקום התורן בסרטון על-ידי חיפוש פיקסלים כחולים בהירים בתמונה. אם נעשה שימוש בתורן צבע אחר, יהיה צורך להתאים את קוד ניתוח התמונה בהתאם.
- הדביקו עניבת כבלים לתורן כדי לשמש כתחנה למשקל. החלק משקל(למשל,אגוז צימוד) על התורן כך שהוא נשען על העצירה.
- מניחים את הסירה במיכל מים גדול יותר, ואפשרו לה להתיישב (איור 2א). מקם את ההתקנה כך שזרימת האוויר בחדר לא תפריע לסירה. התקן מצלמת וידאו הפונה לתורן לאורך הסירה. מומלץ תפאורה לבנה.
- לאסוף וידאו הפניה של הסירה במנוחה, ולנתח אותו באמצעות הפונקציה MATLAB שסופקה(TrackMast.m). התאם את כיוון המצלמה עד שהיא תקרא נכון 0-הטיה כאשר הסירה נמצאת במנוחה. ייתכן שיהיה עליך להתאים את הפרמטרים מיסוך כדי לבודד את התורן על שורה 17 של הקוד.
- לאסוף קטעי וידאו של בהדרגה מאוד מפנה את הסירה על ידי לחיצה לצדדים על החלק העליון של התורן עד שהוא נופל על שלה (מתהפך). שמור את התורן במסגרת הווידאו זמן רב ככל האפשר במהלך כל בדיקה. בצע הליך זה עבור גבהים שונים של המשקל. הקלט את גובה המשקל על התורן עבור כל מקרה.
- נתח סרטוני וידאו אלה באמצעות קובץ Script MATLAB שסופק. עבור כל מקרה, ניתן לקבוע את הזווית היציבה המרבית על-ידי בדיקת זווית הפלט ומערכי הזמן. השלם טבלה של זווית התהפכות לעומת גובה המשקל.
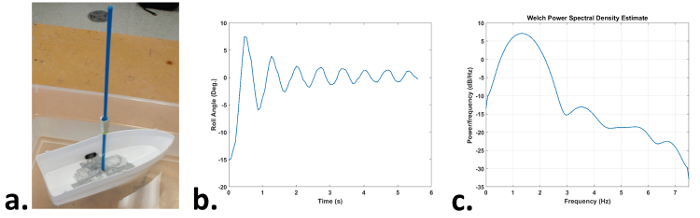
איור 2: א. סירת דגם עם משקל מתכוונן על התורן, b. וריאציית זווית גליל עם כאשר שוחרר מזווית קלה (שלב 2.1), ג. חלקת צפיפות ספקטרום הספקטרום של (ב) המציגה תדר תנודות שיא של 1.4 הרץ אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
2. מדידת תדירות התנודה
- בצע ערכה שנייה של ניסויי הטיה עם שני גבהים שונים במשקל התורן. הפעם, רק להטות את הסירה מעט (~ 10 °), ולאסוף קטעי וידאו של סירת נדנדה עבור 10 - 15 s.
- הפעל מחדש את פונקציית המעקב אחר התורן בסרטון הווידאו. לאחר קריאה לפונקציה, הערך את הביטוי הבא של MATLAB בפלט: pwelch( טטה,[],[], [],1/(t(2)-t(1)) ); . זה יתווה את צפיפות ספקטרום הכוח עבור סירת הנדנדה. התדירות המתגלגלת העיקרית היא ערך השיא בעלילה זו (איור 2b-c).
3. חיזוי זווית ההטיה
- באמצעות קנה מידה, למדוד את המסה של סירת הדגם, כולל התורן והמשקל.
- עבור כל מיקום של משקל התורן המוערך בשלב 1.5, איזון הסירה בצד שלה עם התורן על קצה ישר. תיעד את גובה נקודת האיזון מתחתית גוף הספינה כמרכז המסה (Hcm).
- באמצעות חבילת תוכנה CAD, ליצור מודל בקנה מידה של הסירה התורן עם משקל. ודא כי גוף מלא (מוצק) בדגם זה (איור 3א).
- מקם את המודל כך שקו המרכז של המעטפת התחתונה (השדרית) עולה בקנה אחד עם המקור בסביבת CAD והתורן הוא (בתחילה) מקביל לציר האנכי (y).
- בסביבת CAD, לסובב את הסירה על ציר z, אשר לאורך גוף הספינה, במרווחים קטנים (למשל, 5°, 10°, 15 °...).
- לאחר כל סיבוב, לחתוך את כל הסירה מעל רמה אנכית, כך שהנפח של החלק התחתון הנותר שווה את מסת הסירה הכוללת חלקי צפיפות המים (m / ρw, ρw = 1000 ק"ג מ'-3). זה מייצג את החלק של הסירה מתחת לקו המים כאשר הוא צף בזווית זו (איור 3b).
- באמצעות התכונה "מאפייני מסה" בתוכנת CAD, להעריך את מיקום x של centroid של המעטפת הנותרת. כאן, המקור צריך להיות לאורך הקצה הנמוך ביותר של boal (השדרית), ואת ציר x צריך להצביע בכיוון האופקי. זה מייצג את מרכז הציפה (xb); כוח הציפה פועל דרך נקודה זו. הכן טבלה של xס"מ לעומת θ.
- עבור כל זווית יציבה מקסימלית (θ) שזוהתה בשלב 1.6, השווה את זרוע הרגע של משקל הסירה (
 ) ואת זרוע הרגע של כוח הציפה המשקם (
) ואת זרוע הרגע של כוח הציפה המשקם (  ). ייתכן שיהיה עליך לבצע אינטרפולציה בין הערכים שהושגו בשלב 3.7. האם אלה מאזנים בערך?
). ייתכן שיהיה עליך לבצע אינטרפולציה בין הערכים שהושגו בשלב 3.7. האם אלה מאזנים בערך?
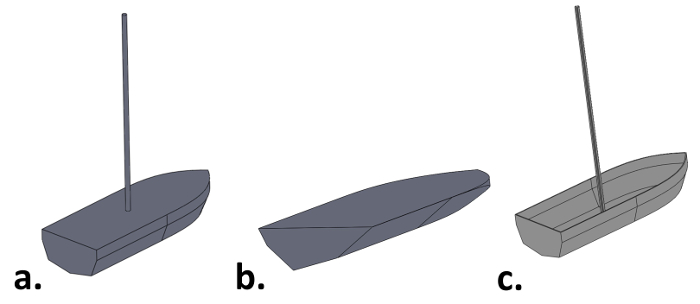
איור 3: א. מלא בדגם של גוף הסירה, ב. חיתוך אנכי של גוף הספינה, חושף את הנפח השקוע של כלי השיט, ג. דגם מדויק פיזית של כלי השיט.
4. חיזוי תקופת התנודה
- לייצר דגם CAD שני של הסירה עם המיקום של המשקל המתאים למקרים בשלב 2.1. הפעם דגם את העובי בפועל של גוף הספינה (כלומר,לא מלא, איור 3c). התאם את צפיפות החומרים לערכים בפועל.
- באמצעות תוכנה CAD "מאפייני מסה", להעריך את הרגע של אינרציה של הסירה על מרכז המסה שלה לאורך ציר הגליל (Izz) עבור גבהים משקל.
- באמצעות תוצאות של שלבים קודמים, ואת המיקום xשל מרכז הציפה נמדד כאשר
 (שלב 3.7), להעריך את תדרי התנודה התיאורטית:
(שלב 3.7), להעריך את תדרי התנודה התיאורטית: (2)
(2) - השווה את התוצאה התיאורטית של שלב 4.3 עם תדרי התנודה הנמדדים. האם ערכים אלה מסכימים באופן סביר?
Results
| מסה כוללת (m, קילוגרם) |
מרכז המסה (Hס"מ,מ') |
מרכז הציפה (  , מ ') , מ ')
|
רגע האינרציה (Izz, ק"ג2) |
| 0.088 (שלב 3.1) |
0.053 (שלב 3.2) |
0.0078 (שלב 3.7) |
0.00052 (שלב 4.2) |
טבלה 1. מאפיינים של סירה מודל עם 24 גרם משקל ממוקם 13 ס"מ מעל השדרית.
| שלב הליך | ערך ניסיוני | ערך חזוי |
| זווית גליל יציבה מרבית (1.6, 3.8) | ~ 25° | 28.5° |
| תדר גליל טבעי (2.2, 4.3) | 1.4 הרץ | 1.24 הרץ |
טבלה 2. זווית גליל יציבה מקסימלית ותדירות מתגלגלת של סירה עם משקל 24 גרם 13 ס"מ מעל השדרית.
Application and Summary
ניסוי זה הדגים את תופעות היציבות של כלי שיט צפים וכיצד ספינות יכולות להישאר זקופות גם עם מוקדי מסה גבוהים יחסית. לדוגמה, בתוצאות הייצוגיות, סירה מדגם קטן עם מרכז מסה (Hcm = 5.3 ס"מ) הרבה מעל קו המים(קו מים H~ 1 - 2 ס"מ) יכול לחזור למקומו זקוף לאחר שהיטה לזווית ~ 25 °. בניסויים נמדדה הזווית היציבה המרבית עבור סירת מודל עם מרכזי מסה אנכיים שונים. ההשפעה של מרכז גובה המסה על תדירות תנודה (גלגול) הוערכה גם. שתי המדידות הללו הושוו לערכים תיאורטיים שהושגו באמצעות פרמטרים גיאומטריים בחבילות CAD. תוצאות ונהלים אלה יכולים לשמש נקודת התחלה עבור סטודנטים המבקשים לעצב ולנתח מבנים צפים.
מאפיין היציבות חיוני לתכנון ותפעול של כלי שיט. ספינות הפועלות עם טיוטות רדודות (רוב כלי השיט מעל המים) הפחיתו את הגרירה ואת יכולת התמרון המוגברת. בכלי מטען גדולים, מכולות משלוח ניתן לערום גבוה מעל הסיפון העליון, הגדלת קיבולת המטען להקלה על פעולות טעינה ופריקה. באוניות שייט, טיוטות רדודות מאפשרות חלונות וסיפונים רבים לנוסעים. בעוד היציבות היא קריטית לבטיחות, צורות גוף יציבות מאוד  (גבוה) מניבות תדרי נדנדה מהירים (Eqn. 2), אשר עשוי להיות מהיר באי נוחות עבור הנוסעים. ניתוחי יציבות הידרוסטטית, כפי שהוכח בניסוי זה, הם אפוא כלים חיוניים להנחות הנדסה ימית.
(גבוה) מניבות תדרי נדנדה מהירים (Eqn. 2), אשר עשוי להיות מהיר באי נוחות עבור הנוסעים. ניתוחי יציבות הידרוסטטית, כפי שהוכח בניסוי זה, הם אפוא כלים חיוניים להנחות הנדסה ימית.
Tags
Skip to...
Videos from this collection:

Now Playing
יציבות של כלי שיט צפים
Mechanical Engineering
22.4K Views

ציפה וגרירה על גופים שקועים
Mechanical Engineering
29.9K Views

הנעה ודחף
Mechanical Engineering
21.6K Views

רשתות צנרת והפסדי לחץ
Mechanical Engineering
58.0K Views

מרווה ומרתיח
Mechanical Engineering
7.7K Views

קפיצות הידראוליות
Mechanical Engineering
40.9K Views

ניתוח מחליף חום
Mechanical Engineering
28.0K Views

מבוא לקירור
Mechanical Engineering
24.6K Views

שושנת ים של חוט חם
Mechanical Engineering
15.5K Views

מדידת זרמים סוערים
Mechanical Engineering
13.5K Views

הדמיה של זרימה בעבר גוף בלוף
Mechanical Engineering
11.8K Views

ג'ט פוגע בלוח נוטה
Mechanical Engineering
10.7K Views

שימור הגישה האנרגטית לניתוח מערכות
Mechanical Engineering
7.4K Views

מדידות של שימור המוני וקצב זרימה
Mechanical Engineering
22.6K Views

קביעת כוחות מניעה על לוח שטוח בשיטת אמצעי האחסון של הפקד
Mechanical Engineering
26.0K Views
Copyright © 2025 MyJoVE Corporation. All rights reserved