
אפיון מנוע אינדוקציה AC
Overview
מקור: עלי באזי, המחלקה להנדסת חשמל, אוניברסיטת קונטיקט, סטורים, CT.
מטרות הניסוי הן למצוא את הפרמטרים המעגליים המקבילים של מנוע אינדוקציה תלת פאזי באמצעות המעגל המקביל לכל שלב ובדיקות דומות לאלה המשמשות באפיון שנאי. בהנדסת חשמל, ניתן לקבוע מעגל שווה ערך (או מעגל תיאורטי) עבור מערכת נתונה. המעגל המקביל שומר על כל המאפיינים של המערכת המקורית, ומשמש כמודל כדי לפשט את החישובים. מטרה נוספת היא להפעיל את המנוע באזור מהירות המומנט הליניארי.
Principles
מנוע האינדוקציה המשולש ניזון ממתחים תלת פאזיים או זרמים הגורמים לשלושה שדות מגנטיים. שדות אלה מסתכמים בשדה מגנטי מצטבר, המסתובב בחלל במשרעת מתמדת ומכונה השדה המגנטי סטטור. השדה המגנטי גורמת לזרם בפסי רוטור מתכת או סלילים, אשר בתורו לגרום לשדה המגנטי שלהם, המכונה השדה המגנטי רוטור. הרוטור תלוי בתוך הסטטור, והשדה המגנטי של הרוטור מנסה להינעל על השדה המגנטי המסתובב, מה שגורם לרוטור להסתובב. הרוטור עשוי בדרך כלל מפסי רוטור הקשורים בטבעות קצה, ויוצרים את מה שמכונה בדרך כלל "כלוב סנאי".
המעגל המקביל לכל שלב מדגים את ההתנגדות המתפתלת בצד הסטטור והרוטור R1 ו- R2,בהתאמה, אינדוקציה של דליפה עקב שטף דלף בין הרוטור לסטטור (L1 הוא אינדוקציה דולפת סטטור, ו- L2 הוא אינדוקציה דולפת רוטור), אינדוקציה ממגנט הדדית (Lm או reactance Xm),והפסדי ליבה בהתנגדות המקבילה לאובדן הליבה RC . אלה דומים לדגם המעגל המקביל של השנאי, אך כוללים את ההשפעה של פיגור שדה מגנטי רוטור מאחורי הסטטור, אשר מכונה להחליק.
על מנת למצוא את דגם המעגל המקביל של המנוע, יש לבצע מספר בדיקות (ללא עומס, נעילת רוטור, DC ובדיקות עומס). בדיקות אלה דורשות את הידע של דירוגי מנוע. עבור המתח המדורג של 208 V ב- 60 הרץ, יש לציין את הדברים הבאים מטה מהלכת: הספק מדורג (hp ו- W, כאשר 1 כ"ס = 746 W), זרם מדורג (A) ומהירות מדורגת (סל"ד ורד/שני). מדירוגים אלה, ניתן למצוא את המומנט המדורג (N·m) על-ידי חלוקת הכוח המדורג בווטס מעל המהירות המדורגת ב- rad/s (1 סל"ד = 2π/60 rad/s), שאינו מוצג על לוחית השם.
כדי לטעון את פיר מכונת האינדוקציה, גנרטור DC (הגדרת דינמומטר) מצמידים מכנית לפיר. מנוע האינדוקציה משמש כעלובר העיקרי של הגנרטור. ככל שהעומס החשמלי גדל על הגנרטור, הכוח המכני עולה לתוך הגנרטור ומחוץ למנוע האינדוקציה, ובכך מגדיל את העומס על פיר מנוע האינדוקציה.
Procedure
1. מבחן DC
שימו לב שלמכונת אינדוקציה של כלוב סנאי יש רק מסופי סטטור נגישים.
- הפעל את ספק הכוח DC בהספק נמוך והגביל את הזרם ל- 1.8 A.
- כבה את האספקה.
- חבר את מסופי האספקה על פני שני מסופי מנוע אינדוקציה (הנקראים A, B ו- C).
- הפעל את האספקה ורשום את מתח היציאה והזרם.
- חזור על הפעולה עבור שני שילובי השלבים האחרים.
- שים לב שההתנגדות הנמדדת היא לשני שלבים בסדרה, ולכן ההתנגדות לכל שלב היא חצי מהמדידה.
2. בדיקת אי-טעינה
בדוק את מכונת האינדוקציה ללא עומס כדי למצוא את הפרמטרים ענף מגנטי לפי פאזה Xm ו- RC. עבור בדיקה זו, ודא דינמומטר העומס יש את כל המסופים שלה מנותק, שבו הוא אינו מייצר כוח ותומך ללא עומס.
- ודא שהמקור המשולש כבוי.
- בדוק כי VARIAC הוא ב 0% ולאחר מכן חוט VARIAC לשקע תלת פאזי, ולחבר את ההתקנה (איור 1).
- בדוק שוב שחיבורי המעגלים מוצגים כפי שמוצג ב- Fig. 1 ולאחר מכן הפעל את המקור המשולש.
- הגדל במהירות את תפוקת VARIAC עד שכל אחד מדדי הכוח הדיגיטליים יקרא סביב 208 V.
- הקלט את קריאות העוצמה, המתח והזרם משני המטרים.
- מדוד את המהירות באמצעות האור המהבהב (כוון את האור המהבהב למהירות סבירה), וסמן את המדידה כ- ωo.
- הקלט את קריאת המומנט ב- N·m או lb·ft, וסמן את המדידה כ- To רק למקרה שהמתמר המומנט או מנגנון מדידת המומנט אינם מכוילים היטב. זה מומנט ללא עומס.
- הגדר את VARIAC בחזרה ל- 0% ולאחר מכן כבה את המקור המשולש. תשאיר את שאר המעגל שלם.
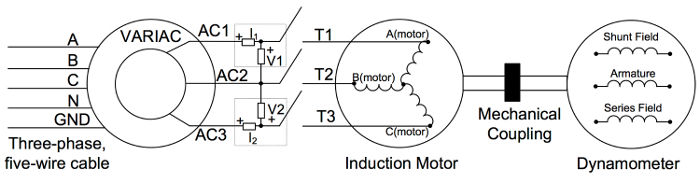
איור 1: התקנה חשמלית לבדיקה ללא עומס. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
3. מבחן רוטור נעול
בדוק את מכונת האינדוקציה עם רוטור נעול באופן דומה למבחן קצר של שנאי. השתמש בבדיקה זו כדי למצוא את התנגדויות הסדרה לפי שלב ואת אינדוקציה דליפה. עבור בדיקה זו, ודא שדינמומטר העומס ניתק את כל המסופים שלו.
- ודא שהמקור המשולש כבוי.
- ודא כי VARIAC הוא ב 0%.
- נעל את הרוטור בצד הדינמומטר באמצעות מהדק מכני או הגדרת מומנט אפס, אם הדינמומטר נשלט דיגיטלית.
- שים לב שההגדרה עדיין דומה לזו של איור 1, למעט עם רוטור נעול.
- בדוק שוב שחיבורי המעגלים מוצגים כפי שמוצגים ב- Fig. 2.
- הפעל את המקור התת-פאזי ואת מתג מכונת האינדוקציה.
- הגדל לאט ובזהירות את ה- VARIAC עד להגעה לזרם המדורג באחד מדי הכוח הדיגיטליים או בשניהם.
- הקלט את קריאות העוצמה, המתח והזרם משני המטרים.
- הגדר את VARIAC בחזרה ל- 0% ולאחר מכן כבה את המקור המשולש. תשאיר את שאר המעגל שלם.

איור 2: התקנה לבדיקת עומס.
4. בדיקת עומס
השתמש בבדיקה זו כדי לעקוב אחר מהירות האקט הליניארית האופיינית למכונת האינדוקציה. עבור בדיקה זו, השתמש בדינמומטר עם שדה דלף כגנרטור (עוד על מצב הפעלה זה ניתן מאוחר יותר בסרטון מכונות DC, אבל armature הוא יציאת פלט גנרטור).
- ודא שהמקור המשולש ומתג מכונת האינדוקציה כבויים.
- ודא כי VARIAC הוא ב 0%.
- הסר את מהדק הנעילה מפיר הרוטור.
- חבר את המעגל (איור 2). השתמש RL= 300Ω אבל לשמור על SD כבוי.
- אל תשתמש בשדה הסידרה.
- בדוק את המעגל ולאחר מכן הפעל את המקור המשולש ואת מתג מכונת האינדוקציה.
- הגדל במהירות את תפוקת VARIAC עד שכל אחד מדדי הכוח הדיגיטליים יקרא סביב 208 V.
- הקלט את קריאות העוצמה, המתח והזרם משני המטרים.
- למדוד את המהירות ולתייג אותו כמו ω1. כדי למדוד את המהירות, התאימו את ידית התדר "גסה" על האור המהבהב עד שהפיר ייראה כמעט נייח, ולאחר מכן כווננו את הגדרת התדר באמצעות הידית "בסדר".
- הקלט את קריאת מומנט ותייג אותו כ- T1.
- שים לב כי נקודת הפעלה זו (ω1, T1) אינה זהה ללא עומס, מכיוון שמתפתל השדה פועל גם כעומס במקביל לארקטורה. כמו SD הופך מאוחר יותר RL הוא ירד, העומס גדל מאז זרם העומס גדל כמו RL פוחת.
- הפעל את SD. למדוד את המהירות ולתייג אותו כמו ω2.
- הקלט את קריאת מומנט ותייג אותו כ- T2.
- כבה את SD. שנה RL ל- 200 Ω ולאחר מכן הפעל את SD.
- למדוד את המהירות ולתייג אותו כמו ω3.
- הקלט את קריאת מומנט ותייג אותו כ- T3.
- הפעל את SD. שנה RL ל 100 Ω. הפעל את SD.
- למדוד את המהירות ולתייג אותו כמו ω4.
- הקלט את קריאת מומנט ותייג אותו כ- T4.
- הגדר את ה- VARIAC ל- 0%, כבה את המקור המשולש ופרק את המעגל.
Results
טעות נפוצה במציאת הפרמטרים המעגליים המקבילים של מכונות אינדוקציה היא להשתמש בכוח הנמדד תלת פאזי בחישובים של המעגל המקביל לכל שלב, בעוד שליש מהכוח צריך לשמש: שלושה שלבים צורכים את הכוח הנמדד, ולכן, שליש מהכוח נמצא בשלב אחד.
חישובים של הפרמטרים המעגל המקביל דומים לאלה של שנאים, אבל זה נפוץ לפצל X1 ו X2' לכל מסגרת NEMA של המכונה. לדוגמה, אם המנוע הוא של מסגרת NEMA A או D, אז X1 ו- X2' הם להניח להיות שווה, בעוד אם המנוע הוא של מסגרת NEMA B, אז X1 ו- X2' מחולקים כמו 40% ו 60% של X eq, בהתאמה, ואם המנוע הוא של מסגרת NEMA C, לאחר מכן X1 ו- X2' מחולקים כ- 30% ו- 70% מ- Xeq, בהתאמה. הוא צפוי לגלות כי X1 ו- X2' הם 1-10% של Xm, R1 ו- R2' הם בסדר גודל של mΩ למספר Ω בהתאם לדירוג הכוח המוטורי, ו- RC יהיה בסדר גודל של עשרות עד מאות Ω, שכן הוא מספר סדרי גודל גדולים יותר מ- R1 ו- R2'.
האזור הליניארי של עקומת מומנט מנוע האינדוקציה נמצא באמצעות בדיקת העומס וניתן לשער אותו מתנאים ללא עומס לתנאי עומס מלא או קצב. עקומת מומנט-מהירות טיפוסית מוצגת ב- Fig. 3 עבור מספר מסגרות NEMA והאזור הליניארי הוא האזור הימני ביותר קרוב למהירות של 90-100%.
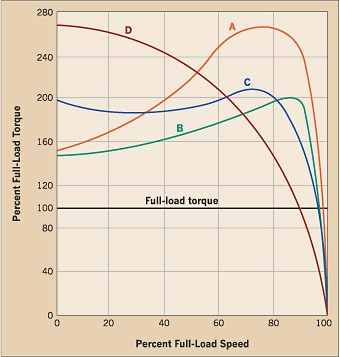
איור 3: עקומות מומנט אופייניות למסגרות NEMA שונות.
Application and Summary
מכונות אינדוקציה תלת פאזיות, במיוחד מנועי אינדוקציה, הם סוסי העבודה של התעשייה המודרנית. אפיון הולם של מנוע אינדוקציה מספק למהנדסים ולטכנאים מידע על יעילות המנוע ומאפייני מהירות המומנט. אלה חיוניים בקביעת גודל המנוע והמסגרת המתאימים ביותר ליישום. ברגע שמנוע מאופיין ועקומת מהירות המומנט ידועה מפרמטרי מעגל מקבילים באמצעות הבדיקות המתוארות, למסגרות NEMA שונות יש צורות עקומות שונות. לדוגמה, יישום מעלית דורש מומנט התחלתי גבוה; לכן, מסגרות, כגון מסגרת NEMA D, מתאימות יותר מ- A או B. כאשר מתמודדים עם החלקים האינטגרליים של מנוע האינדוקציה של מערכות גדולות יותר הצורכות כמויות ניכרות של אנרגיה(למשל,צ'ילרים), לדעת את הפרמטרים המעגל המקבילים של מנוע יכול לספק הערכות טובות של יעילות המנוע ותרומתו לצריכת אנרגיה באותה מערכת גדולה יותר.
Tags
Skip to...
Videos from this collection:

Now Playing
אפיון מנוע אינדוקציה AC
Electrical Engineering
11.7K Views

אמצעי זהירות חשמליים וציוד בסיסי
Electrical Engineering
144.9K Views

אפיון רכיבים מגנטיים
Electrical Engineering
15.1K Views

מבוא ללוח עמודי החשמל
Electrical Engineering
12.5K Views

ממיר האצת DC/DC
Electrical Engineering
57.2K Views

ממיר DC/DC Buck
Electrical Engineering
21.2K Views

ממיר Flyback
Electrical Engineering
13.3K Views

רובוטריקים חד פאזיים
Electrical Engineering
20.2K Views

מפסקים חד פאזיים
Electrical Engineering
23.6K Views

מאמת תיריסטור
Electrical Engineering
17.6K Views

מהפך חד פאזי
Electrical Engineering
18.0K Views

מנועי DC
Electrical Engineering
23.5K Views

מכונת אינדוקציה AC הניזונה מ- VFD
Electrical Engineering
7.0K Views

סינכרון מחשב סינכרוני AC
Electrical Engineering
21.6K Views

אפיון מכונה סינכרוני AC
Electrical Engineering
14.3K Views
Copyright © 2025 MyJoVE Corporation. All rights reserved