Contrôle de vol en temps réel : Étalonnage de capteurs embarqués et acquisition de données
Vue d'ensemble
Source: Ella M. Atkins, Département de génie aérospatial, Université du Michigan, Ann Arbor, MI
vue d'ensemble
Le pilote automatique permet de stabiliser les aéronefs à l'aide des données recueillies à partir de capteurs embarqués qui mesurent l'orientation, la vitesse angulaire et la vitesse de l'avion. Ces quantités peuvent être ajustées par le pilote automatique de sorte que l'avion suit automatiquement un plan de vol du lancement (décollage) jusqu'à la récupération (atterrissage). Des données similaires sur les capteurs sont recueillies pour contrôler tous les types d'aéronefs, des gros avions de transport commercial à voilure fixe aux hélicoptères à rotor multiple à petite échelle, comme le quadricoptère avec quatre propulseurs.
Avec la position inertielle et la vitesse capturées par un capteur tel que le système de positionnement global (GPS), le système de commande de vol en temps réel du pilote automatique permet à un avion multicopter ou à voilure fixe de stabiliser son assiette et sa vitesse de suivre un système prescrit trajectoire. L'intégration des capteurs, l'étalonnage, l'acquisition de données et le filtrage du signal sont des conditions préalables aux expériences de contrôle de vol.
Ici, nous décrivons une suite de capteurs qui fournit les données nécessaires pour le contrôle de vol. Les interfaces de signal et l'acquisition de données sur deux plates-formes informatiques intégrées différentes sont décrites, et l'étalonnage des capteurs est résumé. Des filtres moyens mobiles et médians à un seul canal sont appliqués à chaque canal de données afin de réduire le bruit du signal à haute fréquence et d'éliminer les valeurs aberrantes.
Dans cette expérience, l'acquisition de données et l'étalonnage des capteurs pour le contrôle de vol en temps réel sont démontrés. Plusieurs articles publiés ont décrit les principes de la collecte et du contrôle des données sur les capteurs, et ils se sont récemment concentrés sur les capteurs pour les petits véhicules aériens sans pilote (UAV) [1-3].
Principles
Les aéronefs doivent équilibrer leurs forces et leurs moments grâce à l'aérodynamique et aux systèmes de propulsion. Comme le montre la figure 1a, un aéronef à voilure fixe équilibre quatre forces en vol régulier : la portance aérodynamique, la traînée aérodynamique, la poussée du système de propulsion et le poids. Les aéronefs à voilure fixe se dirigent vers le haut ou vers le bas, pour monter ou descendre, et rouler vers la gauche ou vers la droite pour tourner vers un nouveau cap.
Comme le montrent les figures 1b et 1c, un multicopter planant doit équilibrer la poussée ascendante générée par les unités de propulseur avec son poids, tandis qu'un multicopter volant à une vitesse appréciable tourne de sorte que sa poussée équilibre la traînée aérodynamique. Pour assurer un vol stable, l'avion doit également équilibrer les moments sur les trois axes. Les rotations sont définies avec les conventions suivantes pour le vol en trois dimensions (3D) :
- Rouler (no) - rotation sur l'axe pointant vers l'avant du véhicule (x), résultant en mouvement d'un côté à l'autre
- Pitch () - rotation sur l'axe allant de gauche à droite (y), résultant en un mouvement d'inclinaison vers l'avant et vers l'arrière
- Yaw () - rotation sur l'axe vertical (z), ce qui entraîne un changement d'angle de cap
Un système de commande de vol émet des commandes de moteur et de surface de commande qui stabilisent le roulis, le tangage, l'assiette de lacet et les forces d'équilibre de l'avion, comme le montre la figure 1. Les commandes doivent être mises à jour de façon fiable et en temps réel pour s'assurer que l'avion peut corriger les perturbations telles que le vent. Pour atteindre et maintenir une assiette prescrite, le système de commande doit maintenir une estimation précise de l'assiette de l'avion (roulis, tangage, lacet) ainsi que de ses changements d'assiette au fil du temps (vitesses angulaires). Étant donné que les forces telles que la portance et la traînée dépendent de façon critique du débit d'air, une détection supplémentaire est nécessaire pour déterminer la vitesse(V à la figure 1) et la direction du débit d'air à l'égard de l'aéronef. Pour suivre une trajectoire prescrite, l'avion doit également sentir sa position à l'égard d'un capteur tel qu'un GPS, les capteurs d'aéronefs permettant la commande de vol sont indiqués à la figure 2.
Une fois les données acquises à partir de capteurs, les signaux sont filtrés pour réduire l'impact du bruit et des valeurs aberrantes sur la qualité des données traitées. Ensuite, les données sont regroupées en une estimation complète de l'état de l'aéronef, y compris les positions 3D, les vitesses linéaires, l'orientation (attitude) et les vitesses angulaires. L'état de l'avion est envoyé au contrôleur de vol, qui met ensuite à jour les commandes des propulseurs de l'avion et/ou des surfaces de commande pour les configurations à voilure fixe.
Capteurs d'aéronefs
Les aéronefs, y compris les aéronefs à voilure fixe et les multicopter, s'appuient sur une suite de capteurs connue sous le nom d'unité de mesure inertielle (IMU) pour déterminer l'assiette et la vitesse angulaire de l'avion en 3D. Un IMU se compose généralement de trois types de capteurs : les accéléromètres pour mesurer l'accélération linéaire; taux de gyroscopes (gyros) pour mesurer la vitesse angulaire; et des capteurs de champ magnétique pour mesurer la direction et la force du champ magnétique local. Un IMU à trois axes, illustré dans la figure 3,est configuré avec un système de coordonnées de référence à trois axes. Un total de neuf éléments de détection, y compris trois accéléromètres, trois gyros de taux, et un magnétomètre à trois axes, fournissent des mesures indépendantes de l'accélération linéaire(hache, ay, et az),vitesse angulaire (x, y, z), et le champ magnétique (mx, my, et mz). Un IMU est généralement monté près du centre de gravité de l'avion (CG), avec les axes du capteur alignés avec les axes de carrosserie de l'avion, comme le montre la figure 3.
Les petits paquets de capteurs IMU sont maintenant disponibles à faible coût. Chaque capteur émet une tension analogique, qui peut ensuite être traitée localement ou envoyée directement à un ordinateur de vol, comme décrit ci-dessous. Un système intégré de navigation inertielle (INS) combine un IMU avec un récepteur GPS. Les unités GPS traduisent en interne les signaux satellitaires en estimations de la position inertielle sur la Terre, par exemple, latitude, longitude, altitude et vitesse linéaire 3D de l'avion représenté dans un cadre de coordonnées locales comme NED (Nord-Est-Down). Un UMI seul est capable de stabiliser l'assiette de l'avion; toutefois, avec un INS, un aéronef peut suivre une trajectoire de vol prescrite.
Étant donné que les forces aérodynamiques dépendent fortement de la vitesse, V, les aéronefs à voilure fixe nécessitent des mesures du débit d'air pour de bonnes performances des contrôleurs de vol. Les mesures de débit sont collectées à l'aide d'un système de données atmosphériques (SDA). Dans les avions à petite échelle, souvent seule la vitesse est mesurée. Dans les aéronefs de haute performance, des mesures de la direction et de la vitesse du débit sont nécessaires.
Un système pitot-statique de base [4], qui est utilisé pour mesurer la vitesse de l'avion, V, est montré dans la figure 4. Le tube pitot lui-même a un trou central qui fait face directement dans le flux venant en sens inverse. Ce trou est relié par un tube central à un port d'un capteur de pression différentiel. Quatre trous également espacés autour de l'extérieur du tube pitot sont reliés par un seul tube périphérique à l'autre port du capteur différentiel. Le tube central mesure la stagnation ou la pression totale, PT, qui est la pression de l'air à un point où la vitesse d'écoulement est nulle. Le tube externe mesure la pression d'air statique, PS, qui est associée au flux se déplaçant à la vitesse libre, V. La pression combinée des quatre ports périphériques fait la moyenne des quatre mesures de pression statiques pour tenir compte du désalignement du débit avec le tube pitot ainsi que de la turbulence de débit mineure. La vitesse est calculée à partir de l'équation de Bernoulli étant donné la densité atmosphérique :
 (1)
(1)
La pression dynamique (différentielle) mesurée par un système de tube pitot est alors donnée par :
 (2)
(2)
Speed, V, est ensuite donné par:
 (3)
(3)
Une sonde à cinq trous [5], illustrée dans la figure 5,permet de mesurer l'angle et la vitesse du flux libre. Cette sonde, une extension du système pitot-statique de base, mesure également Le PT à partir d'un tube central. Quatre autres ports au-dessus et/ou en dessous et de chaque côté du port central de pression totale se connectent généralement aux capteurs de pression absolue. L'angle d'attaque, correspondant à l'angle de tangage pendant le vol en palier, est calculé à partir d'une fonction comparant les mesures de pression supérieure et inférieure :
 (4)
(4)
La fonction d'étalonnage,  est déterminée en plaçant la sonde à cinq trous dans une (petite) soufflerie, puis courbe raccordant les données de pression de la soufflerie sur une série de conditions d'angle d'attaque connus entre le vol minimum et maximum prévu valeurs pour '. De même, l'angle d'écoulement latéral (lasde), qui est généralement faible, est calculé à partir d'une fonction comparant les mesures de pression gauche et droite :
est déterminée en plaçant la sonde à cinq trous dans une (petite) soufflerie, puis courbe raccordant les données de pression de la soufflerie sur une série de conditions d'angle d'attaque connus entre le vol minimum et maximum prévu valeurs pour '. De même, l'angle d'écoulement latéral (lasde), qui est généralement faible, est calculé à partir d'une fonction comparant les mesures de pression gauche et droite :
 (5)
(5)
De même, la  fonction d'étalonnage est déterminée par les données de pression de la soufflerie de montage de courbe recueillies au cours d'une série de conditions d'angle latérale connues entre les valeurs de vol minimales et maximales attendues pour l'âgede ' .
fonction d'étalonnage est déterminée par les données de pression de la soufflerie de montage de courbe recueillies au cours d'une série de conditions d'angle latérale connues entre les valeurs de vol minimales et maximales attendues pour l'âgede ' .
L'UMI et l'ADS permettent à un aéronef de sentir son attitude, sa vitesse angulaire et sa vitesse (et potentiellement sa direction). Une unité GPS, généralement connectée soit par un INS disponible sur le marché, soit par une interface GPS séparée uniquement à un ordinateur de vol, fournit des mesures de la position inertielle et de la vitesse. Une unité GPS [6] regroupe les données sur l'heure d'arrivée de plusieurs satellites pour estimer la position du récepteur à partir de la triangulation. GPS de base a une précision de position de l'ordre de 1-3 mètres dans les zones ouvertes; la plupart des UAV hébergent des unités GPS de base. Le GPS peut également recevoir des signaux du Système d'augmentation de zone large (WAAS) [7] d'une source de signal dans une région locale qui réduisent les erreurs d'estimation de position à moins d'un mètre. Les positions GPS sont mesurées dans le système de coordonnées de la Terre, généralement LLA (Latitude, Longitude, Altitude). Le GPS fournit également une mesure locale de la vitesse 3D d'un aéronef par rapport à la Terre dans les systèmes de coordonnées terrestres NED (Nord-Est-Down) ou ENU (Est-Nord-Up). Les unités GPS calculent en interne les informations de position et de vitesse et communiquent ces valeurs à un ordinateur de vol à bord.
Le GPS permet à un aéronef de suivre un plan de vol décrit par des points de passage dans un cadre de coordonnées fixes sur Terre. De nombreuses missions, par exemple la surveillance des petits drones, exigent que le Drone navigue en ce qui concerne un environnement local. À cette fin, l'UAV peut toujours transporter un récepteur GPS, mais s'appuiera sur des capteurs embarqués tels que des caméras, radar, ou Lidar, pour naviguer en ce qui concerne un environnement local. De nombreux chercheurs ont étudié la navigation des drones à l'aide de capteurs embarqués, comme dans les applications de recherche et sauvetage [8] et pour la localisation des petits drones dans un environnement urbain de canyon où la réception du signal GPS n'est pas fiable [9].
Acquisition de données (DAQ) et Calibration des capteurs
Chaque capteur IMU et ADS émet une tension analogique qui passe par un convertisseur Analogique-numérique (A/D) puis un processeur numérique ou un microprocesseur. La conversion A/D peut être effectuée directement sur l'ordinateur de vol, ou un microprocesseur dédié peut effectuer la conversion A/D et retransmettre des données. Étant donné que le signal est perdu sur de longs fils de signal, il est avantageux d'effectuer la conversion A/D près de la source du signal du capteur. Par conséquent, de nombreuses IMU modernes intègrent un microprocesseur et transmettent des lectures de tension numérisées par le biais d'une connexion série (sans perte). Par exemple, le MPU-9250 abrite les neuf capteurs IMU (3 accéléromètres, 3 gyros à 3 vitesses, magnétomètre à 3 axes) et un microprocesseur sur un seul circuit imprimé. Les données collectées sont ensuite distribuées à l'ordinateur de vol au cours d'une connexion série I2C [10].
Dans cette démonstration, nous illustrons l'utilisation d'un IMU avec connexion I2C et la collecte directe de données analogiques sur l'ordinateur de vol à l'aide de deux plates-formes informatiques intégrées : une Diamond Systems Athena II et une Beaglebone Blue. Ils ont été sélectionnés en raison de leurs diverses capacités d'interface matérielle. Les deux sont légers et ont un petit facteur de forme approprié pour l'installation sur un petit drone. L'Athéna II est un produit bien établi; sa force est dans la résolution de données haute résolution (16 bits A/D), qui, avec le système d'exploitation léger QNX Neutrino en temps réel, assure l'acquisition de données fiables jusqu'à 3 kHz. Le Beaglebone Blue, exécutant une variante de Linux, a un convertisseur A/D de faible résolution, mais il s'interface à une variété d'appareils de série, y compris I2C. Le Beaglebone est à faible coût, dispose d'un processeur plus rapide, et est compatible avec de nombreuses applications basées sur Linux. Il s'agit donc d'un meilleur choix général pour les expériences à faible coût. L'Athena II est utilisé dans cette expérience pour démontrer son utilité dans la capture directe des données des capteurs avec application à l'acquisition de données de vol basées sur la recherche, comme dans une plate-forme expérimentale flexible d'UAV d'aile [11].
Avant le déploiement pour la commande de vol, les capteurs IMU et ADS doivent être correctement calibrés. L'étalonnage de bout en bout tient compte de la mise à l'échelle de la tension et du biais lorsque la sortie du capteur physique passe à travers le convertisseur A/D vers l'ordinateur, puis est traduite en unités MKS (mètre-kilogramme-seconde) :
 (6)
(6)
lorsque le signal  acquis, en volts, est compensé par une tension de biais, b, et
acquis, en volts, est compensé par une tension de biais, b, et  est ensuite mis à l'échelle par facteur m à une lecture d'unité MKS, . ImUs avec une interface série peut fournir des options pour recueillir des lectures dans les volts ou les unités MKS en fonction de l'étalonnage du fabricant. Les données de capteur directement acquises pour l'IMU ou l'ADS nécessitent la lecture d'une valeur d'entrée de chaque canal A/D (en nombre), qui se traduit par une lecture de tension à point flottant basée sur la résolution du convertisseur A/D (p. ex. 12 bits ou 16 bits) et la plage de tension à grande échelle. Pour tenir compte des imprécisions dans les étalonnages par défaut des capteurs et dans le processus de conversion A/D, il est généralement avantageux de calibrer l'IMU et l'ADS une fois entièrement intégrés dans le pipeline DAQ.
est ensuite mis à l'échelle par facteur m à une lecture d'unité MKS, . ImUs avec une interface série peut fournir des options pour recueillir des lectures dans les volts ou les unités MKS en fonction de l'étalonnage du fabricant. Les données de capteur directement acquises pour l'IMU ou l'ADS nécessitent la lecture d'une valeur d'entrée de chaque canal A/D (en nombre), qui se traduit par une lecture de tension à point flottant basée sur la résolution du convertisseur A/D (p. ex. 12 bits ou 16 bits) et la plage de tension à grande échelle. Pour tenir compte des imprécisions dans les étalonnages par défaut des capteurs et dans le processus de conversion A/D, il est généralement avantageux de calibrer l'IMU et l'ADS une fois entièrement intégrés dans le pipeline DAQ.
Pour l'UMI, les tensions d'accéléromètre sont à une lecture par rapport à l'accélération zéro dans les mètres par seconde carrée, et les tensions de gyro-taux sont échelles à une lecture relative à la vitesse angulaire zéro dans les radians par seconde. L'étalonnage d'un magnétomètre nécessite un processus plus prudent qui tient compte des sources de perturbation locales [12]. Dans cette expérience, nous illustrons l'utilisation d'un tableau de taux pour calibrer les gyros et les accéléromètres. Notez que dans les environnements complexes, un magnétomètre peut ne pas être précis malgré les meilleurs efforts d'étalonnage; dans ces cas, le cap est déterminé par d'autres moyens, par exemple, la prise en compte du cap vectoriel de vitesse GPS.
Filtrage des signaux
Les signaux du capteur contiennent inévitablement du bruit électrique ainsi que du bruit provenant de sources physiques, comme les vibrations structurelles en vol. Ce bruit prend généralement la forme d'aberrations uniques dans les données et le bruit à haute fréquence; les deux peuvent être atténués par un filtrage de signal de bas niveau. Deux filtres de signal de capteur couramment appliqués [13] sont appliqués dans nos expériences : un filtre moyen mobile pour atténuer le bruit à haute fréquence et un filtre médian pour rejeter les valeurs aberrantes de signal des signaux séquentiels à un seul canal, ou « sel et poivre », des images. La moyenne mobile simple estime le signal actuel comme la valeur moyenne des valeurs de données n les plus récemment acquises dans un scénario de contrôle en temps réel; en post-traitement, chaque signal est estimé à partir d'un nombre égal de points de données antérieurs et futurs afin d'éviter les effets de décalage temporel. L'estimation mobile non pondérée en temps réel utilisable pour le contrôle de vol est donc donnée par :
 (7)
(7)
 où est une valeur de données de
où est une valeur de données de  capteur unique au moment étape k-i et est l'estimation moyenne en mouvement pour l'étape de temps k. Une grande valeur pour n élimine efficacement le bruit à haute fréquence, mais a les inconvénients d'introduire un délai dans les estimations du signal. Il peut également filtrer les signaux réels et transitoires. Afin de minimiser l'impact des anciennes données sur les estimations moyennes mobiles, les données sont souvent pondérées de façon linéaire ou exponentielle de sorte que les points de données les plus récents influencent les résultats moyens mobiles plus que les valeurs de données plus anciennes.
capteur unique au moment étape k-i et est l'estimation moyenne en mouvement pour l'étape de temps k. Une grande valeur pour n élimine efficacement le bruit à haute fréquence, mais a les inconvénients d'introduire un délai dans les estimations du signal. Il peut également filtrer les signaux réels et transitoires. Afin de minimiser l'impact des anciennes données sur les estimations moyennes mobiles, les données sont souvent pondérées de façon linéaire ou exponentielle de sorte que les points de données les plus récents influencent les résultats moyens mobiles plus que les valeurs de données plus anciennes.
Le filtre médian pour les signaux à un seul canal est simple. Les dernières valeurs brutes de données sont collectées dans un tableau ou un ensemble, puis la médiane, c'est-à-d., la valeur moyenne ou la moyenne des deux valeurs moyennes compte tenu d'un nombre pair de valeurs, est retournée :
 (8)
(8)
où  est une valeur
est une valeur  de données de capteur unique et est la sortie filtrée médiane à l'étape de temps k. Les données soumises à des bruits à haute fréquence et à des valeurs aberrantes sont souvent traitées de façon séquentielle par des filtres médians et moyens mobiles. Pour empêcher les valeurs aberrantes d'influencer le résultat moyen mobile, le filtre médian est généralement appliqué en premier. Les valeurs pour n et d sont définies par l'utilisateur, mais sont généralement de l'ordre [3, 10] à moins que les données ne soient acquises à des taux beaucoup plus élevés qu'elles ne sont utilisées dans les décisions de contrôle.
de données de capteur unique et est la sortie filtrée médiane à l'étape de temps k. Les données soumises à des bruits à haute fréquence et à des valeurs aberrantes sont souvent traitées de façon séquentielle par des filtres médians et moyens mobiles. Pour empêcher les valeurs aberrantes d'influencer le résultat moyen mobile, le filtre médian est généralement appliqué en premier. Les valeurs pour n et d sont définies par l'utilisateur, mais sont généralement de l'ordre [3, 10] à moins que les données ne soient acquises à des taux beaucoup plus élevés qu'elles ne sont utilisées dans les décisions de contrôle.
Procédure
Cette procédure illustrera l'étalonnage et l'intégration des capteurs IMU et ADS avec les ordinateurs de vol et démontrera l'utilisation de l'acquisition et du traitement intégrés des données INS et ADS dans une installation de vol en plein air. La commande de vol de bout en bout d'un quadrotor opérant dans l'installation d'essais en vol m-air de l'Université du Michigan est démontrée.
1. Calibrage du capteur : Unité de mesure inertielle (IMU)
L'étalonnage des capteurs est plus efficace lorsqu'il est effectué avec le soutien d'un équipement d'essai de haute qualité. Pour l'IMU à 3 axes, étalonner le gyromètre à taux et l'accéléromètre pour chaque axe séparément à l'aide d'un tableau de taux de précision (Figure 6). Le tableau de taux tourne précisément à une vitesse angulaire définie par l'utilisateur. L'utilisateur émet une série de commandes tarifaires, au cours desquelles l'UMI recueille les données nécessaires à l'étalonnage des capteurs. L'expérience d'étalonnage à axe unique décrite ci-dessous est donc répétée trois fois, une fois pour chaque axe de capteur IMU (x, y, z).
- Montez l'IMU sur la table de vitesse de sorte que l'axe du capteur en cours d'étalonnage est dirigé radialement vers l'intérieur ou vers l'extérieur.
- Mesurez la distance entre le centre de la table et le centre de l'UMI. C'est le rayon de référence pour le mouvement circulaire.
- Montez l'ordinateur DAQ, l'IMU et la batterie directement à la table tarifaire, et connectez tous les composants directement.
- Configurez un logiciel pour collecter des données de taux et d'accélération iMU.
- Tandis que le tableau de taux est immobile, le gyro de taux d'enregistrement, et les valeurs de biais d'accéléromètre.
- Mener une série d'expériences avec différents taux de rotation des tables à taux constants positifs et négatifs. On s'attend à ce que les étalonnages des capteurs soient linéaires. Acquérir des données à des taux de 0 (ligne de base), de 15, 30 et de 60 degrés/seconde. La table peut tourner à des vitesses plus rapides, mais les valeurs sélectionnées sont suffisantes pour couvrir les signaux attendus dans les opérations de vol typiques des uAV.
- Recueillir les données du gyromètre à taux et de l'accéléromètre calibré pour chaque valeur de vitesse angulaire énumérée ci-dessus. Chaque taux de rotation doit être établi avant que les données ne soient recueillies afin de s'assurer qu'un taux constant est maintenu. Recueillir des données sur 10 - 15 s, en supposant un taux de collecte de données d'au moins 30 - 100 Hz, pour s'assurer que les perturbations peuvent être filtrées à partir des valeurs d'étalonnage final.
- Déconnectez et retirez l'IMU du tableau tarifaire et orientez-le de telle sorte que l'accéléromètre calibré indique vers le bas.
- Recueillir des données de 1 g par l'intermédiaire du système informatique.
- Retournez l'IMU de telle sorte que l'accéléromètre en cours de calibré points et de recueillir des données -1g à travers le système informatique. Ces points de données supplémentaires sont simples à obtenir et peuvent être utilisés pour valider chaque courbe d'étalonnage linéaire obtenue à partir de données de table de taux à 1g. La valeur de 1 g est particulièrement importante pour calibrer avec précision parce que les données linéaires d'accéléromètre sont employées pour déterminer la direction « vers le bas » par rapport au corps de quadcopter.
- Traiter les données. Développer des ajustements linéaires de courbe pour les points de données de gyro et d'accéléromètre, qui reliedes les tensions acquises aux taux de rotation unitairede de MKS (gyro) et aux accélérations linéaires (accéléromètre). Confirmez que l'erreur d'étalonnage est suffisamment faible. Notez que le tableau de taux fournit un contrôle direct de la vitesse angulaire pour l'étalonnage gyrosco-gyro. L'accélération correspondante, a, induite par la force centripète du mouvement circulaire, peut être calculer à partir de la vitesse angulaire spécifiée et le rayon r de l'IMU à partir du centre de table de taux:
 (9)
(9)
2. Expériences de vol Quadrotor
Pour notre dernière série d'expériences, nous montons le système IMU et pitot sur un quadrotor (montré dans la figure 7) et volons dans l'installation de vol M-Air de l'Université du Michigan. Le véhicule est stabilisé par un port du paquet de pilote automatique open source Ardupilot jusqu'au Beaglebone Blue (aucun microprocesseur utilisé) et configuré avant le vol par le logiciel de station au sol Mission Planner. Une interface émetteur/récepteur de commande radio permet au pilote de fournir des commandes de « boucle extérieure » pour l'altitude du quadrotor, le mouvement d'un côté à l'autre et la loi sur les commandes de vol « boucle intérieure » d'Ardupilot réglant l'angle de roulis du quadrotor, l'angle de tangage, l'angle de lacet ( en tête), et l'altitude. [14]
Étant donné qu'un quadrotor n'a pas besoin de rétroaction de la vitesse pour se stabiliser, Ardupilot ne s'appuie que sur les données de l'IMU ainsi que sur un capteur de pression pour l'altitude, qui est calibré pendant l'initialisation du programme par rapport à la pression d'altitude au décollage, pour stabiliser le vol donné les entrées pilotes. Une extension entièrement autonome d'Ardupilot nécessite des données de position inertielle à partir du GPS ou d'un autre système de détection (p. ex., capture de mouvement à grande vitesse). Étant donné que nos expériences ont été réalisées avec des quadrotors dans des environnements contraints, le système de données atmosphériques pitot n'est pas nécessaire. Cependant, les systèmes pitot sont essentiels pour les aéronefs à voilure fixe et les multicopters qui tentent des trajectoires de vol précises suivant des environnements venteux incertains. [15, 16] La procédure d'essai en vol est divisée en trois phases : avant le vol, l'essai en vol et après le vol. Cette subdivision est semblable aux procédures suivies par les pilotes d'aéronefs habités grâce à l'utilisation de listes de vérifications bien établies dans le poste de pilotage. [17]
Pré-vol
- Chargez les piles et testez-les avant l'installation.
- Établissez un environnement d'essai clair (intérieur ou extérieur) et marquez la zone pour s'assurer que les personnes non impliquées restent claires.
- Assurez-vous que l'équipe d'essais en vol est informée et qualifiée (formée) pour effectuer le test prévu.
- Si vous volez à l'extérieur, assurez-vous que l'aéronef et le pilote sont immatriculés et certifiés selon les règlements de la FAA. Un minimum de trois personnes est requis pour un essai en plein air : un pilote commandant de bord (PIC), un observateur visuel (VO) et un opérateur de station au sol. Pour nos essais, le quadrotor volera dans une installation nette à l'extérieur. Deux opérateurs d'attache assureront que le véhicule ne peut pas s'envoler pour des essais à l'intérieur. Notez qu'aucun règlement spécifique de la FAA ne s'applique aux essais en vol filetés puisque l'UAV n'occupe pas un espace extérieur ouvert.
- Allumez l'ordinateur de vol et l'ordinateur portable de station au sol.
- Recueillir des données préliminaires pour s'assurer que les capteurs fonctionnent correctement. Le pilote et l'équipe de soutien doivent s'assurer d'une compréhension claire du plan de vol et de la mettre en place des procédures d'interruption et de récupération.
Essai en vol
- Démarrer l'acquisition de données sur la station au sol.
- Confirmer que la zone de vol est claire/sûre.
- Propulseurs/moteurs de bras.
- Démarrer la séquence d'essais en vol.
- Effectuer l'essai en vol, le pilote appelant chaque étape, y compris au minimum :
décollage (lancement), changements de mode de vol, cibles ou manœuvres connues, et atterrissage. Assurez-vous que tout le personnel est sur la tâche et exécutez les procédures d'urgence (arrêt de vol) au besoin. Les points de passage et les trajectoires sont spécifiques à chaque vol. Pour l'expérience quadrotor, nous suivons des motifs de croisement et rectangulairemodérés modérément agressifs à une altitude et un cap constants, suivis d'une montée/descente puis d'une séquence de lacet. Les taux angulaires et les accélérations linéaires dans ce vol sont facilement identifiés dans les données, et ils confirment que l'IMU et le contrôleur de vol fonctionnent correctement.
Après le vol
- Désarmer les moteurs pour s'assurer qu'ils ne s'allument pas accidentellement.
- Enregistrer et télécharger les données de vol dans le stockage d'archives.
- Enregistrez le vol en mots par le pilote, la VO et les commentaires des exploitants de stations au sol.
- Vérifiez les piles et chargez au besoin.
- Récupérer l'équipement et nettoyer la zone pour le prochain occupant.
Résultats
Calibrage du capteur
Un exemple de parcelle d'étalonnage gyroscographique de taux est montré dans la figure 8. Dans ce cas, le gyro graphique émet une lecture nominale (à vitesse zéro) de 2,38 V. Les données de tension gyrographique de taux ont été recueillies pour six vitesses de rotation différentes mesurées en degrés par seconde, et une courbe linéaire était adaptée à ces données. Comme indiqué, l'ajustement linéaire fournit une très bonne approximation de tous les points de données collectés.
Résultats des essais en vol
Les figures 9 montrent les données brutes et filtrées d'un jeu de données d'accélération latérale de 30 s pour un quadrotor volant dans un environnement intérieur. Les valeurs de filtre d et n sont relativement grandes pour illustrer clairement l'impact du processus de filtrage. Comme indiqué, le bruit des données brutes est atténué. Cependant, un délai notable est présent dans les données filtrées, par exemple, dans la tendance d'accélération positive (atténuée) juste avant t'5 s. Pour cette parcelle, un petit biais négatif est noté dans la tendance globale d'accélération ; cela est probablement dû à un léger pas dans la monture IMU par rapport au plan de propulseur quadrotor de telle sorte qu'un petit composant de l'accélération gravitationnelle est noté dans la mesure d'accélération x-axe. Une telle compensation est courante lors de l'alignement des capteurs uniquement par l'inspection visuelle.

Figure 1. Forces fondamentales agissant à bord d'aéronefs. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
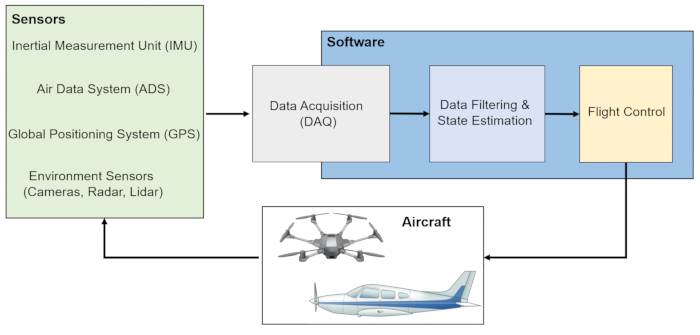
Figure 2. Pipeline de données des capteurs à la commande de vol. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
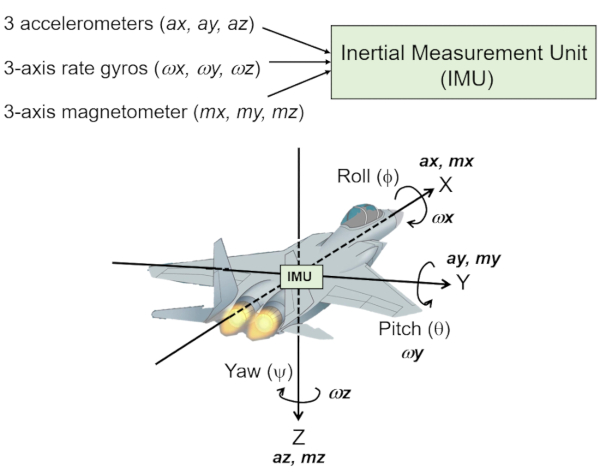
Figure 3. Capteurs et conventions de l'Axe de l'Unité de Mesure Inertielle (IMU). Veuillez cliquer ici pour voir une version plus grande de ce chiffre.

Figure 4. Système de tube pitot pour la vitesse (V) Mesure. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.

Figure 5. Five-Hole Probe System for Airspeed (V), Angle of Attack (a), et Sideslip Angle (b) Mesure. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.

Figure 6. Calibration du capteur IMU avec une table de taux d'axe unique. Comme indiqué, la tension gyro-vitesse de l'axe zpeut être calibrée directement pour chaque vitesse angulaire commandée, w, et l'accéléromètre x-axepeut être calibré à partir de l'accélération centripète étant donné la vitesse angulaire w et mesurée rayon r du centre de la table tarifaire au centroïde de l'IMU. L'UmIM peut être tourné et remonté pour calibrer les mesures des autres axes de gyroetet et d'accéléromètre. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
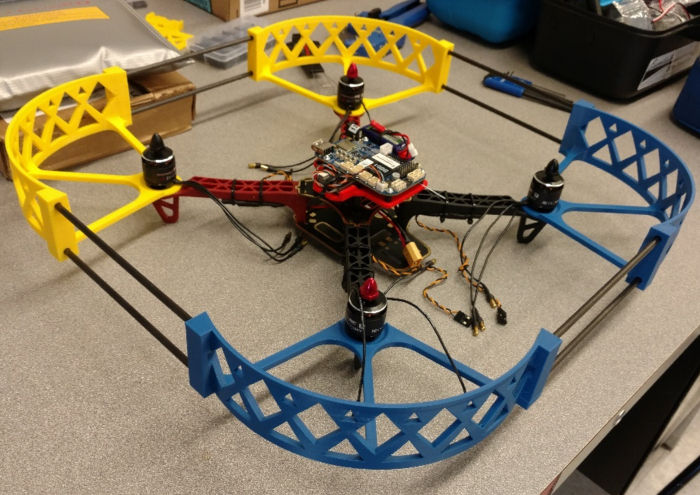
Figure 7. Plate-forme Quadrotor avec Beaglebone Blue utilisé pour les essais en vol. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.

Figure 8. Noter Gyro Exemple Calibration Exemple. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.

Figure 9. Exemple Quadrotor Lateral (x) Accelerometer Data Extrait pour un vol intérieur à l'aide d'un filtre médian avec d8 et filtre moyen mobile avec fenêtre n15. Les données brutes sont indiquées par la tendance bleue, et les données filtrées sont affichées en orange. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.

Figure 10. Exemple de petits GPS UAS à voilure fixe, d'accéléromètre et de données d'essais en vol Gyro. Des données brutes (non filtrées) sont présentées pour illustrer la nécessité d'un filtrage du signal. Veuillez cliquer ici pour voir une version plus grande de ce chiffre.
Applications et Résumé
Nous avons décrit ici les systèmes de capteurs, l'acquisition de données et le processus de filtrage des signaux requis pour permettre aux aéronefs à voilure fixe et à voilure tournante de contrôler en temps réel les aéronefs en temps réel. Ce pipeline de données est un élément essentiel de tous les systèmes de pilote automatique d'aéronefs habités et sans pilote. Les multicoptères exigent que les pilotes automatiques se stabilisent, et les aéronefs de tous types s'appuient de façon critique sur l'acquisition de données en temps réel et le contrôle de vol pour toutes les opérations alors que nous nous dirigeons vers des systèmes d'aéronefs de plus en plus autonomes effectuant des missions impliquant des données aéroportées. transport de la collecte et de la charge utile. Bien que les paquets de capteurs prêts à l'emploi puissent être intégrés, la fiabilité est essentielle pour comprendre les capacités et les limites du capteur dans différents environnements. Par exemple, de fortes précipitations ou de la glace peuvent bloquer des tubes pitot, et les structures urbaines de canyon peuvent bloquer les signaux GPS.
En outre, les attitudes inhabituelles peuvent exiger l'extension aux calculs d'estimation d'état s'appuyant sur des représentations d'attitude d'angle d'Euler. Il existe un compromis inhérent entre la résilience acquise grâce à l'intégration de capteurs supplémentaires et le coût et le poids supplémentaires requis pour soutenir les capteurs redondants. Les petits drones les moins coûteux continueront probablement d'utiliser la suite de capteurs de base pour la commande de vol décrite ici. Bien que les aéronefs les plus fiables, tels que les avions de transport commercial et les avions de chasse, fondent leurs estimations d'état sur des capteurs similaires à ceux décrits ici, ils s'appuient sur la triple redondance et la diversité des capteurs pour s'assurer que le contrôleur de vol de l'avion peut compter sur un estimation précise de l'état malgré le risque de défaillance s'il y a des défaillances du capteur ou des conditions environnementales extrêmement difficiles.
La figure 10 montre l'échantillon GPS et les antécédents temporels (bruts) de l'UMI tirés d'un petit essai en vol UAS à voilure fixe. Les données GPS montrent le modèle local de flânage manuellement piloté par un pilote à travers une liaison de contrôle radio. Les historiques de temps bruts d'IMU montrent le signal mais montrent également le bruit substantiel de signal. Ce bruit résulte principalement des vibrations structurelles de la cellule induites par l'unité de propulsion (moteur) et est typique pour les petits UAS à voilure fixe avec des structures légères en bois ou en composite. Notez que les données ont été recueillies après avoir isolé l'IMU de la structure avec des supports en caoutchouc, fournissant une forte motivation pour le filtrage du signal. Dans les données de réponse temporelle, le décollage (lancement) se produit juste après 100s, et l'atterrissage est observé dans les « pics » de données de grande magnitude qui se produisent juste avant t450 s.
Remerciements
Nous remercions M. Prashin Sharma, M. Matthew Romano et le Dr Peter Gaskell de l'Université du Michigan pour leur aide dans la mise en place et la réalisation d'expériences.
References
- Langelaan, J.W., Alley, N., and Neidhoefer, J., 2011. Wind field estimation for small unmanned aerial vehicles. Journal of Guidance, Control, and Dynamics, 34(4), pp.1016-1030.
- Hallberg, E., Kaminer, I., and Pascoal, A., 1999. Development of a flight test system for unmanned air vehicles. IEEE Control Systems, 19(1), pp.55-65.
- Kim, J.H., Sukkarieh, S., and Wishart, S., 2003. July. Real-time Navigation, Guidance, and Control of a UAV using Low-cost Sensors. In Field and Service Robotics, Springer, pp. 299-309.
- Gracey, W., 1956. Wind-tunnel investigation of a number of total-pressure tubes at high angles of attack-subsonic, transonic, and supersonic speeds (No. NACA-TN-3641). National Aeronautics and Space Administration (NASA) Langley Research Center, Hampton, VA. (http://www.dtic.mil/get-tr-doc/pdf?AD=ADA377664)
- Morrison, G.L., Schobeiri, M.T., and Pappu, K.R., 1998. Five-hole pressure probe analysis technique. Flow Measurement and Instrumentation, 9(3), pp.153-158.
- Farrell, J. and Barth, M., 1999. The global positioning system and inertial navigation. New York, NY, USA, McGraw-Hill.
- Enge, P., Walter, T., Pullen, S., Kee, C., Chao, Y.C., and Tsai, Y.J., 1996. Wide area augmentation of the global positioning system. Proceedings of the IEEE, 84(8), pp.1063-1088.
- Goodrich, M.A., Morse, B.S., Gerhardt, D., Cooper, J.L., Quigley, M., Adams, J.A., and Humphrey, C., 2008. Supporting wilderness search and rescue using a camera‐equipped mini UAV. Journal of Field Robotics, 25(1‐2), pp.89-110.
- Rufa, J.R., and Atkins, E.M., 2016. Unmanned aircraft system navigation in the urban environment: A systems analysis. Journal of Aerospace Information Systems, 13(4), pp.143-160.
- Paret, D. and Fenger, C., 1997. The I2C bus: from theory to practice. John Wiley & Sons, Inc.
- S. Cesnik, C.E., Senatore, P.J., Su, W., Atkins, E.M., and Shearer, C.M., 2012. X-HALE: A very flexible unmanned aerial vehicle for nonlinear aeroelastic tests. AIAA Journal, 50(12), pp.2820-2833.
- Vasconcelos, J.F., Elkaim, G., Silvestre, C., Oliveira, P., and Cardeira, B., 2011. Geometric approach to strapdown magnetometer calibration in sensor frame. IEEE Transactions on Aerospace and Electronic Systems, 47(2), pp.1293-1306.
- Bovik, A., Huang, T.S., and Munson, D., 1983. A generalization of median filtering using linear combinations of order statistics. IEEE Transactions on Acoustics, Speech, and Signal Processing, 31(6), pp.1342-1350.
- Beard, R.W. and McLain, T.W., 2012. Small unmanned aircraft: Theory and practice. Princeton University Press.
- Yeo, D., Shrestha, E., Paley, D.A., and Atkins, E.M., 2015. An empirical model of rotorcraft UAV downwash for disturbance localization and avoidance. In AIAA Atmospheric Flight Mechanics Conference, AIAA.
- Yeo, D., Sydney, N., and Paley, D.A., 2016. Onboard flow sensing for rotary-wing UAV pitch control in wind. In AIAA Guidance, Navigation, and Control Conference.
- Degani, A. and Wiener, E.L., 1993. Cockpit checklists: Concepts, design, and use. Human Factors, 35(2), pp.345-359.
- Yeo, D., Henderson, J., and Atkins, E., 2009, August. An aerodynamic data system for small hovering fixed-wing UAS. In AIAA Guidance, Navigation, and Control Conference.
Tags
Passer à...
Vidéos de cette collection:

Now Playing
Contrôle de vol en temps réel : Étalonnage de capteurs embarqués et acquisition de données
Aeronautical Engineering
10.1K Vues

Performances aérodynamiques d'un modèle réduit d'avion : Le DC-6B
Aeronautical Engineering
8.3K Vues

Caractérisation de l'hélice : Variations du pas, du diamètre et du nombre de lame sur la performance
Aeronautical Engineering
26.1K Vues

Comportement de l'aile : Distribution de la pression sur une aile de Clark Y-14
Aeronautical Engineering
21.0K Vues

Performance des ailes du Clark Y-14 : Déploiement des dispositifs hypersustentateurs (volets et lamelles)
Aeronautical Engineering
13.3K Vues

Méthode des sphères de turbulence : Évaluation de la qualité de l'écoulement en soufflerie
Aeronautical Engineering
8.7K Vues

Flux cylindrique croisé : Mesurer la distribution de la pression et estimer les coefficients de traînée
Aeronautical Engineering
16.1K Vues

Variations du nombre de Mach et de la pression le long d'une tuyère convergente et d'une tuyère de Laval
Aeronautical Engineering
37.8K Vues

Imagerie Schlieren: Une technique pour visualiser les caractéristiques des écoulements supersoniques
Aeronautical Engineering
11.4K Vues

Visualisation de l'écoulement dans un tunnel hydrodynamique : Observation d'un tourbillon sur une aile Delta
Aeronautical Engineering
8.0K Vues

Visualisation de l'écoulement de colorants en surface : Une méthode qualitative pour visualiser les lignes de courant dans un écoulement supersonique
Aeronautical Engineering
4.9K Vues

Tube de Pitot : Un dispositif pour mesurer la vitesse du flux d'air
Aeronautical Engineering
48.7K Vues

Anémomètre à température constante : Un outil pour étudier les écoulements dans la couche limite turbulente
Aeronautical Engineering
7.2K Vues

Transducteur de pression : Calibrage à l'aide d'un tube de Pitot
Aeronautical Engineering
8.5K Vues

Aérodynamique des multicoptères : Caractérisation de la poussée sur un hexacoptère
Aeronautical Engineering
9.1K Vues
À PROPOS DE JoVE
Copyright © 2025 MyJoVE Corporation. Tous droits réservés.