
מנועי DC
Overview
מקור: עלי באזי, המחלקה להנדסת חשמל, אוניברסיטת קונטיקט, סטורים, CT.
מכונת DC פועלת עם זרמי DC ומתחים בניגוד למכונת AC, הדורשת זרמי AC ומתחים. מכונות DC היו הראשונות שהומצאו ולהשתמש בשני שדות מגנטיים הנשלטים על ידי זרמי DC. ניתן להגדיר מחדש את אותה מכונה בקלות להיות מנוע או גנרטור אם עירור שדה מתאים זמין, שכן למכונת DC יש שני שדות המכונים שדה וארמטורה. השדה נמצא בדרך כלל בצד הסטטור והארטורה נמצאת בצד הרוטור (ממול או מבפנים החוצה בהשוואה למכונות AC). עירור שדה יכול להיות מסופק על ידי מגנטים קבועים או מתפתל (סליל). כאשר הזרם מוחל על הזרוע או סליל הרוטור, הוא עובר ממקור DC ל סליל דרך מברשות נייחות וטבעות החלקה המותקנות על הרוטור המסתובב נוגע במברשות. כאשר סליל זרוע הרוטור הוא לולאה נושאת זרם, והוא חשוף לשדה חיצוני מן הסטטור או מגנט שדה, כוח מופעל על הלולאה. מכיוון שהלולאה "תלויה" משני צידי המנוע באמצעות מסבים, הכוח מייצר מומנט שיסובב את פיר הרוטור במקום להזיז אותו לכל כיוון אחר.
סיבוב זה גורם לשדות המגנטיים להתיישר אך יחד עם זאת, טבעות החלקה מחליפות צדדים במברשות, או "לנסוע", וזה מה שמכונה תהליך ההחלמה. כאשר קומוטציה זו מתרחשת, הזרימה הנוכחית בסליל הרוטור הפוכה ושדות מגנטיים מתנגדים זה לזה שוב, מה שגורם מומנט נוסף באותו כיוון הסיבוב. תהליך זה נמשך ופיר הרוטור מסתובב ומספק פעולה מוטורית. בפעולת גנרטור, סיבוב מכני מסופק לפיר הרוטור והזרם זורם מתוך הרוטור לאחר שהוא מושרה עקב סליל נע מתחת לשדה מגנטי.
למכונות שנדונו בניסוי זה יש שדה מתפתל ולא מגנטים קבועים. תהליך קומוטציה שהוא קריטי בתפעול מכונת DC משתמש בטבעות החלקה ובמברשות כדי להעביר אנרגיה מהרוטור (armature) לעולם החיצון מכיוון שהרוטור מסתובב וחוטים מסתובבים יסובבו וישברו אותם. עם זאת, מברשות אלה טבעות להחליק יש חסרונות אמינות גדולים כפי שהם דורשים תחזוקה קבועה, החלפת מברשת, ניקוי, ועלול לגרום ניצוצות. זה הוביל להחלפת רוב מכונות DC על ידי מכונות AC שאין להם בעיות אלה, ומכונות DC הנותרות יש בעיקר עירור שדה מגנט קבוע, כגון בצעצועים וכלים פשוטים בהספק נמוך. מכונות AC המכונות מכונות DC ללא מברשות (או BLDCs) הן מכונות AC המשתמשות במקור DC ומהפך אלקטרוני כוח כדי לקבל מתחי AC מתוך המהפך.
מטרת הניסוי היא לבחון שתי תצורות עיקריות של מכונת DC: דלף וסדרות. הבדיקות נועדו להעריך את השטף השיורי במכונה וללמוד את המאפיינים ללא עומס וטעינה של תצורות שונות.
Principles
קיימות ארבע תצורות עיקריות של מכונות DC: נרגשות בנפרד, דלף, סדרה ומתחם. תצורות אלה מסווגות על סמך מיקום עירור השדה, שבו השדה הוא אחד השדות המגנטיים הדרושים להפעלת המכונה כמנוע או גנרטור. מכיוון שמפותל השדה מופעל על ידי מקור DC, מקור זה יכול להיות זהה לזה שמפעיל את הזרוע של מנוע DC, או יכול להיות נפרד. כאשר נפרדים, המכונה נקראת "נרגשת בנפרד", וכאשר לא, מיקום השדה המתפתל במעגל המנוע קובע איזה סוג של תצורה הוא. אם פיתול השדה ממוקם במקביל לפיתול הזרוע כדי לראות את אותו מקור מתח המפעיל את הזרוע, המכונה נמצאת בתצורה המקבילה או הדלף.
אם מתפתל השדה נמצא בסדרה עם פיתול הזרוע כך שיש להם את אותה זרימת זרם, המכונה נמצאת בתצורת הסדרה. אם שני פיתולים זמינים, כלומר דלף ופיתולים סדרה משמשים, אז המכונה נמצאת בתצורה המורכבת. התצורה הנרגשת בנפרד אינה תלויה בזרוע וניתן להסדיר אותה כדי לתמוך בעומסים שונים באמצעות שליטה אוטומטית. עם זאת, תצורות דלף, סדרה ותצורות מורכבות שואבות זרם מאותו מקור זרוע ולכן מושפעות משינויי המתח של העומס והרמטוריות.
ללא עירור שדה, מגנטיות שיורית בשל השדה המגנטי שיורית (λR) במכונה משמשת כמקור לעריאת שדה מינורית. זה יכול לבוא לידי ביטוי כמונח נוסף בחזרה e.m.f. (E)משוואת "λRω" אשר מתווסף"KIFω" שבו ω הוא המהירות המכנית של המכונה. עבור מכונת DC מורכבת, EA הוא כך,
EA= KshIFshω+ KseIFseω+ λRω, (1)
כאשר"se" מייצג את הסדרה, "sh" מייצג את דלף, ומונחי K הם קבועי שדה המקשרים זרם שדה ומהירות מכנית לחלק האחורי e.m.f. זכור שערכי K קבועים עד להגעה למגבלת רוויה, ולאחר מכן EA מתרוות לערך מסוים.
באופן אידיאלי, λR הוא ההנחה להיות אפס, אבל זה לא מציאותי. על מנת לקבוע λR, מכונת DC מופעלת כגנרטור ללא עירור דלף או סדרה וללא עומס. לכן, מתח המסוף נמדד VA=EA. אם נמדד ω, ניתן לקבוע את ה- λR. EA הוא מתח אופייני של מכונות DC, מתח המונה את מתח armature כדי להגביל את הזרם לתוך המכונה. בפעולת המנוע, ה- EA קטן ממתח הזרוע, וה- EA גבוה יותר מוביל להגרלה פחות של זרם הזרוע. הוא תלוי במהירות הפיר כפי שמוצג במשוואה 1, ולכן בעל EA גבוה יותר גורם לפעולה במהירות גבוהה יותר. ביישומי גנרטור, EA הוא המתח המושרה מסובב שדה מגנטי אחד על armature לעומת השדה.
עבור מכונת דלף, משוואה 1 עדיין מחזיקה, אך IFse מוגדר לאפס; עבור מכונת סידרה, משוואה 1 עדיין מחזיקה, אך IFsh מוגדר לאפס. מכונות מורכבות מחוברות הן דלף והן סדרות והוא יכול להיות בצורה ארוכה או קצרה. כאשר שני השדות קיימים, השפעתם יכולה להוסיף או להתנגד זה לזה כפי שניתן לראות על-ידי הזרוע, ותצורות אלה מכונה מצטברות או דיפרנציאליות. ניתן להשיג תצורות אלה על-ידי שינוי המיקום של שדה הדלף לפני או אחרי שדה הסידרה, ועל-ידי הזנת זרמי השדה או השארת הנקודות המתאימות להם. תמונה. 1-4 מראה את כל ארבע התצורות.
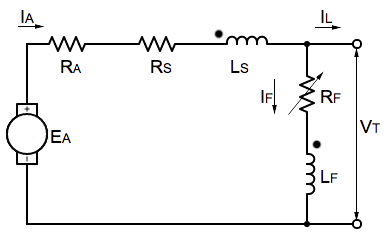
איור 1: סכמטי של תצורה מצטברת ארוכה.
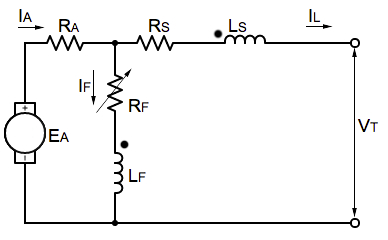
איור 2: סכמטי של תצורה מצטברת של תרכובת קצרה.
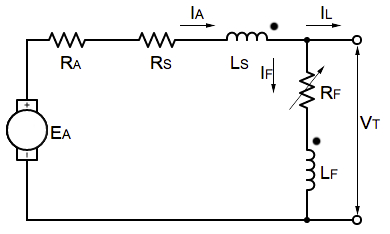
איור 3: שרטוט של תצורה מורכבת ארוכה דיפרנציאלית.

איור 4: שרטוט של תצורה מורכבת קצרה דיפרנציאלית.
מטרת הניסוי היא להשוות קשרי זרם, מתח ועומס בסדרות ומנועי DC מוגדרים. מכיוון שרק ספק כוח DC אחד בהספק גבוה זמין בהדגמה זו, פעולה נרגשת בנפרד אינה מכוסה. עבור תצורות דלף וסדרות, המנוע העיקרי של מחולל DC הוא מנוע סינכרוני המווסת את מהירותו ל-1800 סל"ד. בכל פעם שנדרשת מדידה נוכחית של DC, כגון IA או IFsh, השתמש בריבוי מטר דיגיטלי במצב הנוכחי (ודא שהמסופים במונה הרב-מטר נמצאים בתצורה הנוכחית).
Procedure
1. בדיקות DC
- עם ספק הכוח DC בהספק נמוך מוגבל ל- 0.8 A, חבר את מסופי האספקה לא armature מכונת DC.
- תעד את המתח בוושינגטון ואת קריאות הזרם של האספקה.
- להעריך את ההתנגדות של כל פיתול.
- חזור על הפעולה עבור פיתולים אחרים, שדה דלף ושדה סידרה, אחד בכל פעם.
- כבה ונתק את ספק הכוח DC בצרימת חשמל נמוכה.
- הגדר את הרוסטטית השדה המובנית להתנגדות מרבית ומדוד את התנגדותו.
- הגדר את שדה הסידרה rheostat (חיצוני) להתנגדות המרבית ולמדוד את ההתנגדות שלה.
2. הגדרת פריים-מובר ומגנטיות שיורית
ראש-מוביל בניסוי זה הוא המכונה הסינכרונית, הפועלת כמנוע המסובב את רוטור גנרטור DC (armature).
- ודא שמתג הניתוק תלת-פאזי, מתג המנוע הסינכרוני ומתג מנוע DC כבויים.
- ודא כי VARIAC הוא ב 0%.
- התחבר את ה-VARIAC לשקע תלת-פאזי וחבר את ההתקנה המוצגת ב- Fig. 5.
- ודא כי הבורר "התחל/הפעל" נמצא במצב "התחל".
- הפעל את מתג הניתוק המשולש.
- הפעל את ספק הכוח DC במתח גבוה.
- ודא שכל החיבורים פנויים ממסופי האספקה.
- לחץ על כפתור "V/I DIS" באספקה כדי להציג את נקודות ההפעלה המתח והזרם. כוונן את ידית המתח ל-125 וולט.
- אל תלחץ על לחצן התחל.
- לחץ על כפתור "התחל" בלוח ספק הכוח DC.
- הגדל באיטיות את פלט VARIAC עד ש- VAC1 יקרא 120 V.
- כאשר המנוע הסינכרוני מגיע למהירות מצב יציבה, הפוך את המתג 'התחל/הפעל' למצב 'הפעלה'.
- מדוד והקליט את מהירות הסיבוב באמצעות נורית המהבהב והקלט VA.
- כבה את ספק הכוח DC והחזר את ה- VARIAC ל- 0%.
- אפס את הבורר "התחל/הפעל" ל"התחל".
- כבה את מתג הניתוק המשולש.
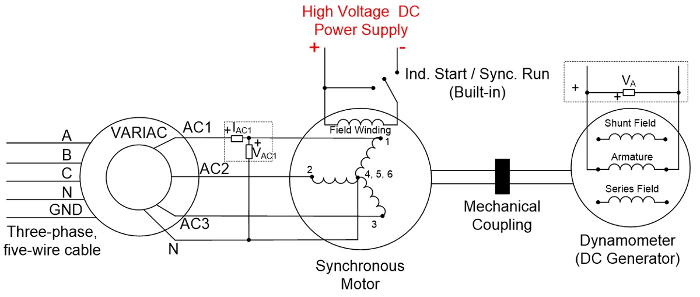
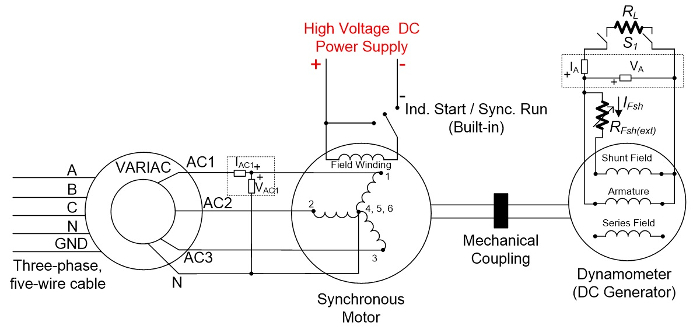
איור 5: שרטוט של אופן ההגדרה של ראש-מוביל. אנא לחץ כאן כדי להציג גירסה גדולה יותר של איור זה.
3. אפיון מחולל דלף DC
- בצד מחולל DC, חבר את שדה הדלף במקביל לשדה הזרוע כפי שמוצג ב- Fig. 6.
- השתמש rheostat המובנה עבור RFsh(שלוטה), ולהשתמש במונה רב כ ammeter כדי למדוד IFsh.
- שמור על "S1"פתוח לבדיקה ללא עומס.
- שמור על "RFsh ( שלו)" בהתנגדות מקסימלית.
- הפעל את מתג הניתוק המשולש.
- לחץ על כפתור "התחל" בלוח ספק הכוח DC.
- הגדל באיטיות את פלט VARIAC עד ש- VAC1 יקרא 120 V.
- כאשר המנוע הסינכרוני מגיע למהירות מצב יציבה, הפוך את המתג "התחל/רוץ" למצב "הפעל".
- מדוד את מהירות הפיר באמצעות טכניקת האור המהבהב המתוארת במקום אחר.
- הקלט VA במצב ללא עומס זה בצד מחולל DC.
- הפחת RFsh(שלוט) עד שהמתח שנוצר ב- VA הוא סביב 150 V.
- לאחר נקודה זו, הפחת את "RFsh ( שלוחת)" בחמישה צעדים כמעט שווים עד להשגת ההתנגדות המינימלית.
- עבור כל שלב, למדוד VA ו-I Fsh.
- השאר RFsh (שלוטת) בערך המינימלי שלו.
- כבה את ספק הכוח DC.
- הקטן את פלט VARIAC ל- 0%.
- הזז את האמטר ממדידת IFsh כדי למדוד IA.
- הפעל מחדש את ההתקנה כמתואר קודם לכן.
- הגדר RL ל 300 Ω, ולהדליק את "S1". מדוד VA ואני A.
- כבה את "S1",הגדר RL ל- 200 Ω ולאחר מכן הפעל את "S1". מידה VA, ואניA.
- כבה את "S1",הגדר את RL ל- 100 Ω ולאחר מכן הפעל את "S1". מידה VA, ואניA.
- כבה את ספק הכוח DC והגדר את פלט VARIAC ל- 0%.
- שמור את צד הגנרטור הסינכרוני של ההתקנה ללא פגע.
- נתק את חיבורי מחולל DC.
- אפס את הבורר "התחל/הפעל" ל"התחל".
- כבה את מתג הניתוק המשולש.
איור 6: שרטוט של הגדרת מחולל DC דלף. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
4. אפיון מחולל סדרת DC
- בצד מחולל DC, חבר את שדה הסדרה בסדרה עם שדה armature כפי שמוצג תאנה 7.
- השתמש ברוסטטית החיצונית עבור RFse(שלוקט).
- השתמש rheostat המובנה כמו RL ויש לו בהתנגדות מקסימלית.
- שמור על "S1"פתוח לבדיקה ללא עומס.
- שמור RFse (שלולת) בהתנגדות מקסימלית.
- הפעל את מתג הניתוק המשולש.
- לחץ על כפתור "התחל" בלוח ספק הכוח DC.
- הגדל באיטיות את פלט VARIAC עד ש- VAC1 יקרא 120 V.
- כאשר המנוע הסינכרוני מגיע למהירות מצב יציבה, הפוך את המתג "התחל/רוץ" למצב "הפעל".
- מדוד VA במצב זה ללא עומס בצד מחולל DC.
- הפעל את "S1"והפחת את RFse (שלוקט) לפי הצורך כדי לראות VAשאינו אפס.
- ערוך RL בחמישה שלבים כמעט שווים עד להגעה להגדרה של 50%, מוגדר ל- 300 Ω וההפעלה של "S1". למדוד את המהירות, VA,ואני A.
- כבה את "S1",הגדר RL ל- 200 Ω ולאחר מכן הפעל את "S1". למדוד את המהירות, VA,ואני A.
- כבה את "S1",הגדר את RL ל- 100 Ω ולאחר מכן הפעל את "S1". למדוד את המהירות, VA,ואני A.
- כבה את ספק הכוח DC.
- הגדר את פלט VARIAC ל- 0%.
- שמור את צד הגנרטור הסינכרוני של ההתקנה ללא פגע.
- נתק את חיבורי מחולל DC.
- אפס את הבורר "התחל/הפעל" ל"התחל".
- כבה את מתג הניתוק המשולש.
- לפרק את כל החוטים והמטרים.

איור 7: שרטוט של הגדרת מחולל DC של הסדרה. אנא לחץ כאן כדי להציג גרסה גדולה יותר של איור זה.
<
Results
פיתולי הסדרה נושאים בדרך כלל זרם גבוה המדורג בזרם הזרוע המדורג של המכונה, שכן הן סדרות והן פיתולי הזרוע נמצאים בסדרה. לכן, פיתולים סדרות צפויים להיות בסדר גודל של mΩ לכמה Ω. פיתולים דלף לעומת זאת צריך לצייר זרם מינימלי מהמקור אשר כוח אותם יחד עם armature של המכונה, ולכן, יש ערכי התנגדות גדולים של עשרות עד מאות או אפילו אלפי Ω.
ניתן להעריך את שאריות ה- λR על ידי מדידת מתח הזרוע ללא עומס. מכיוון שזה מצב ללא עומס, e.m.f. האחורי ומתח armature זהים, ואת e.m.f. (EA)האחורי הוא פונקציה של λR כך EA=אניf λRωm שבו אניf הוא זרם השדה ו ωm הוא המהירות המכנית.
לכל סוג של מכונה יש עקומת זרם מתח או מומנט משלה. היתרון של מחוללי דלף הוא שהם יכולים לספק מתח מבלי שיהיה עומס עד עומס מלא, בעוד גנרטורים סדרה מאופיינים על ידי לא להיות מסוגל לספק כל מתח אלא אם כן יש עומס כלשהו.
Application and Summary
מכונות DC הן פחות נפוצות באופן משמעותי ממה שהיו לפני המצאת אינדוקציה AC ומכונות סינכרוניות. הם נשארים נפוצים ביישומי הספק נמוך פשוטים כגון צעצועים, רובוטים קטנים וציוד מדור קודם. מכונות DC מגנט קבוע, המשתמשות בשפע מגנטים אדמה לא נדירים, שכיחות יותר מאשר חלקי דלפק דלף וסדרות שלהם בשל עירור פשוט יותר, במיוחד ביישומים בעלות נמוכה ומורכבות נמוכה.
Tags
Skip to...
Videos from this collection:

Now Playing
מנועי DC
Electrical Engineering
23.5K Views

אמצעי זהירות חשמליים וציוד בסיסי
Electrical Engineering
144.8K Views

אפיון רכיבים מגנטיים
Electrical Engineering
15.1K Views

מבוא ללוח עמודי החשמל
Electrical Engineering
12.5K Views

ממיר האצת DC/DC
Electrical Engineering
57.1K Views

ממיר DC/DC Buck
Electrical Engineering
21.2K Views

ממיר Flyback
Electrical Engineering
13.3K Views

רובוטריקים חד פאזיים
Electrical Engineering
20.2K Views

מפסקים חד פאזיים
Electrical Engineering
23.5K Views

מאמת תיריסטור
Electrical Engineering
17.6K Views

מהפך חד פאזי
Electrical Engineering
18.0K Views

אפיון מנוע אינדוקציה AC
Electrical Engineering
11.7K Views

מכונת אינדוקציה AC הניזונה מ- VFD
Electrical Engineering
7.0K Views

סינכרון מחשב סינכרוני AC
Electrical Engineering
21.6K Views

אפיון מכונה סינכרוני AC
Electrical Engineering
14.3K Views
Copyright © 2025 MyJoVE Corporation. All rights reserved