傾斜平板に衝突する噴流
概要
ソース: リカルド ・ メヒア アルバレスとコメディフランセーズ Hikmat ジャバー、機械工学科、ミシガン州立大学、イースト ランシング、MI
この実験の目的は、流体の流れが動圧の静圧への変換によって構造物に力を発揮する方法を示すことです。このため、フラットに衝突噴流をさせていただきますプレートし、プレートの結果の圧力分布を測定します。合力が圧力分布とプレートの表面に沿って適切に定義された地域格差の製品を統合することによって算出されます。この実験は、ジェットの方向板の傾斜の 2 つの角および 2 つの流量の繰り返されます。各構成は、プレートの表面に静圧を動圧変換のさまざまなレベルの結果である平板に沿う別の圧力分布を生成します。
この実験のため圧力でスキャンのバルブに接続されているダイヤフラム圧力トランスデューサーで測定されます。プレート自体は、ホースを通してスキャンのバルブに接続する圧力タップと呼ばれる小孔を持っています。スキャンのバルブは、一度に 1 つ圧力トランスデューサーにこれらの蛇口からの圧力を送信します。圧力はダイヤフラム圧力トランスデューサーを電圧に変換する機械的変形を誘導します。この電圧は横隔膜の両側の圧力差に比例します。
原則
定常非圧縮性流れでは重力ポテンシャルのごくわずかな変化に、ベルヌーイの式は、エネルギーの 2 つのフォームの追加として解釈されるかもしれません: 運動エネルギーとポテンシャル エネルギーの圧力。エネルギーのこれらのフォームは、非粘性プロセス初期総エネルギー量を一定維持しながら流線に沿って互いに変換する無料。このエネルギーの合計は、ベルヌーイの定数と呼ばれます。便宜上、次元同質 [3] の原理を用いた圧力の次元でベルヌーイの式を表現できます。この次元の変換の下で運動エネルギーに関連する用語は「動圧」と呼ばれる圧力の潜在的なエネルギーに関連付けられている用語は「静圧」と呼ばれる、ベルヌーイの定数"停滞圧力」と呼びます。後者の場合は停止にすべての動圧を静圧に変換によってもたらされる流れに達する最大圧力として解釈できます。これらの原則より良い Bernoulli の同等化の次の形式で記述できます。
 (1)
(1)
どこ 静圧は、
静圧は、 は動圧と
は動圧と 停滞圧力です。図 1 (a) は現在の実験の概略図を示します。空気ジェット終了幅のスリットを高圧チャンバーから示すように、 W 、 Lをレシーバーという低い圧力で密閉された空間に 。受信機は実験のためのテスト セクションとして機能する小さな部屋です。データ収集装置とは、こんなものを併設しています。いくつかの距離のための後、ジェットは平板にジェットの軸との角度は、レシーバー内に入射します。図 1 (a) は、3 つの合理化によって説明されていのジェット。中間の合理化は、上向きに偏向を取得し、下方に偏向を取得しますの 2 つの領域でジェットを分割します。分割流線型に偏向がない取得、以来停滞ポイントとして知られているもので壁にそれを停止します。その時点で、すべての動圧を静圧に変換され、圧力、最大レベルに達すると。漸進的により少なく動圧が静圧に変換されるため、圧力レベルは停滞ポイントから減る。
停滞圧力です。図 1 (a) は現在の実験の概略図を示します。空気ジェット終了幅のスリットを高圧チャンバーから示すように、 W 、 Lをレシーバーという低い圧力で密閉された空間に 。受信機は実験のためのテスト セクションとして機能する小さな部屋です。データ収集装置とは、こんなものを併設しています。いくつかの距離のための後、ジェットは平板にジェットの軸との角度は、レシーバー内に入射します。図 1 (a) は、3 つの合理化によって説明されていのジェット。中間の合理化は、上向きに偏向を取得し、下方に偏向を取得しますの 2 つの領域でジェットを分割します。分割流線型に偏向がない取得、以来停滞ポイントとして知られているもので壁にそれを停止します。その時点で、すべての動圧を静圧に変換され、圧力、最大レベルに達すると。漸進的により少なく動圧が静圧に変換されるため、圧力レベルは停滞ポイントから減る。
衝突角度に応じて ( 図 1)、停滞ストリーム ラインは、異なる経路を辿ります。とき
図 1)、停滞ストリーム ラインは、異なる経路を辿ります。とき 、ジェットの中心線も停滞ストリーム ラインです。としてが減少、停滞合理化ジェット機の中心線から離れて移動開始ジェットの外側のエッジに近い軌道に向かって。その結果よどみ点が小さい値の他の軌道と比較して圧力の最大値に達する 90oも最大速度、エルゴ最大動圧の軌道なので。要約すると、圧力プロファイルの衝突角度の効果はその最大値を減らすし、ジェットの出口に近いプレートの領域に向けてピークを転置します。
、ジェットの中心線も停滞ストリーム ラインです。としてが減少、停滞合理化ジェット機の中心線から離れて移動開始ジェットの外側のエッジに近い軌道に向かって。その結果よどみ点が小さい値の他の軌道と比較して圧力の最大値に達する 90oも最大速度、エルゴ最大動圧の軌道なので。要約すると、圧力プロファイルの衝突角度の効果はその最大値を減らすし、ジェットの出口に近いプレートの領域に向けてピークを転置します。
図で破線 1 (a) はジェットにさらされるプレートの表面に沿ってネット圧力分布を表します。図から注合計圧力プレート、1(B)  、周囲圧力の付加である
、周囲圧力の付加である 、プラスの衝突圧力や重圧、
、プラスの衝突圧力や重圧、  。周囲の圧力が均一に配布されるので、それがキャンセルされ、プレートの負荷は厳密に、重圧の結果。この圧力分布が実験的に決定し、次の積分によるとプレートの純負荷を推定するために使用します。
。周囲の圧力が均一に配布されるので、それがキャンセルされ、プレートの負荷は厳密に、重圧の結果。この圧力分布が実験的に決定し、次の積分によるとプレートの純負荷を推定するために使用します。
 (2)
(2)
実験データは離散、台形規則または Simpson の規則 [4] を使用してこの積分を推定できます。
さらに、流体を高圧領域から孔またはスリットを通して低圧領域に放電すると、発行元のジェット最初縮みと呼ばれる地域に収束する傾向がある (参考図 1 を参照) と、発散。その後 [5] 排出口から流れる。ジェットは流線が平行になるその排出口を出た後、縮みは実際に最初の場所です。したがって、これは、静圧に等しい [5] 周囲の圧ジェットに沿って最初の場所です。現在の実験では、充満は高圧の地域と受信機は低圧域。さらに、充満の中速度はごくわずかと非常に良い近似で停滞している言えます。したがって、式 (1) される可能性がありますとして下大静脈契約で速度を決定する次のよう。
 (3)
(3)
ここでは、 充満および受信機の圧力違いです。一般的には、スリットの幅と縮みの収縮の比率は非常に約 [5, 6, 7]。
充満および受信機の圧力違いです。一般的には、スリットの幅と縮みの収縮の比率は非常に約 [5, 6, 7]。
 (4)
(4)
(3) したがって、質量流量を推定できると (4) 次のように。
 (5)
(5)
ここでは、  縮みの領域です。
縮みの領域です。

図1.基本的な構成の模式図。平面噴流幅のスリットを通して受信機に充満を終了する W。傾斜平板にジェットが当たるし、それは表面 (破線) の圧力負荷を発揮しながら偏向を取得します。この図の拡大版を表示するのにはここをクリックしてください。
手順
1. 施設の設定
- 施設内に流れがないことを確認します。
- 図 2 の回路図によると楽器を設定します。
- 目的の角度にプレートを調整。表 1 にこの値を記録します。
- ・ Wジェット ノズル幅を測定します。表 1 にこの値を記録します。
- プレート スパンl.記録表 1 にこの値を測定します。
- 圧力トランスデューサー、ゼロします。
- Mp (Pa/V)、圧力トランスデューサーの校正定数を注意してください。表 1 にこの値を記録します。
- トランスデューサーの高圧ポートに接続 (としてマーク +)、チャンバーの圧力タップする (としてマーク
 )。
)。 - すべての操作は、レシーバー内の場所を取る、のでまま (- としてマーク) 探触子の低圧ポート開いている受信機の圧力を感知する ()。
- フロー機能 (FLL) を開始します。
- デジタル マルチ メーターを使用して電圧を記録
 (V)、充満および受信機の圧力トランスデューサーによって検出される差圧に関連付けられています。表 2 には、この値を記録します。
(V)、充満および受信機の圧力トランスデューサーによって検出される差圧に関連付けられています。表 2 には、この値を記録します。 - 1.7 から校正定数 mpを使用して充満と受信機の間の圧力差を確認 (
 )。表 2 ではこの値を記録します。
)。表 2 ではこの値を記録します。

図 2。データ集録システムの詳細。機器接続図。この図の拡大版を表示するのにはここをクリックしてください。
表 1。実験的研究のための基本的なパラメーターです。
| パラメーター | 値 |
| ジェット ノズル幅 (Wn) | 41.3 mm |
| プレート スパン (L) | 81.3 cm |
| プレートの高さ (H) | 61 cm |
| 探触子の校正定数 (m_p) | 137.6832 Pa/V |
2. 実験の実行
- トランスデューサーの高圧ポートに接続 (としてマーク +) 走査型バルブの共通ポートに。(としてマーク) 探触子の低圧ポートのままに受信機の圧力を感知するオープン ()。
- ホーム最初の圧力から、測定を開始するスキャンのバルブの位置をタップします。
- トラバースVI (LabView の仮想計測器) を実行します。
- VI の校正定数 mpを入力します。
- 100 Hz と 500 (すなわち 5 秒のデータ) にサンプルの合計するには、サンプリング レートを設定します。
- 入力 VI の位置 (
 ) のデータの取得元でプレートの圧力圧力タップ。圧力タップが 25.4 mm 間隔が考慮に入れます。したがって、位置になります
) のデータの取得元でプレートの圧力圧力タップ。圧力タップが 25.4 mm 間隔が考慮に入れます。したがって、位置になります mm、
mm、 のタップの 0 から始まるインデックスです。
のタップの 0 から始まるインデックスです。 - データを記録します。VI は圧力タップと受信機の間の圧力差を読んで (
 。
。 - 次のタップ位置にステップ スキャンの弁。
- 手順 2.6 から 2.8 を繰り返して、すべての圧力タップが走査されます。
- 最後に、VI はテーブルとタップ位置対圧力のプロットを提供します。
- VI を停止します。
- 近くの流路面積約半分 (参考図 3を参照) にフロー コントロール プレートの位置を変更します。これは流量を変更します。この流量の値を決定するのに式 (5) を使用します。
- フロー コントロール プレートの新しい位置の 2.11 に 2.3 の手順を繰り返します。
- 衝突板の角度を変更し、フロー コントロール プレートを初期位置に設定します。
- 45o、oの 50、60o70o80o2.14 に 2.3 の手順を繰り返します。

図 3。実験の設定。テスト ・ セクション。左: 衝突板スリットの前に。このスリットを通して受信機に換気口から高圧空気を放出します。中央: 衝突板に接続されて圧力タップは、一度にスキャン 1 つサンプル バルブに分散されます。受信機放電前右: 衝突プレート。放電が流量を調節する多孔板。この図の拡大版を表示するのにはここをクリックしてください。
3. 分析
- 各傾斜角度の両方の流量の圧力データをプロットします。
- 式 (2) に基づくプレートの力を推定するのに実験データを使用します。
- 式 (3) を使用して縮みでジェットの速度を決定します。
- 式 (5) を使用して質量流量を推定します。
結果
図 4は、2 つの異なる角度で 2 つの異なる流量プレート平面噴流の得られた結果の 4 つのセットを示しています。実際には、探触子の低圧側が受信機に開かれる、ためその朗読過圧のみに対応している。 、図 4に示す点であります。
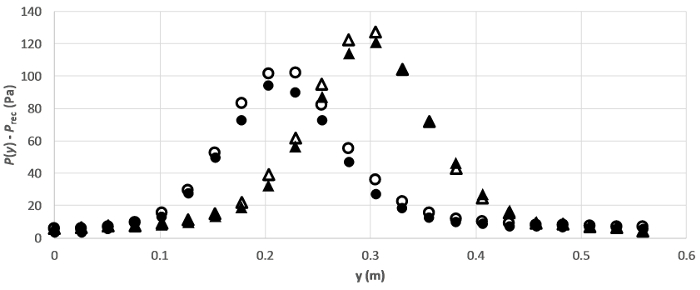
図4.代表的な結果。2 つの角および 2 つの流量の平板に沿う圧力分布。シンボルを表す:  :
:  ,
,  m/s;
m/s; : ,
: ,  m/s;
m/s; :
:  , m/s;
, m/s; : , m/s.
: , m/s.
図 4によると 90o衝突のプロファイルは 70o衝突のものよりも高くなっています。この現象の理由は前者で停滞合理化が対応のピーク速度およびその結果最大動圧の合理化は、流れの中心線に。停滞合理化ピーク速度ラインから移動し、として元のパスから曲がる間、衝突角度は減少します。この効果は図 1(A)、スケッチ、またなぜ圧力プロファイルのピーク圧力プレートの中心から離れて移動する理由。
予想通り、最大圧力は運動エネルギーの一般的な減少があるし、それ故に流れと動圧の速度は低下するので流量 (図 4 の終了記号) で減少します。この最大圧力は実際に停滞圧力の測定、前に説明しました。これはの正確な測定、噴流 90oでプレートの場合は、停滞の合理化、ジェットのエルゴを中心線と一致にする圧力タップのため。しかし、図 1 a に提案した、停滞合理化は衝突角度の減少として元のパスから 。この新しい条件の下でこのストリーム ラインがその衝突の場所で圧力タップと一致する保証はありません。ピーク圧が 90oはへの近似だけ異なる衝突角度で観察したがって、 。
表 2 は、2 つの異なる衝突角度と流量の測定の実験で得られた結果を示しています。
テーブル2.代表の結果。
| パラメーター | 1 を実行します。 | 2 を実行します。 | 3 を実行します。 | 4 を実行します。 |
| プレート角 (θ) | 90o | 90o | 70o | 70o |
| デジタル マルチ メーターの読み取り (E) | 2.44 V | 2.33 V | 2.44 V | 2.28 V |
| 差圧 (P_pl-P_rec) | 335.95 Pa | 320.80 Pa | 335.95 Pa | 313.92 Pa |
| 縮み (V_VC) での速度 | 10.14 m/s | 9.91 m/s | 10.14 m/s | 9.81 m/s |
| 質量流量率 ((m)) ̇ | 0.254 kg/s | 0.249 kg/s | 0.254 kg/s | 0.246 kg/s |
| 停滞圧力 (P_o) | 127.16 Pa | 121.19 Pa | 101.78 Pa | 94.31 Pa |
| ロード プレート (F) | 16.84 N | 16.24 N | 14.11 N | 12.32 N |
申請書と概要
本特集実験実証圧力の相互作用とを生成する速度が動圧の静圧への変換によるオブジェクトの負荷。これらの概念は、2 つの異なる角度で 2 つの異なる流量平板平面噴流と示されました。実験は明らかに負荷がよどみ点、すべての動圧を静圧に変換される、動的から静的な減少から離れて位置への変換レベルにつれて、その大きさで最高を示してください。よどみ点。入射角動圧の低レベルを運ぶストリーム ラインを中心線 (最大) 速度と 1 つの一致から停滞圧力を移るので総負荷の軽減の効果があります。
これらの実験はまた流れに数値圧力タップから得られたデータを統合することによって公開されるオブジェクトの合計負荷を決定する方法を示すという目的を提供しています。また、動圧を静圧に逆変換はまた速度とジェットの質量流量を推定する使用されました。その結果、圧力および速度の相互作用は、気流診断に使用できます。
本実験では取り上げていない概念はピトー - 静的プローブによる流速測定法です。これらは直接縮みで速度を特定する式 (3) に使っていたものはまさに停滞と静圧の差を測定プローブです。少なくとも 90o角皿、中心気圧タップ直接にさらされてそれにピトー プローブを作るよどみ点に注意してください。直接測定圧力トランスデューサーは、各圧力タップすると、受信側の圧力の圧力を比較するので、結果には 。式 (3) でこの測定値の置換、時に結果は停滞ポイントに近いがその影響半径以外まだ停滞ストリーム ライン上の点の速度です。この測定は、停滞ストリーム ラインの時点の正確な位置がわからないために、この実験では使用が制限です。
。式 (3) でこの測定値の置換、時に結果は停滞ポイントに近いがその影響半径以外まだ停滞ストリーム ライン上の点の速度です。この測定は、停滞ストリーム ラインの時点の正確な位置がわからないために、この実験では使用が制限です。
前に述べたように、圧力測定は流れの速度を決定する使用できます。記載アプリケーションで充満と受信機の間の圧力の変化は、縮みで平均速度を推定するのに十分だった。、ちなみに、よどみ点と一致圧力タップはピトー管プローブと組み合わせて使えるセンシング フロー速度を特定する静圧も言及した式 (3) から (代入と と)。実際、ピトー プローブとプラントル管として知られている、静的プローブを組み合わせた単一のデバイスには、流体速度を測定する工学の最も拡張診断装置があります。図 5 のように、このプローブは、2 つの同心の管によって構成されています。インナー チューブに停滞圧力を検出するフロー直面しているし、アウター チューブ側のポートのセットがありますその意味静圧。センサー圧力トランスデューサーまたは液柱圧力計を使用してこれら 2 つの違いを決定など圧力式 (3) から速度を推定する (再度、代入ととと)。これ、またはピトーの組み合わせのようなプローブと独立した静的プローブは、航空機に対する風の速度を決定する飛行機で実際に使用します。
と)。実際、ピトー プローブとプラントル管として知られている、静的プローブを組み合わせた単一のデバイスには、流体速度を測定する工学の最も拡張診断装置があります。図 5 のように、このプローブは、2 つの同心の管によって構成されています。インナー チューブに停滞圧力を検出するフロー直面しているし、アウター チューブ側のポートのセットがありますその意味静圧。センサー圧力トランスデューサーまたは液柱圧力計を使用してこれら 2 つの違いを決定など圧力式 (3) から速度を推定する (再度、代入ととと)。これ、またはピトーの組み合わせのようなプローブと独立した静的プローブは、航空機に対する風の速度を決定する飛行機で実際に使用します。
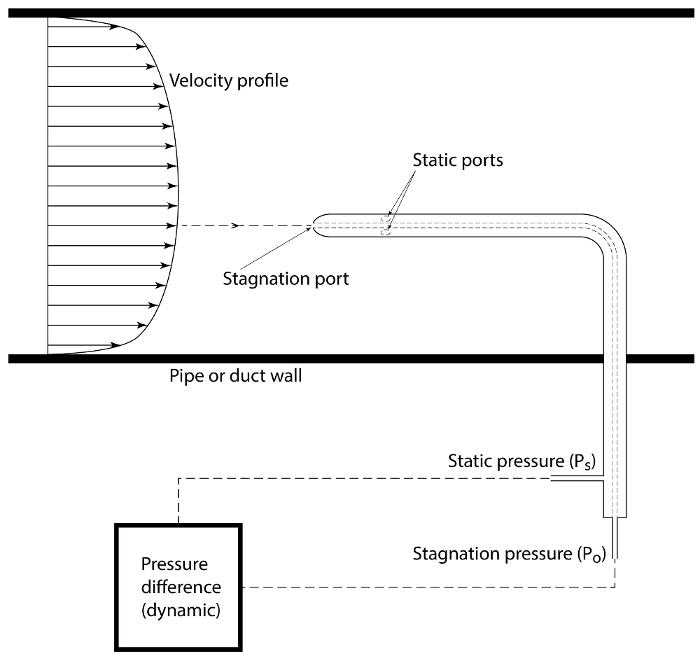
図5.流れの流速計です。ピトー静圧 (またはプラントル) プローブ動圧に基づく速度分布を決定します。このプローブは、別の位置での速度を判断する流れ場を横断します。この図の拡大版を表示するのにはここをクリックしてください。
参考文献
- Arnau, A. (ed.). Piezoelectric transducers and applications. Vol. 2004. Heidelberg: Springer, 2004.
- Tropea, C., A.L. Yarin, and J.F. Foss. Springer handbook of experimental fluid mechanics. Vol. 1. Springer Science & Business Media, 2007.
- White, F. M. Fluid Mechanics, 7th ed., McGraw-Hill, 2009.
- Chapra, S.C. and R.P. Canale. Numerical methods for engineers. Vol. 2. New York: McGraw-Hill, 1998.
- Buckingham, E. Note on contraction coefficients of jets of gas. Journal of Research,6:765-775, 1931.
- Munson, B.R., D.F. Young, T.H. Okiishi. Fundamentals of Fluid Mechanics. 5th ed., Wiley, 2006.
- Lienhard V, J.H. and J.H. Lienhard IV. Velocity coefficients for free jets from sharp-edged orifices. ASME Journal of Fluids Engineering, 106:13-17, 1984.
タグ
スキップ先...
このコレクションのビデオ:

Now Playing
傾斜平板に衝突する噴流
Mechanical Engineering
10.7K 閲覧数

浮力と浸漬のボディ ドラッグ
Mechanical Engineering
29.9K 閲覧数

浮動のコートの安定性
Mechanical Engineering
22.4K 閲覧数

推進力と推力
Mechanical Engineering
21.6K 閲覧数

配管ネットワークと圧力損失
Mechanical Engineering
58.0K 閲覧数

焼入れと沸騰
Mechanical Engineering
7.7K 閲覧数

油圧ジャンプ
Mechanical Engineering
40.9K 閲覧数

熱交換器の解析
Mechanical Engineering
28.0K 閲覧数

冷凍入門
Mechanical Engineering
24.6K 閲覧数

熱線
Mechanical Engineering
15.5K 閲覧数

乱流を測定
Mechanical Engineering
13.5K 閲覧数

鈍頭物体まわりの流れの可視化
Mechanical Engineering
11.8K 閲覧数

省エネルギー システムの分析方法
Mechanical Engineering
7.4K 閲覧数

質量保存則と流量率測定
Mechanical Engineering
22.6K 閲覧数

制御体積法による平板の衝突力の測定
Mechanical Engineering
26.0K 閲覧数
Copyright © 2023 MyJoVE Corporation. All rights reserved