实时飞行控制:嵌入式传感器校准和数据采集
Overview
资料来源:Ella M. 阿特金斯,密歇根大学航空航天工程系,安阿伯,密歇根州
概述
自动驾驶仪允许使用从板载传感器收集的数据稳定飞机,这些数据测量飞机的方向、角速度和空速。这些数量可以通过自动驾驶仪进行调整,以便飞机自动按照从发射(起飞)到恢复(着陆)的飞行计划。收集类似的传感器数据来控制所有类型的飞机,从大型固定翼商用运输机到小型多旋翼直升机,如四轴飞行器,有四个推进器单元。
通过全球定位系统(GPS)等传感器捕获惯性位置和速度,自动驾驶仪实时飞行控制系统使多直升机或固定翼飞机能够稳定其姿态和空速,以遵循规定的轨迹。传感器集成、校准、数据采集和信号滤波是飞行控制实验的先决条件。
在这里,我们描述了一个传感器套件,它为飞行控制提供了必要的数据。介绍了两个不同嵌入式计算机平台上的信号接口和数据采集,并总结了传感器校准。单通道移动平均线和中值滤波器应用于每个数据通道,以减少高频信号噪声并消除异常值。
本实验演示了实时飞行控制的数据采集和传感器校准。几篇已发表的论文描述了传感器数据收集和控制的原则,它们最近侧重于小型无人驾驶飞行器(UAV)的传感器[1-3]。
Principles
飞机必须通过空气动力学和推进系统来平衡其力和力矩。如图1a所示,固定翼飞机在稳定飞行中平衡四种力:空气动力学提升、空气动力学阻力、推进系统推力和重量。固定翼飞机要么向上或向下俯仰,要么爬升或下降,然后向左或向右滚动,转向新的航向。
如图1b和1c所示,悬停多直升机必须平衡推进器单元产生的向上推力及其重量,而以明显速度飞行的多直升机则旋转,使其推力平衡空气动力学阻力。为了实现稳定的飞行,飞机还必须平衡所有三个轴的时刻。旋转使用以下三维 (3D) 飞行约定定义:
- 滚动 (+) = 绕向车辆前部(x)的轴旋转,导致侧向运动
- 俯仰 (+) = 绕轴旋转从左到右 (y),导致向前和向后倾斜运动
- Yaw (+) = 绕垂直轴 (z) 旋转,从而导致方向角度变化
飞行控制系统发出电机和控制表面命令,以稳定飞机滚动、俯仰、偏航姿态和平衡力,如图1所示。命令必须可靠实时更新,以确保飞机能够纠正风等干扰。为了实现并保持规定的姿态,控制系统必须保持对飞机姿态(滚动、俯仰、偏航)以及其姿态随时间变化(角速度)的准确估计。由于提升和拖动等力严重依赖于气流,因此需要额外的感应来确定与飞机有关的空气速度(图 1中的V)和气流方向。为了遵循规定的轨迹,飞机还必须通过传感器(如GPS)来感知其位置,如图2所示,飞机传感器支持飞行控制。
从传感器获取数据后,对信号进行过滤,以减少噪声和异常值对处理数据质量的影响。然后,数据被聚合到飞机状态的完整估计值中,包括 3D 位置、线性速度、方向(姿态)和角速度。飞机状态被发送到飞行控制器,然后飞行控制器更新命令到飞机推进器和/或控制表面的固定翼配置。
飞机传感器
飞机,包括固定翼和多直升机,依靠被称为惯性测量单元(IMU)的传感器套件来确定3D飞机姿态和角速度。IMU 通常由三种传感器类型组成:用于测量线性加速度的加速度计;速率陀螺仪(陀螺仪)测量角速度;和磁场传感器测量局部磁场的方向和强度。如图3所示,三轴 IMU 配置了三轴参考坐标系。共有九个传感元件,包括三个加速度计、三个速率陀螺仪和一个三轴磁力计,提供线性加速度(轴、ay和az)、角速度(+x、+y、×z)的独立测量。 和磁场 (mx、 my 和 mz)。IMU通常安装在飞机重心(CG)附近,传感器轴与飞机体轴对齐,如图3所示。
小型 IMU 传感器封装现在以低成本提供。每个传感器发出模拟电压,然后可在本地处理或直接发送到飞行计算机,如下所述。集成惯性导航系统 (INS) 将 IMU 与 GPS 接收器相结合。GPS 单元在内部将卫星信号转换为对地球惯性位置的估计,例如,在局部坐标框(如 NED(东北-向下)表示的飞机的纬度、经度、高度和 3D 线性速度。单靠IMU能够稳定飞机姿态;然而,使用INS,飞机可以跟踪规定的飞行轨迹。
由于空气动力学动力严重依赖空速,V,固定翼飞机需要测量气流,才能具有良好的飞行控制器性能。使用空气数据系统 (ADS) 收集流量测量值。在小型飞机中,通常只测量空速。在高性能飞机中,需要测量流量方向和速度。
图4显示了一个基本的平底系统[4],用于测量飞机的空速V。皮托管本身有一个中心孔,直接面对即将到来的流动。此孔通过中央管连接到差压传感器的一个端口。在皮托管外部间距相等的四个孔通过单个外围管连接到差速器传感器的另一个端口。中央管测量停滞或总压力PT,即流速为零处处的气压。外管测量静态气压 P S,它与自由流动空气速移动的流量(V) 相关。来自四个外围端口的组合压力平均为四个静态压力测量值,以考虑与皮托管的流量错位以及轻微的流量湍流。空速根据伯努利的方程计算,给定大气密度 =:
 (1)
(1)
然后,由皮托管系统测量的动态(差分)压力由:
 (2)
(2)
空速V,然后由:
 (3)
(3)
如图 5所示的五孔探头 [5] 提供了测量自由流流量角度和速度的能力。此探头是基线皮托静态系统的扩展,也测量中央管的PT。 中央总压力端口上方和/或下方以及中央总压力端口两侧的四个其他端口通常连接到绝对压力传感器。攻击角度,α,在水平飞行期间匹配螺距角度 *,由比较顶部和底部压力测量的函数计算:
 (4)
(4)
校准功能, 通过将五孔探头放入(小)风洞中,然后曲线拟合风洞压力数据,在最小和最大预期飞行之间的一系列已知攻击条件角度上进行调整。值=。同样,侧流(侧滑)角度*(通常较小)是从比较左右压力测量值的函数中计算的:
通过将五孔探头放入(小)风洞中,然后曲线拟合风洞压力数据,在最小和最大预期飞行之间的一系列已知攻击条件角度上进行调整。值=。同样,侧流(侧滑)角度*(通常较小)是从比较左右压力测量值的函数中计算的:
 (5)
(5)
同样,校准功能 由曲线拟合风洞压力数据确定,这些数据在α的最小和最大预期飞行值之间的一系列已知侧滑角度条件下收集。
由曲线拟合风洞压力数据确定,这些数据在α的最小和最大预期飞行值之间的一系列已知侧滑角度条件下收集。
IMU 和 ADS 使飞机能够感知其姿态、角度速度和空速(和潜在方向)。GPS 单元通常通过现成的 INS 或单独的仅 GPS 接口连接到飞行计算机,提供惯性位置和速度的测量。GPS 单元 [6] 聚合来自多颗卫星的到达时间数据,以通过三角剖分估计接收器的位置。基线 GPS 在开放区域的位置精度为 1-3 米;大多数无人机承载基线 GPS 单位。GPS 还可以从本地区域的信号源接收广域增强系统 (WAAS) 信号 [7],从而将位置估计误差降低到一米以下。GPS 位置以地球坐标系(通常为 LLA(纬度、经度、海拔)进行测量。GPS 还提供在 NED(东北-向下)或 ENU(东-北-上)基于地球的坐标系中,对飞机相对于地球的 3D 速度进行局部测量。GPS 单元在内部计算位置和速度信息,并将这些值传达给机上飞行计算机。
GPS 允许飞机遵循由地球固定坐标框架中的航点描述的飞行计划。许多任务,例如小型无人机监视,要求无人机根据当地环境进行导航。为此,无人机可能仍携带 GPS 接收器,但将依靠机载传感器(如摄像机、雷达或激光雷达)来导航当地环境。许多研究人员已经研究了无人机导航与本地环境使用板载传感器,如在搜索和救援的应用[8]和小型无人机定位在城市峡谷环境,GPS信号接收不可靠[9]。
数据采集 (DAQ) 和传感器校准
每个 IMU 和 ADS 传感器发出模拟电压,该电压通过模拟到数字 (A/D) 转换器,然后通过数字处理器或微处理器。A/D 转换可以直接在飞行计算机上执行,或者专用微处理器可以执行 A/D 转换并重新传输数据。由于信号在长信号线上丢失,因此在传感器信号源附近执行 A/D 转换是有利的。因此,许多现代国际监测系统嵌入微处理器,并通过(无损)串行连接传输数字化电压读数。例如,MPU-9250 在单个印刷电路板上承载 9 个 IMU 传感器(3 个加速度计、3 个速率陀螺仪、3 轴磁力计)和一个微处理器。然后,通过 I2C 串行连接 [10] 将收集的数据分发到飞行计算机。
在本演示中,我们将演示使用 IMU 与 I2C 连接,以及使用两个嵌入式计算平台直接收集飞行计算机上的模拟数据:钻石系统雅典娜 II 和 Beaglebone Blue。之所以选择它们,是因为它们具有不同的硬件接口功能。两者都是轻量级的,具有适合安装在小型无人机上的小尺寸。雅典娜II是一个成熟的产品;其强度在于高分辨率(16 位 A/D)数据分辨率,采用轻巧的 QNX Neutrino 实时操作系统,可确保高达 3 kHz 的可靠数据采集。运行Linux变体的Beaglebone Blue具有较低的分辨率A/D转换器,但它与包括I2C在内的各种串行设备接口。Beaglebone 成本低,处理器速度更快,并且与许多基于 Linux 的应用程序兼容。因此,它是低成本实验的一个更好的通用选择。雅典娜II用于本实验中,以证明其直接捕获传感器数据的效用,并应用于基于研究的飞行数据采集,例如在柔性机翼实验无人机平台[11]中。
在部署飞行控制之前,必须正确校准 IMU 和 ADS 传感器。当物理传感器输出通过 A/D 转换器传递到计算机,然后转换为 MKS(米千克秒)单位时,端到端校准考虑电压缩放和偏置:
 (6)
(6)
其中,以伏特 为单位的采集信号被偏置电压b 偏移,然后按 m 因子m缩放到 MKS 单元读数,。
为单位的采集信号被偏置电压b 偏移,然后按 m 因子m缩放到 MKS 单元读数,。  带串行接口的 MIM 可提供根据制造商的校准收集电压或 MKS 单元读数的选项。直接获取的 IMU 或 ADS 传感器数据需要从每个 A/D 通道(以计数表示)读取整数值,该值将转换为基于 A/D 转换器分辨率(例如 12 位或 16 位)和满量程电压范围的浮点电压读数。考虑到默认传感器校准和 A/D 转换过程中的不精确性,一旦完全集成到 DAQ 管道中,校准 IMU 和 ADS 通常比较有利。
带串行接口的 MIM 可提供根据制造商的校准收集电压或 MKS 单元读数的选项。直接获取的 IMU 或 ADS 传感器数据需要从每个 A/D 通道(以计数表示)读取整数值,该值将转换为基于 A/D 转换器分辨率(例如 12 位或 16 位)和满量程电压范围的浮点电压读数。考虑到默认传感器校准和 A/D 转换过程中的不精确性,一旦完全集成到 DAQ 管道中,校准 IMU 和 ADS 通常比较有利。
对于 IMU,加速度计电压相对于以米/秒平方为单位的零加速度缩放为读数,速率陀螺电压缩放至相对于每秒弧度为零角速度的读数。磁力计的校准需要更仔细的过程,以考虑局部干扰源[12]。在本实验中,我们演示了使用速率表校准速率陀螺仪和加速度计。请注意,在复杂环境中,尽管在校准方面尽了最大努力,但磁力计可能并不准确;在这些情况下,通过替代方法确定航向,例如考虑 GPS 速度矢量方向。
信号过滤
传感器信号不可避免地包含电气噪声以及来自物理源的噪声,例如飞行中的结构振动。此类噪声通常采取数据中单个异常值和高频噪声的形式;两者都可以通过低级信号滤波进行衰减。在我们的实验中应用了两个常用的传感器信号滤波器 [13]:用于衰减高频噪声的移动平均滤波器和用于抑制来自单通道顺序信号的信号异常值的中值滤波器,或来自图像中的"盐和胡椒"。简单移动平均线将当前信号估计为实时控制场景中最近获取的n个数据值的平均值;在后处理中,每个信号都从相同数量的前一个和未来的数据点进行估计,以避免时移效应。因此,可用于飞行控制的实时未加权移动平均估计值由以下提供:
 (7)
(7)
其中 是时间步长k-i处的单个传感器
是时间步长k-i处的单个传感器 数据值,是时间步长k的移动平均估计值。n的较大值可有效消除高频噪声,但具有在信号估计中引入时间延迟的缺点。它还可以过滤掉真实的瞬态信号。为了将旧数据对移动平均估计值的影响降至最低,数据通常呈线性或指数加权,以便最近的数据点对移动平均结果的影响大于旧数据值。
数据值,是时间步长k的移动平均估计值。n的较大值可有效消除高频噪声,但具有在信号估计中引入时间延迟的缺点。它还可以过滤掉真实的瞬态信号。为了将旧数据对移动平均估计值的影响降至最低,数据通常呈线性或指数加权,以便最近的数据点对移动平均结果的影响大于旧数据值。
单通道信号的中值滤波器非常简单。最后一个d原始数据值在数组或集中收集,然后返回中位数,即给定偶数值的两个中间值的中间值或平均值:
 (8)
(8)
其中 是单个传感器数据值,
是单个传感器数据值, 是时间步长k处的中值筛选输出。受高频噪声和异常值影响的数据通常通过中值和移动平均滤波器按顺序处理。为了防止异常值影响移动平均结果,通常首先应用中值滤波器。n和d的值由用户定义,但通常位于 [3, 10] 范围内,除非以比控制决策中使用的高得多的速率获取数据。
是时间步长k处的中值筛选输出。受高频噪声和异常值影响的数据通常通过中值和移动平均滤波器按顺序处理。为了防止异常值影响移动平均结果,通常首先应用中值滤波器。n和d的值由用户定义,但通常位于 [3, 10] 范围内,除非以比控制决策中使用的高得多的速率获取数据。
Procedure
此过程将说明 IMU 和 ADS 传感器校准和与飞行计算机的集成,并演示在室外飞行设施中使用集成的 INS 和 ADS 数据采集和处理。演示了在密歇根大学 M-Air 网状飞行测试设施中运行的四旋翼的端到端飞行控制。
1. 传感器校准:惯性测量单元 (IMU)
在高质量测试设备的支持下执行传感器校准时,效果最高。对于 3 轴 IMU,使用精度速率表(图 6 )分别校准每个轴的速率陀螺仪和加速度计。速率表以用户定义的角速度精确旋转。用户发出一系列速率命令,在此期间,IMU 会收集传感器校准所需的数据。因此,下面描述的单轴校准实验重复三次,每个 IMU 传感器轴(x、y、z) 重复一次。
- 将 IMU 安装在速率表上,以便正在校准的传感器轴向内或向外径向定向。
- 测量从表格中心到 IMU 中心的距离。这是圆周运动的参考半径。
- 将 DAQ 计算机、IMU 和电池直接安装到速率表中,并直接连接所有组件。
- 设置软件以收集 IMU 速率和加速数据。
- 虽然速率表是一动不动的,记录速率陀螺仪和加速度计的偏置值。
- 进行一系列具有不同正负恒定速率表旋转率的实验。传感器校准应为线性。以 0(基线)、±15、+30 和 +60 度/秒的速率获取数据。该表可以以更快的速率旋转,但所选值足以覆盖典型无人机飞行操作中预期的信号。
- 收集上面列出的每个角速度值的速率陀螺仪和加速度计的数据。在收集数据之前,应建立每个旋转速率,以确保保持恒定的速率。收集超过 10 - 15 s 的数据,假设数据收集速率至少为 30 - 100 Hz,以确保干扰可以从最终校准值中过滤出来。
- 断开 IMU 并将其从速率表上断开并定向,以便正在校准的加速度计将点向下。
- 通过计算机系统收集 +1g 的数据。
- 翻转 IMU,使正在校准的加速度计向上点,并通过计算机系统收集 -1g 数据。这些额外的数据点易于获取,可用于验证从 ±1g 速率表数据中获得的每个线性校准曲线。 1g 值对于精确校准尤为重要,因为线性加速度计数据用于确定相对于四轴飞行器主体的"向下"方向。
- 处理数据。为陀螺仪和加速度计数据点开发线性曲线拟合,将采集的电压与 MKS 单位旋转速率(陀螺仪)和线性加速度(加速度计)相关联。确认校准误差足够低。请注意,速率表提供陀螺仪校准的角速度的直接控制。相应的加速度,a,由圆周运动的向心力引起的,可以从速率表中心的指定角速度 +和 IMU 的半径r计算:
 (9)
(9)
2. 四旋翼飞行实验
对于我们的最后一系列实验,我们将IMU和pitot系统安装在四旋翼(如图7所示)上,并在密歇根大学的M-Air网状飞行设施中飞行。车辆通过 Ardupilot 开源自动驾驶仪套件的端口稳定到 Beaglebone Blue(不使用微处理器),并在飞行前通过任务规划器地面站软件进行配置。无线电控制发射器/接收器接口使飞行员能够为四旋翼高度、侧对侧运动以及前往 Ardupilot 的"内环"飞行控制规律提供"外环"命令,以调节四旋翼滚动角度、俯仰角、偏航角()。标题),和海拔。[14]
由于四旋翼不需要空速反馈来稳定,Ardupilot 仅依靠 IMU 数据加上高度压力传感器,该传感器在程序初始化期间相对于起飞高度压力进行校准,以稳定给定的飞行先导输入。Ardupilot 的完全自主扩展需要来自 GPS 或其他传感系统的惯性位置数据(例如,高速运动捕获)。由于我们的实验是在受限环境中用四旋翼进行的,因此不需要使用 pitot 空气数据系统。 然而,皮托特系统对于固定翼飞机和多直升机在不确定的大风环境下尝试精确的飞行路径至关重要。[15, 16]飞行测试程序分为三个阶段:飞行前、飞行测试和飞行后。这一细分类似于载人飞机飞行员通过使用完善的驾驶舱检查表所遵循的程序。[17]
飞行前
- 为电池充电,并在安装前对其进行测试。
- 建立一个明确的测试环境(室内或室外),并标记区域,以确保不参与的人保持清晰。
- 确保飞行测试团队经过简报并合格(经过培训)以执行计划测试。
- 如果飞往室外,请确保飞机和飞行员已根据 FAA 法规进行注册和认证。露天测试至少需要三个人:指挥飞行员 (PIC)、目视观察者 (VO) 和地面站操作员。在我们的测试中,四旋翼将在室外的网状设施中飞行。两个系绳操作员将确保车辆不能飞离进行室内测试。请注意,由于无人机不占用开放的室外空间,因此没有具体的 FAA 法规适用于网状飞行测试。
- 打开飞行电脑和地面站笔记本电脑。
- 收集初步数据以确保传感器正常工作。飞行员和支持团队必须确保清楚地了解飞行计划,并确保制定中止/恢复程序。
飞行测试
- 在地面站上开始数据采集。
- 确认飞行区域是否清晰/安全。
- 臂推进器/电机。
- 启动飞行测试序列。
- 进行飞行测试,飞行员会发出每个步骤,包括至少:
起飞(发射)、飞行模式变化、已知航点目标或机动以及着陆。 确保所有人员都在执行任务,并根据需要执行紧急程序(航班终止)。航点和轨迹特定于每个航班。对于四旋翼实验,我们遵循中等侵略性的交叉和矩形模式在恒定的高度和方向,其次是攀登/下降,然后一个偏航序列。此飞行中的角速率和线性加速度在数据中很容易识别,它们确认 IMU 和飞行控制器工作正常。
飞行后
- 解除电机的武装,以确保它们不会意外打开。
- 保存飞行数据并将其下载到存档存储。
- 根据飞行员、VO 和地面站操作员反馈,用文字记录飞行。
- 检查电池并根据需要充电。
- 回收设备,并为下一个乘员清洁区域。
Results
传感器校准
如图 8所示,显示了速率陀螺校准图的示例。在这种情况下,速率陀螺仪发出 2.38 V 的标称(零速)读数。如图所示,线性拟合提供了所有收集的数据点的非常近似值。
飞行测试结果
图 9显示了在室内环境中飞行的四旋翼的 30 s 横向加速度数据集的原始和筛选数据。滤波器值d和n相对较大,可以清楚地说明筛选过程的影响。如图所示,原始数据噪声衰减。但是,过滤的数据中存在明显的时间延迟,例如,在t=5 s 之前(衰减的)正加速度趋势中。 对于此图,在整体加速度趋势中注意到一个小的负偏差;这可能是由于IMU安装相对于四旋翼推进器平面的轻微间距,因此在x轴加速度测量中注意到一个小的重力加速度成分。 仅通过目视检查对齐传感器时,这种偏移很常见。

图 1.在飞机上行动的基本力量。请点击此处查看此图的较大版本。
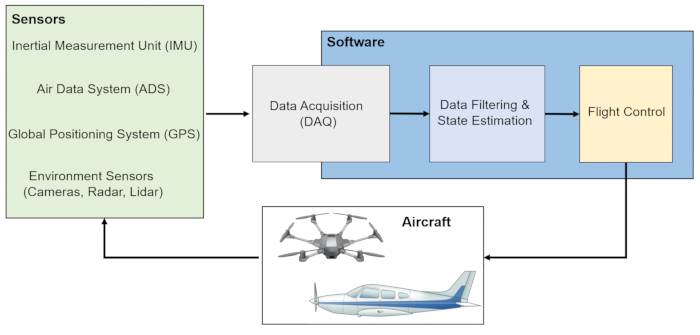
图 2.从传感器到飞行控制的数据管道。请点击此处查看此图的较大版本。
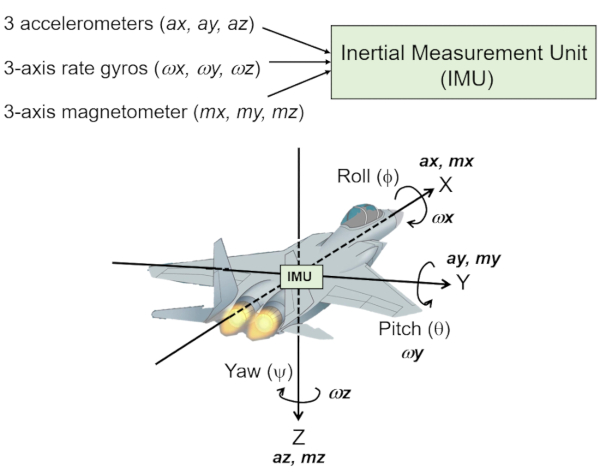
图3.惯性测量单元 (IMU) 传感器和轴约定。请点击此处查看此图的较大版本。

图 4.用于空速 (V) 测量的皮托管系统.请点击此处查看此图的较大版本。

图 5.五孔探头系统用于空速 (V)、攻击角度 (a) 和侧滑角度 (b) 测量.请点击此处查看此图的较大版本。

图 6. IMU 传感器校准与单轴速率表。 如图所示,z轴速率陀螺电压可针对每个命令角速度w直接校准,x轴加速度计可在角度速度w下从向心加速度校准并测量半径r从速率表的中心到 IMU 质心。 IMU 可以旋转和重新安装,以校准其他速率陀螺仪和加速度计轴的测量值。请点击此处查看此图的较大版本。
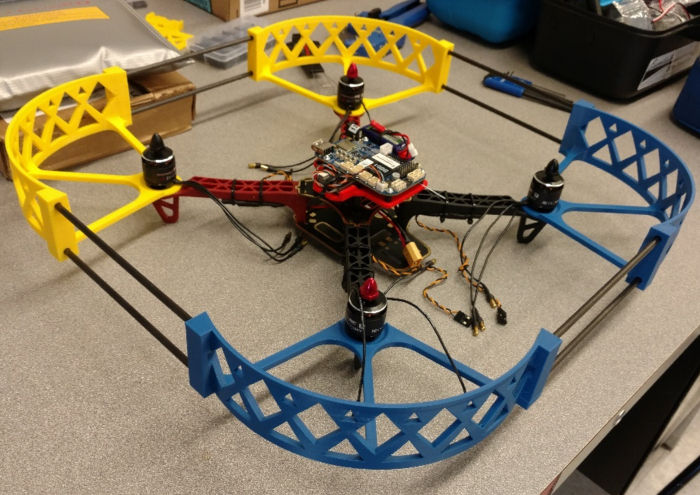
图 7.四旋翼平台与比格尔骨蓝色用于飞行测试。请点击此处查看此图的较大版本。

图8。 速率陀螺仪示例校准示例。请点击此处查看此图的较大版本。

图 9. 示例 四旋翼横向 (x) 加速度计数据摘录的室内飞行使用中位数滤波器与d+8 和移动平均滤波器窗口n=15。 原始数据由蓝色趋势指示,筛选后的数据以橙色显示。请点击此处查看此图的较大版本。

图10.例如固定翼小型 UAS GPS、加速度计和速率陀螺飞行测试数据。 提供原始(未过滤)数据以说明信号滤波的必要性。请点击此处查看此图的较大版本。
Application and Summary
在这里,我们描述了实现固定翼和旋转翼飞机实时飞行控制所需的传感器系统、数据采集和信号过滤过程。此数据管道是所有载人和无人驾驶飞机自动驾驶系统的基本要素。多直升机要求自动驾驶仪稳定下来,随着我们朝着越来越自主的飞机系统执行涉及机载数据的任务,所有类型的飞机都严重依赖实时数据采集和飞行控制。收集和有效负载传输。虽然可以集成现成的传感器封装,但可靠性对于了解不同环境中的传感器功能和限制至关重要。例如,强降水或冰会阻塞皮托管,城市峡谷结构可以阻挡 GPS 信号。
此外,异常态度可能需要扩展到依赖于 Euler Angle 态度表示的状态估计计算。通过集成额外传感器获得的弹性与支持冗余传感器所需的额外成本和重量之间存在内在权衡。成本最低的小型无人机可能会继续采用此处描述的飞行控制基准传感器套件。虽然最可靠的飞机,如商用运输机和战斗机,基于类似这里描述的传感器的状态估算,但它们依靠三重冗余和传感器多样性来确保飞机飞行控制器可以依靠准确的状态估计,尽管存在传感器故障或极富挑战性的环境条件。
图 10显示了从小型固定翼 UAS 飞行测试中获取的 GPS 和 (原始) IMU 时间历史记录示例。GPS 数据显示飞行员通过无线电控制链路手动飞行的本地游荡模式。原始的IMU时间历史记录显示信号,但也表现出大量的信号噪声。 这种噪音主要来自由推进单元(电机)引起的机身结构振动,是具有轻质木材或复合材料结构的固定翼小型 UAS 的典型现象。 请注意,数据是在用橡胶支座将 IMU 与结构隔离后收集的,为信号滤波提供了强大的动力。 在时间响应数据中,起飞(发射)发生在t=100 s 之后,而着陆在t=450 s 之前发生的大级数据"尖峰"中可见。
确认
我们感谢普拉申·夏尔马先生、马修·罗曼诺先生和密歇根大学彼得·加斯克尔博士协助建立和进行实验。
References
- Langelaan, J.W., Alley, N., and Neidhoefer, J., 2011. Wind field estimation for small unmanned aerial vehicles. Journal of Guidance, Control, and Dynamics, 34(4), pp.1016-1030.
- Hallberg, E., Kaminer, I., and Pascoal, A., 1999. Development of a flight test system for unmanned air vehicles. IEEE Control Systems, 19(1), pp.55-65.
- Kim, J.H., Sukkarieh, S., and Wishart, S., 2003. July. Real-time Navigation, Guidance, and Control of a UAV using Low-cost Sensors. In Field and Service Robotics, Springer, pp. 299-309.
- Gracey, W., 1956. Wind-tunnel investigation of a number of total-pressure tubes at high angles of attack-subsonic, transonic, and supersonic speeds (No. NACA-TN-3641). National Aeronautics and Space Administration (NASA) Langley Research Center, Hampton, VA. (http://www.dtic.mil/get-tr-doc/pdf?AD=ADA377664)
- Morrison, G.L., Schobeiri, M.T., and Pappu, K.R., 1998. Five-hole pressure probe analysis technique. Flow Measurement and Instrumentation, 9(3), pp.153-158.
- Farrell, J. and Barth, M., 1999. The global positioning system and inertial navigation. New York, NY, USA, McGraw-Hill.
- Enge, P., Walter, T., Pullen, S., Kee, C., Chao, Y.C., and Tsai, Y.J., 1996. Wide area augmentation of the global positioning system. Proceedings of the IEEE, 84(8), pp.1063-1088.
- Goodrich, M.A., Morse, B.S., Gerhardt, D., Cooper, J.L., Quigley, M., Adams, J.A., and Humphrey, C., 2008. Supporting wilderness search and rescue using a camera‐equipped mini UAV. Journal of Field Robotics, 25(1‐2), pp.89-110.
- Rufa, J.R., and Atkins, E.M., 2016. Unmanned aircraft system navigation in the urban environment: A systems analysis. Journal of Aerospace Information Systems, 13(4), pp.143-160.
- Paret, D. and Fenger, C., 1997. The I2C bus: from theory to practice. John Wiley & Sons, Inc.
- S. Cesnik, C.E., Senatore, P.J., Su, W., Atkins, E.M., and Shearer, C.M., 2012. X-HALE: A very flexible unmanned aerial vehicle for nonlinear aeroelastic tests. AIAA Journal, 50(12), pp.2820-2833.
- Vasconcelos, J.F., Elkaim, G., Silvestre, C., Oliveira, P., and Cardeira, B., 2011. Geometric approach to strapdown magnetometer calibration in sensor frame. IEEE Transactions on Aerospace and Electronic Systems, 47(2), pp.1293-1306.
- Bovik, A., Huang, T.S., and Munson, D., 1983. A generalization of median filtering using linear combinations of order statistics. IEEE Transactions on Acoustics, Speech, and Signal Processing, 31(6), pp.1342-1350.
- Beard, R.W. and McLain, T.W., 2012. Small unmanned aircraft: Theory and practice. Princeton University Press.
- Yeo, D., Shrestha, E., Paley, D.A., and Atkins, E.M., 2015. An empirical model of rotorcraft UAV downwash for disturbance localization and avoidance. In AIAA Atmospheric Flight Mechanics Conference, AIAA.
- Yeo, D., Sydney, N., and Paley, D.A., 2016. Onboard flow sensing for rotary-wing UAV pitch control in wind. In AIAA Guidance, Navigation, and Control Conference.
- Degani, A. and Wiener, E.L., 1993. Cockpit checklists: Concepts, design, and use. Human Factors, 35(2), pp.345-359.
- Yeo, D., Henderson, J., and Atkins, E., 2009, August. An aerodynamic data system for small hovering fixed-wing UAS. In AIAA Guidance, Navigation, and Control Conference.
Tags
跳至...
此集合中的视频:

Now Playing
实时飞行控制:嵌入式传感器校准和数据采集
Aeronautical Engineering
10.2K Views

模型飞机的空气动力学性能:DC-6B
Aeronautical Engineering
8.3K Views

推进器特性:音高、直径和叶片数在性能上的变化
Aeronautical Engineering
26.2K Views

机翼行为:克拉克Y-14翼上的压力分布
Aeronautical Engineering
21.0K Views

Clark Y-14 翼性能:高提升设备的部署(片和板条)
Aeronautical Engineering
13.3K Views

湍流球法:评估风洞流量质量
Aeronautical Engineering
8.7K Views

交叉圆柱流:测量压力分布和估计阻力系数
Aeronautical Engineering
16.1K Views

喷嘴分析:沿聚合和融合分流喷嘴的马赫数和压力的变化
Aeronautical Engineering
37.8K Views

施利伦成像:一种可视化超音速流特性的技术
Aeronautical Engineering
11.4K Views

水隧道中的流量可视化:在三角洲翼上观察前沿涡流
Aeronautical Engineering
8.0K Views

表面染料流可视化:观察超音速流中条纹模式的定性方法
Aeronautical Engineering
4.9K Views

皮托静态管:测量气流速度的设备
Aeronautical Engineering
48.7K Views

恒温测量:研究湍流边界层流的工具
Aeronautical Engineering
7.2K Views

压力传感器:使用皮托静态管进行校准
Aeronautical Engineering
8.5K Views

多直升机空气动力学:六轴飞行器上的特征推力
Aeronautical Engineering
9.1K Views
版权所属 © 2025 MyJoVE 公司版权所有,本公司不涉及任何医疗业务和医疗服务。