
Method Article
マウスで本能的な防衛中に空間記憶の役割を調査するため行動分析
要約
このプロトコルを記述するバーンズ迷路テストに基づいて、行動分析、空間環境の知識によって変更される操作方法本能的な防衛を研究します。
要約
進化は、すべての動物種の間で生存に欠かせない防衛行動のレパートリーを選択しています。これらの動作は本質的嫌悪の感覚刺激への応答で誘発されるステレオタイプ化された操作ではしばしば、彼らの成功は、急速に変化することができます別の空間環境に適応するため十分な柔軟性を必要とします。ここでは、マウスで防衛行動に関する学習空間知識の影響を評価する行動分析について述べる.我々 は、マウスは新奇環境における本質的嫌悪感覚刺激に対する応答を脱出中に避難所に移動する方法と、彼らは環境に急性の変化に適応する方法を調査するため広く使用されているバーンズ迷路空間記憶アッセイを適応しています。この新しいアッセイは、トレーニングを必要としない、自然探索パターンとマウスのナビゲーション戦略を悪用子豚パラダイムです。ここで説明されているプロトコルのセットが目標に向けられた行動と本能行動と空間記憶の両分野に関心のあるべき刺激トリガー ナビゲーション研究の強力な手段であることを提案します。
概要
主として、本能的な防衛行動はハードワイ ヤードの脅威ソース1から動物の移動で魚や両生類、C スタートの動きなどの刺激応答と見なされます。ただし、防衛行動は現在の環境について学んだアカウント情報に柔軟にとる場合より適応することができます。このような柔軟性の 1 つの例は、環境2,3の避難所の存在の有無について事前の知識によっての脅威に直面したときの齧歯動物によって示されている凍結するエスケープからスイッチです。生得的行動の柔軟性の他の例フライト開始しきい値を適応を含めるまたは獲物とその避難所4の間の距離に応じて速度を脱出、距離脅威5,6と以前の経験11,12同様、7の有害な刺激の知覚の特性に応じて異なる防御的な戦略を選択するやも飢え8、など競合する動機に直面して防衛的な行動を抑制する9,10。環境の空間的特徴に関する知見に行動選択の依存関係は、目標選択、空間記憶とナビゲーションを研究するための強力なモデルのマウス、本能的な防衛行動です。ここでは、一般的に使用される行動作業の適応について述べる、バーンズ迷路 (BM) 空間メモリ分析13、マウス、防衛的な行動選択とナビゲーション方略に及ぼす空間環境を決定するとき避難所へ逃げた。
マウスにおける学習と空間記憶を研究するために使用する標準的なバーンズ迷路から成っている 20 の均等に間隔をあけられた穴は、19 が閉じていると 1 つマウスを求めるオープン フィールドを避けるために地下シェルターにつながる循環 ~ 90 cm 直径プラットフォームプラットフォームの環境。多くの場合、弱い刺激 (ブザー、明るい光、ファン) は環境を嫌悪する、従って避難所14への参入を促進するために継続的にアッセイ中に使用されます。最も一般的に使用される試金の15,16で動物はどこに案内される避難所に手動で実験者プラットフォームに位置することの直後に一つ慣れの試験を持っています。これは、毎日 3 分の迷路の中で自由に移動するマウスを使用後再び手動でに案内され避難所それが探鉱期間中にそれを到達しない場合 4 日間獲得期間が続いたが。アッセイの最後の段階は、1 プローブ試験 5 日目(ただし、長期 7 日間記憶の試験が行われることも) 動物が閉じたすべての穴で迷路を探検です。学習と長期的なメモリ プローブ試験で避難所閉鎖孔付近の時間、取得期間中に間違って穴の避難所とポークを検索にかかった時間によって量を示されます。典型的な結果は、エラーと、集録時に避難所に到達する待機時間の数およびプローブ試験15で閉じたターゲットの穴を含む腹部に費やした時間のチャンスの上割合の減少を示します。
BM の試金のいくつかの変種が前述の17,18,をされている19, 我々 はここで説明するパラダイム標準試金から 3 つの根本的な変更を持っています。最初に、動物が迷路を探索し、独自に避難所を見つけるに任され、テストは動物が探索行動に従事している期間中に、避難所を発見されている直後に、同じセッションで行われます。ただし、この設定では、避難場所の長期記憶はテストされません、捕食の脅威の下の新しい領土の探査を模倣する自然主義的なシナリオをするものです。さらに、それは動物が環境の突然の変化など、環境に急性の変化に適応する方法のテストことができます。第二に、我々 の分析の重要な側面は、実験者が決してまたは動物を戸惑わせることができますし、除外可能なナビゲーション戦略21としてパス統合20避難所からの動物を強制的にです。パスの統合はモーターの流出の統合から生じる感覚と前庭の手がかりなどの自己運動の手がかりを使用して動物の現在の位置を更新し、不可能の目標に向かって移動するナビゲーション戦略場合、動物実験者による受動的移動します。避難所は継続的な採餌行動と簡単に区別でき、評価と特定のナビゲーション方略の定量化への脱出を引き出すために本質的嫌悪 visual22と23の聴覚刺激を使用私たち第三に、差し迫った脅威から防衛中この試金は選択範囲の空間のメモリの役割と、守備の動作の実装を解剖するため役に立つでしょうしより一般的より広範な研究に目標指向ナビゲーションと短期の空間記憶を提案します。ここで説明されているプロトコルは、谷らによって導入されました。2017 年に、我々 は実験と結果の理論的根拠の深さの議論の詳細について読者を参照します。
プロトコル
1986 (PPL 70/7652) ローカル倫理的な承認の英国動物 (科学的なプロシージャ) の行為の下ですべての実験を行った。
1. 行動の装置のセットアップ
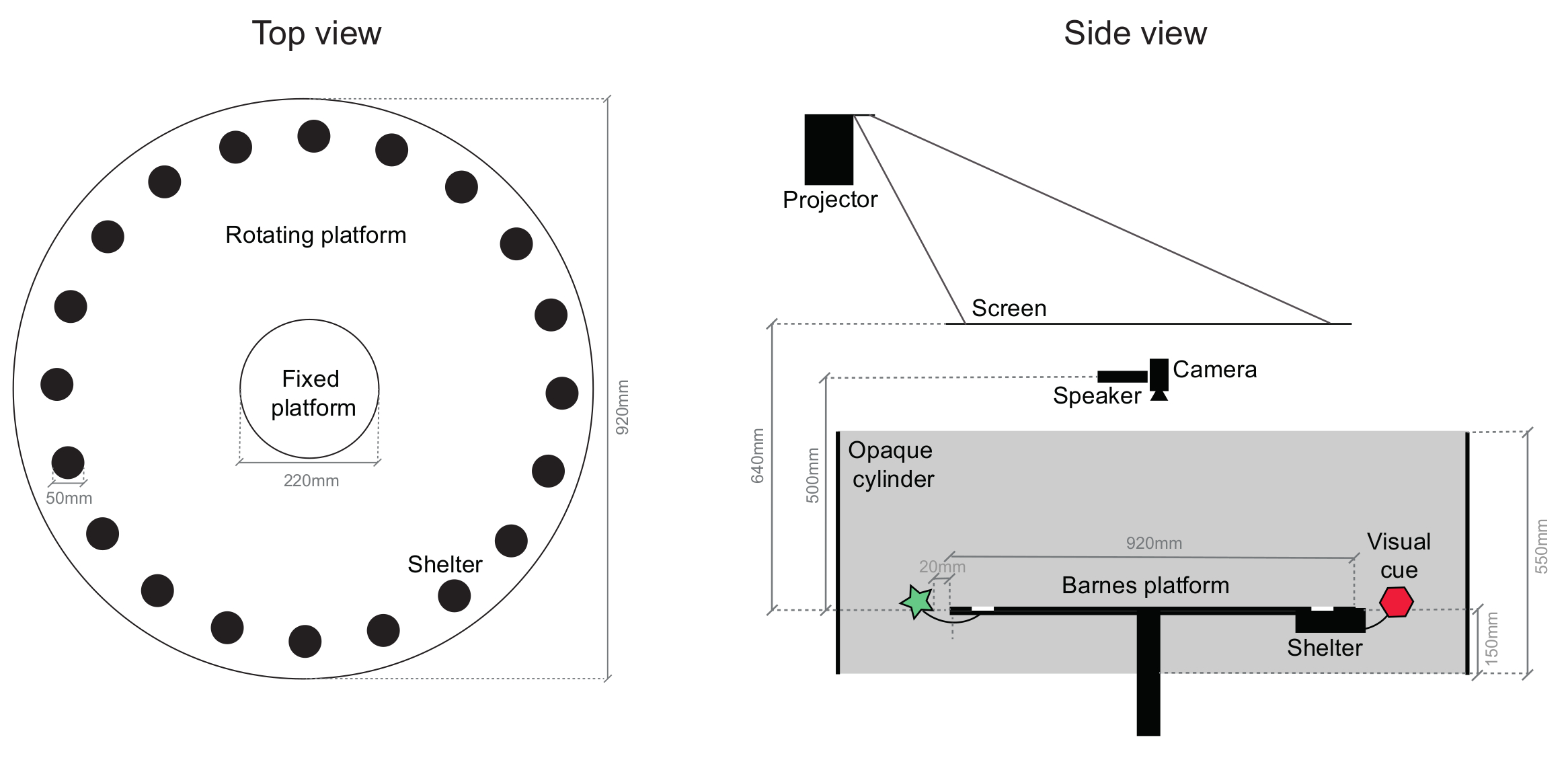
注: 行動の装置の主要なコンポーネントはバーンズ迷路13から成る 20 等距離の白いアクリル円形プラットフォーム (直径 92 cm)、直径 5 cm、円形の穴、放射状、あるプラットフォームの端から 5 cm のバリアント.これらの 19 は、パースペックス シェルター (寸法 15 x 5.8 x 4.7 cm) マウスの開始および終了することができます簡単に黒になりますが残りの穴に黒プラスチック プラグ (5 mm 深い) で閉じる必要が。アリーナの中央部は固定円形プラットフォーム (直径 22 cm) で構成され、周囲がコンピューター制御されたステッピング モーターを 360 ° 以上回転を可能にするフレームにマウントされています。プラットフォームは、降りてからネズミを防ぐために床から高架の 45 cm です。図 1に概略図を参照してください。
- 添付視覚的な手掛かり (異なった形、色およびパターンを持つ 2D または 3D シンボル)、プラットフォームの周縁部にマウスがそれらに達することを防ぐために端から少なくとも 2 cm。
注: 視覚的な合図の例としては、262 cm2、または斜めの紫色の縞で塗りつぶされた円形 (直径 15.5 cm) の青い正方形普通です。 - ローカル嗅覚キューとして避難所の内側にマウスの家-ケージから寝具の ~ 2 g を追加します。必要に応じて、ローカル視覚ランドマーク キューを提供するために避難所の入り口に発光ダイオード (LED) を配置します。
- 外部からマウスを分離するには、遠位の視覚は 40 cm 上とアリーナは、プラットフォームの端から 10 cm の位置の周りのプラットフォーム表面の下 15 cm 拡張する八角形または円筒形の壁を組み立てます。
- 超音波スピーカー 50 cm 聴覚刺激を提供するためのプラットフォームの中心の上の位置します。
- プロジェクターを使用してバック プロジェクト オーバーヘッド嫌悪刺激にアリーナ上 64 cm 半透明のスクリーンを配置します。
- プロジェクターで提供されるライトが照らす行動装置;プラットフォーム面の中心に 5-10 lx があるようにそれを校正します。ロングパス ・ フィルターで赤外線ライトと、プラットフォーム上の赤外線カメラを配置 (> 700 nm) プロジェクター取得ビデオのちらつきを防ぐために。
- 市販のソフトウェアまたは適切なアルゴリズムを使用してオンラインでのマウスの位置を追跡します。ホワイト アリーナの黒マウスを追跡、マスク重心の計算に続いて閾値操作が適切です。
- 理想的には、外部の手がかりが実験に影響を与えるを防ぐために、遮音とライト ボックス内行動の装置を配置します。
2. 本質的嫌悪刺激を提供します。
注: 以下の刺激は、LabVIEW および Matlab を含む別のソフトウェア パッケージの広い範囲で生成できます。
- 視覚刺激
- アリーナ上 64 cm に配置画面に刺激をプロジェクトします。刺激は、灰色の背景の22の直線的拡大暗い円 (ウェーバー コントラスト =-0.98、輝度 = 7.95 cd/m2)。
注: 標準的なサークル 3枚視角 2.6 ° 発症時のマウスの位置の真上集中理想的にし、47.4 °、それはオフセットの前に 250 ms のままに 200 ms を超える 224 °/s で直線的展開します。 - 視覚の刺激を提供するときは、マウスの上センターします。これは、マウスが分野では、定義済みの領域を通過するまで待っていることによってまたは、オンラインのマウスの位置を追跡し、追跡座標を使用して、円の中心を定義する達成することができます。
注: マウスの上に直接視覚刺激を投影する示唆している私たちが、防衛行動できますも誘発される場合 (間まだ床に平行) マウス前同じ刺激を投影します。私たちの経験ではこれは場合少なくともマウスの位置前 30 cm までです。
- アリーナ上 64 cm に配置画面に刺激をプロジェクトします。刺激は、灰色の背景の22の直線的拡大暗い円 (ウェーバー コントラスト =-0.98、輝度 = 7.95 cd/m2)。
- 聴覚刺激
- 3 周波数変調アップ-スイープで 17 から 20 kHz23の鉄道 3 以上から成る刺激をトリガー s、9 を永続的な合計で s。プラットフォーム レベルで測定した音圧レベル (SPL) は 73 と 78 dB 間の範囲でなければなりません。
- 聴覚の刺激を提供する超音波スピーカー、アリーナの上に位置するサウンド カードとアンプを接続します。
3. 動物:
- 6 ~ 24 週間の古い、男性または女性の c57bl/6 j マウスを使用します。12 h ライト上の動物は食事と水に無料アクセス サイクルを維持します。
- 確保する行動分析とテスト サイクル ライトの光フェーズ中にそれらの前に少なくとも 72 時間を収容、マウスが 1 つ。
注: 我々 はシングル収納マウスのベースラインの探索行動がより匹敵するよりも、動物にマウスのグループは建物全体を見つけます。さらに、神経活動記録や操作は頻繁に外科のインプラントを持つ動物が、単一する必要があります、それは従って同じ住宅条件でコントロール データセットがあると便利することができます。
4. 標準行動分析:
- 細心の注意と 70% のエタノールまたは酢酸不要な嗅覚の手がかりを削除するフォームの表面をきれいに。水避難所を洗い、70% エタノールで洗浄後それは再度エタノール臭を軽減するために水で洗浄する必要があります。
- それが濡れている場合、シェルターに入るマウス可能性があります避けるためとしてプラットフォームと避難所を徹底的に乾燥します。
- 実験の前にプラットフォームを回転させることにより各試験のためのプラットフォームに、避難所の場所をランダムに。避難場所はアリーナに据えつけられるでしょうが、行動装置筐体に関連して回転します。
- その家の檻の中で実験室にマウスを持って行くと 10 分順化期間テスト プラットフォーム上にケージを置きます。
- ホーム-檻からマウスを取り外して、しっぽを取得するを避けるため: それをカップまたは解除することができます濃縮項目に上ること。尻尾をマウスを選ぶ不安レベルを高めるために表示されている、従って脅威の24の行動応答に影響する可能性があります。
- 優しく、アリーナの中央にマウスを置くし、ビデオ集録を開始します。
- その中に有害な刺激の提示がない 7 分馴化期間を可能にします。マウスに十分な時間を見つけるし、少なくとも一度避難所を入力してください。四肢全てが避難所の内側場合エントリとして検討してください。7 分は、見つけると避難所を入力、これが起こらない場合に、少なくとも 1 つの入口を確認するまで 5 分の追加のピリオドで慣れ期間の延長にマウスの大半のために十分にする必要があります。
- ライブ ビデオ フィードを観察することによって手動で、または自動的に、オンライン動物の位置を追跡し、予め定義されたトリガー刺激配信の分野で関心領域に嫌悪刺激 (聴覚または視覚) の配信をトリガーします。一度動物に到達します。視覚刺激は、通常、座標をトラッキングするオンライン ビデオを使用して動物の上に直接配信されます。
- 同じセッションで 1 つ以上の脱出の応答を引き出すために自主的避難所を残すマウスをしましょう。マウスが最後の嫌悪刺激、別の刺激を提示する前に待機、少なくとも 60 秒の時に避難所に正常にエスケープしていないかどうか。
- 分析が終了すると、その家ケージに動物を返します。同じマウスのさらなるテストが必要な場合は、再テストする前に、少なくとも 48 時間を待ちます。
- プラットフォームと次の動物をテストする前に手順 4.1 と 4.2 で説明した避難所を掃除します。
注: 手順 5、6 および 7 は、標準的な行動のアッセイの独立したバリエーション、それぞれは個別に実行できます。
5. ' ナビゲーション戦略' 行動分析:
注: この試金の目標は、避難行動を導くためにマウスが使用してどのような手がかりを決定することです。このアッセイでは、マウス固定アリーナ センターでは、避難所、避難所の内部にある嗅覚の手がかりとプラットフォームに接続されている近位の視覚上の手掛かりを半径方向変位がプラットフォームの可動式の外側の部分が回転します。マウスは以下の避難所に移動するために回転されているキューのいずれかの場合それは正しく、避難所の新しい場所に逃げていくでしょうが、避難所の前の位置に移動それは場所に残っている他の手がかりを使用している場合。
- 標準行動アッセイの上記のベースラインとして使用される少なくとも 1 つの飛行応答を引き出す 4.1 に 4.8 の手順に従います。
- 積極的に避難所を残すし、プラットフォームの中心部に移動してマウスをしましょう。探査を奨励し、中央のプラットフォームで動物を飼う中心の寝具と小皿を置き、プラットフォームの外側の部分の回転を許可するのに十分な長さ。マウスはシェルターの中でプラットフォームの回転の前に成功した脱出の後、料理や寝具を追加します。マウスがエスケープ応答中に避難所を入力する場合は、自主的避難所を入力し、料理や寝具を追加するそれを待ちます。
- ステッピング モーターを使用して、プラットフォーム、少なくとも 36 度 (2 つ穴) を回転させるし、脱出の応答を引き出すために感覚的な刺激をすぐに使用します。回転が驚愕をトリガーし、脱出の応答を開始するも可能です。
注: 我々 の経験からマウスの ~ 55% 実行されます中央 (非回転) プラットフォームの外外部部分が回転してまだ、これらの試験は、分析から除外すべき。 - プラットホームおよび避難所をきれいにし 4.10 と 4.11 の手順の説明に従って、ホーム ケージに戻します。
6.「動的環境」行動分析:
注: このアッセイは、マウスが環境の急激な変化に防御行動を適応する方法を評価する設計されています。少なくとも 1 つの脱出の応答を引き出すことの後のこれらの実験で避難所の場所が変更され、マウスが応答をトリガー後続エスケープする前にそれを訪問する許可されています。マウスは完全に避難所の新しい場所を更新し、前の場所に、避難所の不在を計算する場合、は、新しい場所にエスケープする必要があります。そうでなければ、かない避難所の新しい場所を記憶している、それは両方の場所を記憶しているが、古いものに脱出することを好みます。
- この試金は、4.1 に 4.8 の手順は上記で説明した、コントロールとして少なくとも 1 つの飛行応答を引き出す後に実行します。
- 一度マウス自主的避難所の葉、避難所を削除し、プラットフォームの反対側の端の新しい穴の位置を変更します。
- 新しい場所で避難所に入るまでに環境を探検するマウスを許可します。
- ときマウスは自ら嫌悪刺激と、現在避難所出てくる、その応答を観察します。
- 聴覚の刺激を使用して、この実験のより長い持続期間のための長期の脅威の下で、動物が実行他の場所に追加のエスケープ応答最初に避難所を見つけるに失敗した場合。
- プラットホームおよび避難所をきれいにし 4.10 と 4.11 の手順の説明に従って、ホーム ケージに戻します。
7. ' は避難所' 行動分析:
注: この試金の目的環境の避難所の不在が防衛行動の発現に与える影響を理解することです。
- 20 のすべての穴に差し込みます。この実験では無い避難所利用可能なアリーナで。
- 洗浄、乾燥後プラットフォーム (手順 4.1 と 4.2) 4.4 4.6 手順実行します。
- 7 分の馴化期間を許可します。
- 視覚刺激を提示し、防御応答を確認します。避難所の欠乏は、通常不変の視覚刺激の持続期間のための凍結挙動を推進しています。ゆっくり拡大のスポットを使用して (e.g。 発症時 2.6 ° の視角を subtends、11.2 °/s 以上 4 の直線的拡大サークル s 47.4 °、それは 1 のままにオフセットのする前に s) 凍結応答の観察を容易にします。
- マウスあたり 1 つ以上の応答が必要な場合は少なくとも 60 の刺激間間隔を使用して s います。
- 5 分して新たに導入された避難所のほとんどのマウスのための十分な時間となります後穴の 1 つの下で避難所を紹介必要な避難所の不在で回答数を取得、聞かせて、マウスが少なくとも 5 分の環境を探索、これが起こらない場合にこの期間を延長追加 5 分ブロックに少なくとも 1 つのエントリが確認されるまでは。
- 4.8 と 4.9 で、手順を繰り返し、エスケープ応答環境の避難所の存在下で実行を確認します。
- プラットホームおよび避難所をきれいにし 4.10 と 4.11 の手順の説明に従って、ホーム ケージに戻します。
8. データの解析:
メモ: 次のデータ解析手順の各実行できますない独立。
- 脱出の応答は、嫌悪刺激の発表急加速として容易に識別できます。刺激呈示と脱出のターゲットに向けられた頭部回転運動の先頭または加速度運動の始まりと時として脱出する待ち時間を定量的には、いずれか早い方。
- 応答の凍結は、呼吸運動25、永続的な少なくとも 0.5 秒7を除いて動物の合計不動によって特徴付けられます。嫌悪刺激のプレゼンテーションと不動期間の開始間の時間として凍結する待機時間を測定します。
- エスケープ応答ごとにマウスと避難所と、飛行中に実際の変位との間の距離の比率を計算することによって飛行経路の直線性を定量化します。
- エスケープ応答ごとに動物がへの飛行を指示した穴と避難所につながる穴の間の距離を測定することによって精度を計算します。ターゲットから外れている各穴が精度の 10% の減少を表す 20 穴なので (e.g、ターゲットを 2 つの穴は 80% の精度として表現できます)。
- 'ナビゲーション戦略' 行動分析プラットフォーム回転前に避難所の場所に対して相対的な応答の精度を定量化します。前回転精度と大幅に異なるではない平均の精度は、動物がエスケープ対象まで移動するために回転された感覚的手がかりのいずれかを使用していないことを示します。
- 「動的環境」の行動分析の新しいまたは古い避難所場所に向かってそれらのどちらも対象として各エスケープ応答を分類します。誘発的な防衛行動の反復に沿ってパターンが進化する方法を評価します。
- 避難所ない' 行動アッセイのため避難所の有無で嫌悪の視覚刺激の提示の後のマウスの速度を比較し、防御反応の開始に待ち時間を計算します。さらに、各状況での刺激に対する反応で凍結応答をトリガーの確率を計算します。
結果
聴覚や視覚刺激にさらされるマウスは、高速脱出応答刺激の発症と飛行の開始の間の短い待ち時間とを開始しました。視覚刺激からの脱出に平均待ち時間があった 202 ± 16 ms (n = 26 動物からの 51 の応答) と聴覚刺激のため大幅に長く: 510 ± 61 ms (n = 15 動物、 pから 36 レスポンス < 0.0001 t 検定の視覚と聴覚刺激;図 2 a)(ステップ 8.1)。脱出の応答は避難所に正確に指示された (視覚刺激のため精度の意味: 97.2 ± 1.4%、聴覚刺激、刺激、 pの 2 種類の有意差はないための 95.0 ± 1.4% = 0.1655 t テスト;図 2 b)(ステップ 8.4)、飛行軌道直線 (平均比 107.3 ± 1.3% と視覚刺激のため避難所聴覚刺激の 113.9 ± 1.5% までの距離までの距離に接近していたと図 2)(手順 8.3)。ホーミングの実行から刺激誘発行動を区別するために重要な刺激から短潜時を観察することは、飛行軌道の高直線性は、エスケープ応答いる避難所に到達し、単に離れの目標であることを示して刺激。
刺激呈示後センターのプラットフォームで、マウスが止まっている間迷路の外側の部分の回転 (範囲 = 36 °-90 °、平均 56 °) 正常にエスケープ応答 (手順 5) を誘発。すべてのマウスは、精度や回転する前に試験と比較すると飛行経路の直線性は低下しなかったと避難所の前の場所に向かって逃げた。96.3 であった元避難所の位置を参照して測定、平均精度回転前に、± 1.3% (n = 8 マウスからの 25 の応答) と回転後少しでも高い (100 ± 0%, p = 0.009 t テスト前と回転の記事)。元の避難場所に関連して平均の直線性は 109.4 ± 5.0% 事前回転 (8 マウスから 25 レスポンス) と後回転 109.1 ± 2.1% (n = 8 マウスからの 8 つの応答)、 p = 0.957 t テスト前と、図 3 a の後回転の間と B)。これらの結果を示す避難所 (手順 8.3 8.5) へのフライトをガイドする近位の視覚的な手掛かりは慣れていません。
マウス変更後まもなく新しい避難所場所を訪問につながった 1 つの巧妙な脱出の応答 (手順 6) 後の避難所の場所を変更する (新しい避難所を訪問する平均時間 = 33.1 s、範囲 4-82 s を =)。音刺激の後続のシーケンシャル試験生産 (一審で 44.4%)、新しい場所への脱出の確率の緩やかな増加 5 番目のトライアルでのすべての動物の間で 100% に達する (n = 9 動物、図 3)。これらの実験はプローブ (手順 8.6) 環境の変化に適応する避難場所メモリの更新の原動力です。
ない避難所 (ステップ 7) 迷路 7 分順化期間後 5 秒くらい視覚刺激の提示生産脱出ではなく凍結挙動 (凍結確率 = 95.2%、凍結時間平均 7.9 ± 2.7 s、n = 7 動物を =)。避難所同じセッションでの後続の導入と誘発される長い視覚刺激の提示の脱出応答確実にマウスが (図 3 D) 避難所 (の存在によって防御的な戦略を柔軟に切り替えることができますを示す8.1 と 8.7 ステップ)。

図 1: 行動のアリーナのスケマティック。(右) の上から、(左) 側からの閲覧行動のアリーナの主要コンポーネントの描画。避難所と接続されている視覚的な手がかりなど、プラットフォームの大部分を回転できます。くまトップ ビューでは、コンピューターを接続する避難所は (避難所は、例の場所は示される) はすべて同じ穴です。サウンド湿しキャビネットでアリーナ全体を囲みます。この図の拡大版を表示するのにはここをクリックしてください。
{kind=link}

図 2: 脱出の応答が迅速かつ正確な目標に向けられた行動。(A) 視覚や聴覚刺激の発症からエスケープ発症遅延。(B) の避難、避難所へのナビゲーションの精度測定値が 100%、避難所に直接マウスを実行する場合、10% の避難所から各ホールの少ない (e.g。 80% に達した穴は最初正しい 1 つから 2 つの穴をした場合、)。(C) 脱出中のマウスの変位は、フライトが線形に近いことを示す動物の初期位置とターゲット位置の間の距離に対してプロットされます。ボックス、ひげは 10-90 パーセン タイルからデータを表示し、残りのデータ ポイントが円として表示されます。赤い色のプロットは、聴覚の刺激からのデータ (n = 15 の動物から 36 の応答)、視覚的な刺激から黒は (n = 26 動物からの 51 の応答)。この図の拡大版を表示するのにはここをクリックしてください。
{kind=link}

図 3: マウス エスケープ応答を導くため近位の視覚的な手掛かりまたは避難所関連キューを使用しないでください。(前と後の回転プラットフォームの応答を図 2のように A) 変位プロット。(B) 前と後の回転状態での脱出の間のナビゲーションの精度。後の回転精度は、避難所の最初の位置への参照は、測定し、マウス新しい位置移動代わりに元の避難所の場所を示しています。(C) 刺激数に対してプロット新しい避難所場所に向けて脱出応答の割合です。刺激の 5th発表後すべての動物は、新しい避難所場所へ直接脱出 (n = 9 の動物)。(D) 避難所の利用 (赤) または不在 (青), 視覚刺激への応答で動物脱出を示し、それぞれの応答を凍結に速度を意味します。速度を基準に正規化されており、反応時間 (飛行年初または凍結応答、破線で定義) に配置されます。網掛けされた領域を示す SEM. (n = 7 動物)。2 a と 2 b、ボックスとひげの 10 90 パーセン タイルからデータを表示し、残りのデータ ポイントが円として表示されます。赤い色のプロットは、プラットフォームの回転前に聴覚の刺激からのデータ (n = 8 の動物からの 25 の応答) と青いプラットフォームを回転後の応答から (n = 8 の動物からの 8 つの応答)。この図の拡大版を表示するのにはここをクリックしてください。
{kind=link}
ディスカッション
ここで述べるアッセイを行うには、技術的に簡単だと回転実験プラットフォームを除いて標準的なバーンズ迷路の中で容易に実装することができます。それにもかかわらず、いくつかの合併症が生じることがあります: 一方、マウス可能性がありますが避難所のためできない十分に洗浄または乾燥したシェルターに入るは怖いようです。その一方で、非常に長時間避難所中マウスに滞在可能性があります。これらの実験は、動物が決して避難所から手動で削除と動物の苦痛と同様、パス統合を混乱させるし、脅威への対応を変更することができますが重要です。90 分後、実験を終了し、必要であれば 48 時間後の再検査をお勧めします。もう一つ関連する実用的な考察、ときにマウスは、プラットフォームの端を調査し、それが検出されないです視覚刺激場合その頭は、エッジ上角度し、こうしてお勧めしますこのような状況で刺激の源泉徴収します。また、まれにマウスはプラットフォーム オフでジャンプ ダウン可能性があります。実験の終了を提案し、48 h. 後に再テスト積極的にプラットフォームを一度離れるマウス、今後それを行う可能性が高いし、研究から除外する必要があります。最後に、我々 の経験からほとんどのマウスは、視覚刺激 (34/36 マウス) に対応いたします。ただし、マウスは、任意の種類の (驚愕、フライトまたは凍結応答) 視覚刺激への応答を表示しない場合、研究からは除外する必要があります。
考慮すべき重要なポイントは感覚的手がかりのコントロールが通常空間記憶アッセイで問題手がかりを汚染のすべての可能なソースを排除することは困難があることは、です。我々 の実験装置は、壁で迷路を囲むことによって外部の視覚的な手掛かりを低減し、遮音用サウンド湿しキャビネット内に置きます。嗅覚の手がかりを最小限に抑える、70% のエタノールまたは酢酸実験間の組み立てを徹底的にクリーニングをお勧めします。
私たちの行動のアッセイは、本能的な防衛行動を使って空間記憶をプローブし、子豚のシナリオに焦点を当てて空間ナビゲーション26を勉強する以前の方法に追加します。ここで説明する手順と標準の BM の試金の重要な違いは、トレーニング セッションの欠如です。私たちのアッセイで馴化期間はマウス訪問避難所は少なくとも 1 回としばしばより多くの時間、私達は前に避難所の場所2を記憶するのに十分なことをしているを確認します。我々 は高い成功率と訓練の欠乏にもかかわらず避難所を見つける精度の重要な理由は、実験中の動物を変位決して受動的パス統合になり、実行可能なナビゲーション戦略と考えています。我々 は、我々 の分析が扱うメモリを形成し、単一のセッション中に評価し、避難所の場所は、標準の BM の実験の目的は、通常の長期記憶のためテストしていない、しかし注意してください。最後に、セッションの間の離散的本質的刺激はなく、一般的に使用されるファンや話題を使用して、我々 の分析コントロールを提供します非常に良い実験さまざまなナビゲーション方法を使用して 2 つ以上の行動: 採餌と避難所向け脱出。記録の神経活動を操作する現代科学技術との組み合わせでこれらのアッセイの使用がどのように神経回路に重要な洞察を計算動作を提供できることと考えています。
開示事項
[結果] セクションに含まれるデータのほとんどは、ヴェイルet al 2017 で提示されたデータのサブセットです。
謝辞
この仕事 Wellcome の信頼/ロイヤル社会ヘンリー ・ デール交わり (098400/Z/12/Z) によって資金が供給された、医療研究評議会 (MRC) 三菱商事-アップ-1201/1、Wellcome の信頼、ギャツビーの慈善財団 SWC フェローシップ (結核) に MRC 思い立った (D.E. および付与 R.V)ベーリンガー インゲルハイム フォン博士フェローシップ (R.V) を。データ集録ソフトウェア、LMB 機械的および電気ワーク ショップ実験分野を構築するためのプログラミング、コスタス Betsios に感謝します
資料
| Name | Company | Catalog Number | Comments |
| Infrared iluminators TV6700 | Abus | - | |
| DLP projector Infocus IN3126 | Infocus | 0001740992-00000001 | |
| Ultrasound speaker Pettersson L60 | Pettersson Elektronik | - | |
| Amplifier QTX PRO240 | QTX | - | |
| Soundcard Xonar D2 | Asus | 90-YAA021-1UAN00Z | |
| HP Z840 desktop | HP | F5G73AV | |
| 100 micron drafting film | Xerox | 3R98145 | |
| Near infrared camera: Basler acA1300-60gmNIR | Basler | 106202 | |
| National Instruments BNC-2110 | National instruments | 777643-01 | |
| LabVIEW 2015 64-bit | National instruments | - | |
| Custom made Barnes maze | MRC Laboratory of Molecular Biology mechanical workshop | - |
参考文献
- Eaton, R. C., Bombardieri, R. A., Meyer, D. L. The Mauthner-initiated startle response in teleost fish. J Exp Biol. 66 (1), 65-81 (1977).
- Vale, R., Evans, D. A., Branco, T. Rapid Spatial Learning Controls Instinctive Defensive Behavior in Mice. Curr Biol. 27 (9), 1342-1349 (2017).
- Blanchard, R. J., Flannelly, K. J., Blanchard, D. C. Defensive behavior of laboratory and wild Rattus norvegicus. J Comp Psychol. 100 (2), 101-107 (1986).
- Dill, L. M., Houtman, R. The influence of distance to refuge on flight initiation distance in the gray squirrel (Sciurus carolinensis). Canadian Journal of Zoology. 67 (1), 233-235 (1989).
- Blanchard, R. J., Blanchard, D. C., Rodgers, J., Weiss, S. M. The characterization and modelling of antipredator defensive behavior. Neurosci Biobehav Rev. 14 (4), 463-472 (1990).
- Fanselow, M. S., Lester, L. S. A functional behavioristic approach to aversively motivated behavior: Predatory imminence as a determinant of the topography of defensive behavior. Evolution and learning. , (1988).
- De Franceschi, G., Vivattanasarn, T., Saleem, A. B., Solomon, S. G. Vision Guides Selection of Freeze or Flight Defense Strategies in Mice. Curr Biol. 26 (16), 2150-2154 (2016).
- Bräcker, L. B., et al. Essential role of the mushroom body in context-dependent CO 2 avoidance in Drosophila. Current Biology. 23 (13), 1228-1234 (2013).
- Ghosh, D. D., et al. Neural architecture of hunger-dependent multisensory decision making in C. elegans. Neuron. 92 (5), 1049-1062 (2016).
- Bellman, K. L., Krasne, F. B. Adaptive complexity of interactions between feeding and escape in crayfish. Science. 221 (4612), 779-781 (1983).
- Rodgers, W., Melzack, R., Segal, J. "Tail flip response" in goldfish. Journal of comparative and physiological psychology. 56 (5), 917(1963).
- Dill, L. M. The escape response of the zebra danio (Brachydanio rerio) II. The effect of experience. Animal Behaviour. 22 (3), 723-730 (1974).
- Barnes, C. A. Memory deficits associated with senescence: a neurophysiological and behavioral study in the rat. J Comp Physiol Psychol. 93 (1), 74-104 (1979).
- Pompl, P. N., Mullan, M. J., Bjugstad, K., Arendash, G. W. Adaptation of the circular platform spatial memory task for mice: use in detecting cognitive impairment in the APP(SW) transgenic mouse model for Alzheimer's disease. J Neurosci Methods. 87 (1), 87-95 (1999).
- Patil, S. S., Sunyer, B., Höger, H., Lubec, G. Evaluation of spatial memory of C57BL/6J and CD1 mice in the Barnes maze, the Multiple T-maze and in the Morris water maze. Behavioural Brain Research. 198 (1), 58-68 (2009).
- Sunyer, B., Patil, S., Höger, H., Lubec, G. Barnes maze, a useful task to assess spatial reference memory in the mice. Protocol Exchange. , (2007).
- Attar, A., et al. A shortened Barnes maze protocol reveals memory deficits at 4-months of age in the triple-transgenic mouse model of Alzheimer's disease. PLoS One. 8 (11), e80355(2013).
- Harrison, F. E., Reiserer, R. S., Tomarken, A. J., McDonald, M. P. Spatial and nonspatial escape strategies in the Barnes maze. Learn Mem. 13 (6), 809-819 (2006).
- Leary, T. P., Brown, R. E. The effects of apparatus design and test procedure on learning and memory performance of C57BL/6J mice on the Barnes maze. J Neurosci Methods. 203 (2), 315-324 (2012).
- Mittelstaedt, M. -L., Mittelstaedt, H. Homing by path integration in a mammal. Naturwissenschaften. 67 (11), 566-567 (1980).
- Stackman, R. W., Golob, E. J., Bassett, J. P., Taube, J. S. Passive transport disrupts directional path integration by rat head direction cells. J Neurophysiol. 90 (5), 2862-2874 (2003).
- Yilmaz, M., Meister, M. Rapid innate defensive responses of mice to looming visual stimuli. Curr Biol. 23 (20), 2011-2015 (2013).
- Mongeau, R., Miller, G. A., Chiang, E., Anderson, D. J. Neural correlates of competing fear behaviors evoked by an innately aversive stimulus. J Neurosci. 23 (9), 3855-3868 (2003).
- Hurst, J. L., West, R. S. Taming anxiety in laboratory mice. Nat Methods. 7 (10), 825-826 (2010).
- Paylor, R., Tracy, R., Wehner, J., Rudy, J. W. DBA/2 and C57BL/6 mice differ in contextual fear but not auditory fear conditioning. Behavioral neuroscience. 108 (4), 810(1994).
- Paul, C. M., Magda, G., Abel, S. Spatial memory: Theoretical basis and comparative review on experimental methods in rodents. Behav Brain Res. 203 (2), 151-164 (2009).
転載および許可
このJoVE論文のテキスト又は図を再利用するための許可を申請します
許可を申請さらに記事を探す
This article has been published
Video Coming Soon
Copyright © 2023 MyJoVE Corporation. All rights reserved