
リアルタイムフライトコントロール:埋め込みセンサーキャリブレーションとデータ取得
概要
ソース:エラ・M・アトキンス、ミシガン大学航空宇宙工学科、アン・アーバー、ミシガン州
概要
オートパイロットを使用すると、航空機の向き、角速度、対気速度を測定する機内センサーから収集されたデータを使用して、航空機を安定化できます。これらの量は、航空機が自動的に打ち上げ(離陸)から回復(着陸)までの飛行計画に従うように、自動操縦によって調整することができます。同様のセンサーデータは、大型の固定翼商用輸送機から、4つのスラスターユニットを備えたクワッドコプターなどの小規模なマルチローターヘリコプターまで、あらゆるタイプの航空機を制御するために収集されます。
全地球測位システム(GPS)などのセンサーによって捕捉された慣性位置と速度により、自動操縦リアルタイム飛行制御システムは、マルチコプターまたは固定翼航空機が所定の姿勢と対気速度を安定させるためのもの軌道。センサーの統合、キャリブレーション、データ取得、および信号フィルタリングは、飛行制御の実験の前提条件です。
ここでは、飛行制御に必要なデータを提供するセンサー スイートについて説明します。2つの異なる組み込みコンピュータプラットフォーム上の信号インターフェースとデータ取得について説明し、センサーキャリブレーションを要約します。単一チャネル移動平均フィルタと中央値フィルタは、各データチャンネルに適用され、高周波信号ノイズを低減し、外れ値を排除します。
この実験では、リアルタイム飛行制御のためのデータ取得とセンサーキャリブレーションを行います。いくつかの公表された論文は、センサーデータの収集と制御の原則を説明しており、最近では小型無人航空機(UAV)用のセンサーに焦点を当てています[1-3]。
原則
航空機は、空力と推進システムを通じて、その力と瞬間のバランスを取る必要があります。図 1aに示すように、固定翼航空機は、空力リフト、空力ドラッグ、推進システム推力、および重量の 4 つの力を安定した飛行でバランスさせます。固定翼航空機は、上下にピッチ、上昇または降下、左または右にロールして新しい針路に旋回します。
図 1bおよび1cに示すように、ホバリング マルチコプターは、スラスターユニットによって生成された上向きの推力と重量のバランスをとる必要がありますが、その推力が空力ドラッグのバランスをとるように、かなりの速度で飛行するマルチコプターが回転します。安定した飛行を達成するためには、航空機も3つの軸すべてについてモーメントのバランスを取る必要があります。回転は、3 次元 (3D) フライトの次の規則で定義されます。
- ロール(Φ) - 車両の前方を指す軸を中心とした回転(x)、左右の動きをもたらす
- ピッチ (θ) – 左から右(y)に走る軸を中心に回転し、前方および後方に傾く動きを引き起こす
- ヨー (+) – 垂直軸(z)を中心とした回転を行い、見出し角度の変更が発生します。
フライトコントロールシステムは、図1に示すように、航空機のロール、ピッチ、ヨーの姿勢、バランス力を安定化するモータおよび制御表面コマンドを発行します。コマンドは、航空機が風などの妨害を修正できるように、確実かつリアルタイムで更新する必要があります。所定の姿勢を達成し維持するために、制御システムは、航空機の姿勢(ロール、ピッチ、ヨー)と時間の経過に合った姿勢の変化(角度速度)の正確な推定値を維持する必要があります。リフトやドラッグなどの力は気流に大きく依存するため、航空機に対する対気速度(図1のV)と気流方向を決定するために追加のセンシングが必要です。所定の軌道をたどるには、航空機もGPSなどのセンサーを通してその位置を感知する必要があり、飛行制御を可能にする航空機センサーを図2に示します。
センサーからデータを取得すると、信号がフィルタリングされ、処理されたデータ品質に対するノイズや外れ値の影響を軽減できます。次に、データは、3D 位置、線形速度、方向(姿勢)、角度速度など、航空機の状態の完全な推定値に集計されます。航空機の状態はフライト コントローラに送信され、固定翼構成の航空機スラスターまたは制御サーフェスにコマンドが更新されます。
航空機センサー
固定翼やマルチコプターを含む航空機は、慣性測定ユニット(IMU)と呼ばれるセンサースイートを使用して、3D航空機の姿勢と角速度を決定します。IMU は通常、線形加速度を測定する加速度計の 3 つのセンサー タイプで構成されます。角速度を測定するためにジャイロスコープ(ジャイロ)を評価します。局所磁場の方向と強度を測定する磁場センサを使用します。図 3に示すように、3 軸 IMU は、3 軸参照座標系で構成されています。3つの加速度計、3つのレートジャイロ、3軸磁力計を含む合計9つの感知要素は、線形加速度(ax、ay、およびaz)、角速度(x、ωy、ω z)の独立した測定値を提供します。磁場(mx、私、およびmz)。IMU は通常、航空機の重心 (CG) の近くに取り付けられ、センサー軸が航空機のボディ軸に合わせて配置されています(図 3に示すように)。
小型のIMUセンサーパッケージを低コストで提供できるようになりました。各センサーはアナログ電圧を放出し、ローカルで処理したり、フライト コンピュータに直接送信したりできます。統合慣性ナビゲーションシステム(INS)は、IMUとGPS受信機を組み合わせたものです。GPS ユニットは、衛星信号を内部的に、NED (北東ダウン) などのローカル座標フレームで表される航空機の緯度、経度、高度、3D 線形速度など、地球上の慣性位置の推定値に変換します。IMU単独では、航空機の姿勢を安定させることが可能です。ただし、INS を使用すると、航空機は所定の飛行軌道を追跡できます。
空力力は対気速度に強く依存しているため、V、固定翼航空機は、良好な飛行管制官の性能を向上するために気流の測定を必要とします。流量測定は、空気データシステム(ADS)を使用して収集されます。小規模航空機では、多くの場合、対気速度のみが測定されます。高性能航空機では、流れ方向と速度の測定が必要です。
航空機の対気速度 V を測定するために使用される基本的なピトースタティックシステム [4] を図 4 に示します。ピトー管自体に対向する流れに直接向かう中央の穴がある。この穴は、中央チューブを介して差圧センサの1つのポートに接続されます。ピトー管の外側に等しく間隔をあけた4つの穴は、単一の周辺チューブを介して差動センサの他のポートに接続される。中央管は、流速がゼロの点での空気圧である停滞または総圧力、PTを測定します。外側の管は、フリーストリーム対気速度で移動する流れに関連する静気圧P S、Vを測定します。 4つの周辺ポートからの結合圧力は、ピトー管との流れのずれと小さな流れの乱流を考慮するために、4つの静的圧力測定値を平均します。対気速度は、大気密度を与えられたベルヌーイの方程式から計算されます。
 (1)
(1)
ピトー管システムによって測定された動的(差動)圧力は次のように与えられる:
 (2)
(2)
対気速度 Vは、次のように指定されます。
 (3)
(3)
図5に示す5穴プローブ[5]は、フリーストリームの流角と速度を測定する機能を提供します。このプローブは、ベースラインピトースタティックシステムの拡張であり、中央管からのPTも測定する。中央総圧力ポートの上下および両側の他の4つのポートは、通常、絶対圧力センサに接続します。攻撃角度αは、水平飛行中のピッチ角度θと一致し、上下の圧力測定値を比較する関数から計算されます。
 (4)
(4)
キャリブレーション機能は、5 穴プローブを(小さな)風洞に入れて決定し、その後、風洞圧力データを最小飛行と最大予想飛行の間の一連の既知の攻撃角度に適合させる曲線を決定します。αの値。同様に、通常は小さいサイドフロー(サイドスリップ)角度βは、左右の圧力測定値を比較する関数から計算されます。
穴プローブを(小さな)風洞に入れて決定し、その後、風洞圧力データを最小飛行と最大予想飛行の間の一連の既知の攻撃角度に適合させる曲線を決定します。αの値。同様に、通常は小さいサイドフロー(サイドスリップ)角度βは、左右の圧力測定値を比較する関数から計算されます。
 (5)
(5)
同様に、キャリブレーション機能 は、βの最小飛行値と最大予想飛行値の間の一連の既知のサイドスリップ角度条件にわたって収集されたカーブフィッティング風洞圧力データによって決定されます。
は、βの最小飛行値と最大予想飛行値の間の一連の既知のサイドスリップ角度条件にわたって収集されたカーブフィッティング風洞圧力データによって決定されます。
IMU と ADS を使用すると、航空機は姿勢、角度速度、対気速度(および方向)を感知できます。GPS ユニットは、通常、市販の INS またはフライト コンピュータへの別個の GPS 専用インターフェイスを介して接続され、慣性位置と速度の測定値を提供します。GPSユニット[6]は、複数の衛星からの到着時刻データを集約し、三角測量から受信機の位置を推定します。ベースラインGPSは、オープンエリアで1〜3メートルの順序で位置精度を持っています。ほとんどの UAV はベースライン GPS ユニットをホストします。GPSはまた、位置推定誤差をメートル以下に減らすローカルリージョンの信号源から広域拡張システム(WAAS)信号[7]を受信することもできます。GPS位置は、地球の座標系(通常はLLA)で測定されます(緯度、経度、高度)。GPS はまた、NED (北東ダウン) または ENU (北東-北上) 地球ベースの座標系で、地球に対する航空機の 3D 速度のローカル測定も提供します。GPS ユニットは、位置と速度の情報を内部的に計算し、これらの値をオンボードフライト コンピュータに伝達します。
GPS を使用すると、航空機は地球固定座標フレーム内のウェイポイントで記述された飛行計画に従います。多くのミッション(例えば、小さなUAV監視)は、UAVがローカル環境に関してナビゲートすることを要求します。この目的のために、UAVはまだGPS受信機を運ぶことができますが、ローカル環境に関してナビゲートするために、カメラ、レーダー、またはLIDARなどのオンボードセンサーに依存します。多くの研究者は、GPS信号受信が信頼できない都市キャニオン環境での検索と救助[8]のアプリケーションや小さなUAVローカリゼーションなど、オンボードセンサーを使用してローカル環境に関するUAVナビゲーションを研究してきました[9]。
データ取得(DAQ)とセンサーキャリブレーション
各 IMU および ADS センサーは、アナログからデジタル (A/D) コンバータを通過するアナログ電圧を放出し、次にデジタル プロセッサまたはマイクロプロセッサを通過します。A/D変換は、フライトコンピュータ上で直接実行することも、専用のマイクロプロセッサがA/D変換を実行してデータを再送信することもできます。信号は長い信号線で失われるため、センサ信号源に近いA/D変換を行うことが有利です。したがって、多くの現代のImUsはマイクロプロセッサを埋め込み、(ロスレス)シリアル接続を介してデジタル化された電圧測定値を送信します。例えば、MPU-9250は、9つのIMUセンサー(3加速度計、3レートジャイロ、3軸磁力計)とマイクロプロセッサを単一のプリント回路基板にホストします。収集されたデータは、I2Cシリアル接続[10]を通してフライトコンピュータに配布されます。
このデモでは、I2C 接続を備えた IMU の使用と、2 つの組み込みコンピューティング プラットフォーム (ダイヤモンド システムアテナ II とビーグルボーン ブルー) を使用したフライト コンピュータ上のアナログ データの直接収集について説明します。彼らは、その多様なハードウェアインターフェイス機能のために選択されました。どちらも軽量で、小さなUAVへのインストールに適した小さなフォームファクタを持っています。アテナIIは確立された製品です。その強みは、軽量のQNXニュートリノリアルタイムオペレーティングシステムを使用して、最大3 kHzの信頼性の高いデータ取得を保証する高解像度(16ビットA/D)データ解像度にあります。Linux のバリエーションを実行するビーグルボーンブルーは、低解像度のA/Dコンバータを備えていますが、I2Cを含むさまざまなシリアルデバイスにインターフェースします。ビーグルボーンは低コストで、より高速なプロセッサを備えており、多数のLinuxベースのアプリケーションと互換性があります。したがって、低コストの実験のためのより良い汎用的な選択です。Athena IIは、フレキシブル翼実験UAVプラットフォーム[11]のような研究ベースの飛行データ取得への応用を用いてセンサデータを直接捕捉する際の有用性を実証するためにこの実験で使用される。
フライトコントロールを展開する前に、IMUセンサーとADSセンサーを適切に校正する必要があります。エンドツーエンドのキャリブレーションは、物理センサー出力が A/D コンバータを通過してコンピュータに変換され、MKS (メートルキログラム秒) 単位に変換されるにつれて、電圧スケーリングとバイアスを表します。
 (6)
(6)
取得した信号(ボルト 単位)はバイアス電圧、bによって相殺され、その後、因子mでMKS単位読み取り値
単位)はバイアス電圧、bによって相殺され、その後、因子mでMKS単位読み取り値 にスケーリングされます。シリアルインターフェイスを備えたIIMは、製造元のキャリブレーションに基づいてボルトまたはMKSユニットで読み取り値を収集するオプションを提供する場合があります。IMUまたはADSの直接取得されたセンサデータは、各A/Dチャンネル(カウント内)から整数値を読み取る必要があり、これはA/Dコンバータの分解能(例えば、12ビットまたは16ビット)とフルスケール電圧範囲に基づいて浮動小数電圧読み取りに変換されます。デフォルトのセンサーキャリブレーションと A/D 変換プロセスの両方で不正確さを考慮すると、通常は DAQ パイプラインに完全に統合された IMU と ADS をキャリブレーションするのが有利です。
にスケーリングされます。シリアルインターフェイスを備えたIIMは、製造元のキャリブレーションに基づいてボルトまたはMKSユニットで読み取り値を収集するオプションを提供する場合があります。IMUまたはADSの直接取得されたセンサデータは、各A/Dチャンネル(カウント内)から整数値を読み取る必要があり、これはA/Dコンバータの分解能(例えば、12ビットまたは16ビット)とフルスケール電圧範囲に基づいて浮動小数電圧読み取りに変換されます。デフォルトのセンサーキャリブレーションと A/D 変換プロセスの両方で不正確さを考慮すると、通常は DAQ パイプラインに完全に統合された IMU と ADS をキャリブレーションするのが有利です。
IMUの場合、加速度計電圧は毎秒1メートルあたりのゼロ加速度に対して読み取り値にスケーリングされ、レートジャイロ電圧は1秒あたりの角速度ゼロに対して読み取り値にスケーリングされます。磁力計のキャリブレーションは、局所的な妨害源を説明するより慎重なプロセスを必要とします [12].この実験では、レートジャイロと加速度計を校正するためのレートテーブルの使用を示す。複雑な環境では、キャリブレーションで最善の努力を払っても磁力計が正確でない場合があることに注意してください。このような場合、見出しは、GPS速度ベクトル針路の考慮など、代替手段によって決定される。
信号フィルタリング
センサー信号には、必然的に電気ノイズだけでなく、飛行中の構造振動などの物理的なソースからのノイズも含まれます。このようなノイズは、通常、データ内の単一の外れ値と高周波ノイズの形式を取ります。どちらも低レベルの信号フィルタリングで減衰できます。実験では、高周波ノイズを減衰させる移動平均フィルタと、単一チャンネルのシーケンシャル信号からの信号外れ値を拒否する中央値フィルタ、または画像からの「塩とコショウ」の2つの一般的に適用されるセンサ信号フィルタ(13)が適用されます。単純移動平均は、リアルタイム制御シナリオで最近取得したnデータ値の平均値として現在の信号を推定します。後処理では、各信号は、タイムシフトの影響を避けるために、前と将来のデータポイントの同数から推定されます。したがって、フライトコントロールに使用可能なリアルタイムの重み付けされていない移動平均推定値は、次の方法で指定されます。
 (7)
(7)
ここで、 時間ステップk-iの単一のセンサーデータ値
時間ステップk-iの単一のセンサーデータ値 であり、時間ステップkの移動平均推定値です。nの値が大きいと、高周波ノイズが効果的に除去されますが、信号推定値に時間遅延を導入するという欠点があります。また、実際の一時的な信号をフィルタリングすることもできます。移動平均推定値に対する古いデータの影響を最小限に抑えるために、データは多くの場合、データに直線的または指数的に重み付けされ、最新のデータ ポイントが移動平均結果に古いデータ値よりも多く影響を与えます。
であり、時間ステップkの移動平均推定値です。nの値が大きいと、高周波ノイズが効果的に除去されますが、信号推定値に時間遅延を導入するという欠点があります。また、実際の一時的な信号をフィルタリングすることもできます。移動平均推定値に対する古いデータの影響を最小限に抑えるために、データは多くの場合、データに直線的または指数的に重み付けされ、最新のデータ ポイントが移動平均結果に古いデータ値よりも多く影響を与えます。
単一チャネル信号の中央値フィルタは簡単です。最後のd生データ値が配列またはセットで収集され、偶数の値が与えられた 2 つの中間値の中央値または中央値が返されます。
 (8)
(8)
ここで、 単一のセンサーデータ値
単一のセンサーデータ値 であり、時間ステップkでフィルタリングされた中央値の出力です。高周波ノイズと外れ値の両方の対象となるデータは、中央値フィルタと移動平均フィルタの両方を通じて順番に処理されることがよくあります。外れ値が移動平均結果に影響を与えないように、中央値フィルタが最初に適用されます。nおよびdの値はユーザー定義ですが、通常は[3, 10] の範囲で、データが制御の決定に使用されるよりもはるかに高いレートで取得されない限り、[3, 10] の範囲内にあります。
であり、時間ステップkでフィルタリングされた中央値の出力です。高周波ノイズと外れ値の両方の対象となるデータは、中央値フィルタと移動平均フィルタの両方を通じて順番に処理されることがよくあります。外れ値が移動平均結果に影響を与えないように、中央値フィルタが最初に適用されます。nおよびdの値はユーザー定義ですが、通常は[3, 10] の範囲で、データが制御の決定に使用されるよりもはるかに高いレートで取得されない限り、[3, 10] の範囲内にあります。
手順
この手順では、IMU および ADS センサーのキャリブレーションとフライト コンピュータとの統合について説明し、屋外飛行施設での統合された INS および ADS データの取得と処理の使用方法を示します。ミシガン大学のM-Airネット飛行試験施設で動作するクワドローターのエンドツーエンドの飛行制御が実証されています。
1. センサーキャリブレーション:慣性測定ユニット(IMU)
センサーの口径測定は、高品質の試験装置からのサポートを使用して実行する場合に最も効果的です。3 軸 IMU の場合は、精度レート テーブルを使用して、各軸のレート ジャイロと加速度計を個別に調整します (図 6)。レートテーブルは、ユーザー定義の角速度で正確に回転します。ユーザーは一連のレート コマンドを発行し、その間に IMU はセンサーのキャリブレーションに必要なデータを収集します。したがって、以下に説明する単軸キャリブレーション実験は、IMUセンサ軸(x、y、z)ごとに1回、3回繰り返される。
- キャリブレーションされるセンサー軸が放射状に内側または外側に向けられるようなレートテーブルに IMU をマウントします。
- テーブルの中心から IMU 中心の中心までの距離を測定します。これは、円運動の基準半径です。
- DAQ コンピュータ、IMU、およびバッテリをレート テーブルに直接取り付け、すべてのコンポーネントを直接接続します。
- IMU レートとアクセラレーション データを収集するソフトウェアをセットアップします。
- レートテーブルは動きのない、レコードレートジャイロ、加速度計バイアス値です。
- 異なる正と負の定数率テーブル回転率を持つ一連の実験を行います。センサーのキャリブレーションは直線的であることが予想されます。0(ベースライン)、±15、±30、および±60度/秒の速度でデータを取得します。テーブルはより速い速度で回転することができますが、選択された値は典型的なUAV飛行操作で期待される信号をカバーするのに十分です。
- 上記の角速度値ごとにキャリブレーションされているレートジャイロと加速度計からデータを収集します。一定のレートを維持するために、データを収集する前に各回転率を設定する必要があります。10 ~ 15 s を超えるデータを収集し、データ収集率が少なくとも 30 ~ 100 Hz であると仮定して、障害が最終的な校正値から除外されるようにします。
- レートテーブルからIMUを取り外し、加速度計がポイントダウンする方を向きます。
- コンピュータシステムを介して+1gのデータを収集します。
- IMUを反転して、キャリブレーションされる加速度計がポイントアップし、コンピュータシステムを介して-1gデータを収集します。これらの余分なデータポイントは簡単に取得でき、±1gのレートテーブルデータから得られる各線形キャリブレーション曲線を検証するために使用できます。 1g値は、クワッドコプター本体に対する方向「下降」を決定するために線形加速度計データを使用するため、正確にキャリブレーションするために特に重要です。
- データを処理します。取得した電圧を MKS 単位回転率 (ジャイロ) と線形加速度 (加速度計) に関連付けるジャイロおよび加速度計データ ポイントの線形曲線適合を開発します。キャリブレーションエラーが十分に低いことを確認します。レートテーブルはジャイロキャリブレーションのための角速度の直接制御を提供することをなおくね。対応する加速度は、円運動の感心力によって誘導され、レートテーブルの中心から指定された角速度ωとIMUの半径rから計算することができる。
 (9)
(9)
2. クワドローター飛行実験
最後の一連の実験では、IMUとピトーシステムをクワッドローター(図7参照)に取り付け、ミシガン大学のM-Airネット飛行施設で飛行します。車両は、Ardupilotオープンソースオートパイロットパッケージのポートを介してビーグルボーンブルー(マイクロプロセッサを使用しない)に安定させ、ミッションプランナー地上局ソフトウェアを介して飛行する前に設定されます。無線制御送信機/受信機インターフェイスを使用すると、パイロットはクアドロター高度、左右の動き、およびクアドロターロール角度、ピッチ角度、ヨー角度を規制するArdupilotの「インナーループ」飛行制御法に向かう「外側ループ」コマンドを提供することができます(見出し)、および高度。[14]
クワッドロータは安定させるために対気速度フィードバックを必要としないため、ArdupilotはIMUデータと、離陸高度圧力に対するプログラム初期化時に校正される高度の圧力センサのみを使用して、与えられた飛行を安定させます。パイロット入力。Ardupilotの完全に自律的な拡張は、GPSまたは他のセンシングシステムからの慣性位置データ(例えば、高速モーションキャプチャ)を必要とします。我々の実験は制約された環境で四回転子で行われたので、ピトー空気データシステムは必要ない。 しかし、ピトーシステムは、不確実な風の環境に続いて正確な飛行経路を試みる固定翼機やマルチコプターにとって不可欠です。[15, 16]飛行試験手順は、飛行前試験、飛行試験、飛行後の3つのフェーズに分かれています。この区分は、確立されたコックピットチェックリストを使用して有人航空機のパイロットが続く手順に似ています。[17]
飛行前
- 電池を充電し、インストールする前にそれらをテストします。
- 明確なテスト環境(屋内または屋外)を確立し、無関係な人々が明確なままであることを保証するために領域をマークします。
- フライト テスト チームが、計画されたテストを実行するためのブリーフィングと修飾 (トレーニング済み) であることを確認します。
- 屋外で飛行する場合は、航空機とパイロットがFAA規則に従って登録され、認定されていることを確認してください。野外試験には、コマンドのパイロット(PIC)、視覚観察者(VO)、地上局のオペレータの3人以上が必要です。私たちのテストのために、クワッドローターは屋外の網張りの施設で飛びます。2つのテザーオペレータは、車両が屋内テストのために離れて飛ぶことができないことを保証します。UAVはオープンな屋外スペースを占有していないため、特定のFAA規制はネット飛行試験には適用されません。
- フライト コンピュータと地上局のラップトップの電源を入れます。
- 予備データを収集して、センサーが正しく機能していることを確認します。パイロットチームとサポートチームは、フライトプランを明確に理解し、中止/復旧手順が整っていることを確認する必要があります。
フライトテスト
- 地上局でデータ取得を開始します。
- 飛行エリアがクリア/セーフであることを確認します。
- アームスラスター/モーター。
- フライト テスト シーケンスを開始します。
- パイロットは、最小限を含む各ステップを呼び出して、飛行テストを実施します。
離陸(打ち上げ)、飛行モードの変更、既知のウェイポイント目標または操縦、および着陸。 すべての人員がタスクに従事していることを確認し、必要に応じて緊急手順 (フライト終了) を実行します。ウェイポイントと軌道は、各フライトに固有です。クワドローター実験では、一定の高度と針路で適度に攻撃的な十字と長方形のパターンに従い、その後に上昇/降下、ヨーシーケンスを行います。このフライトの角度速度と線形加速度はデータで簡単に識別でき、IMU とフライト コントローラーが正しく機能していることを確認します。
ポストフライト
- 誤ってオンにならないようにモーターを解除します。
- フライトデータを保存してアーカイブストレージにダウンロードします。
- パイロット、VO、および地上局のオペレータのフィードバックごとに単語でフライトをログに記録します。
- バッテリーを確認し、必要に応じて充電します。
- 機器を回収し、次の乗員のための領域をきれいにします。
結果
センサーキャリブレーション
レートジャイロキャリブレーションプロットの例を図8に示します。この場合、レートジャイロは2.38Vの公称(ゼロ速度)読み取り値を毎秒6つの異なる回転速度で収集し、線形曲線がこのデータに適合した。図に示すように、線形フィットは、収集されたすべてのデータ ポイントの非常に良好な近似を提供します。
飛行試験結果
図 9は、屋内環境で飛行するクワドロータの 30 s 横加速度データセットの生データとフィルター処理されたデータを示しています。フィルタ値dとnは比較的大きいため、フィルタリング プロセスの影響を明確に示します。図に示すように、生データノイズは減衰されます。ただし、フィルタされたデータには顕著な時間遅延が存在し、例えば、t=5 s の直前の(減衰された)正の加速トレンドに存在します。 このプロットでは、全体的な加速トレンドに小さな負のバイアスが付きます。これは、重力加速度の小さなコンポーネントがx軸加速度測定で指摘されるような、クワドロータ スラスタ平面に対する IMU マウントのわずかなピッチが原因である可能性があります。 このようなオフセットは、目視検査によってのみセンサーを位置合わせする場合に一般的です。

図 1.航空機に作用する基本的な力。この図のより大きなバージョンを表示するには、ここをクリックしてください。
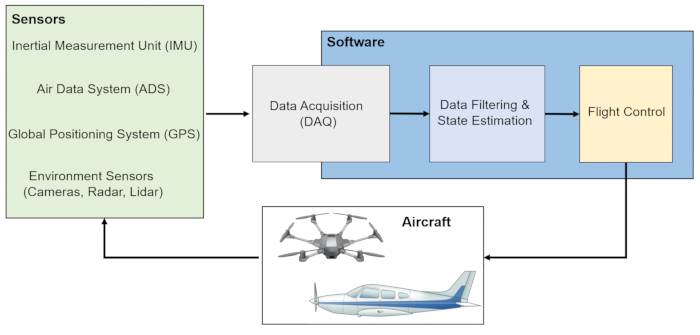
図 2.センサーからフライトコントロールへのデータパイプライン。この図のより大きなバージョンを表示するには、ここをクリックしてください。
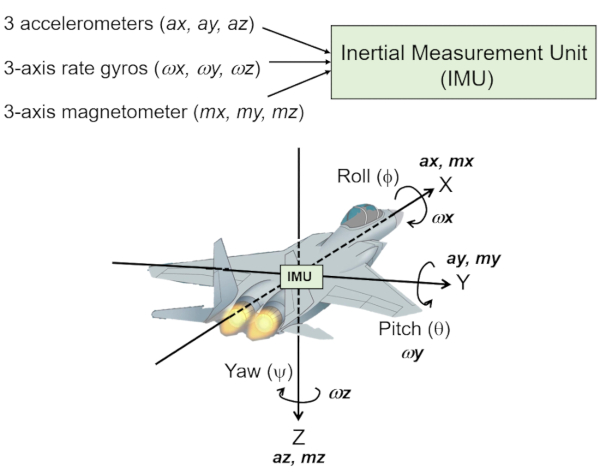
図 3.慣性測定ユニット(IMU)センサーと軸規約。この図のより大きなバージョンを表示するには、ここをクリックしてください。

図 4.対気速度(V)測定用ピトー管システム。この図のより大きなバージョンを表示するには、ここをクリックしてください。

図 5.対気速度(V)、攻撃角度(a)、サイドスリップ角度(b)測定用5穴プローブシステム。この図のより大きなバージョンを表示するには、ここをクリックしてください。

図 6. 単一軸レートテーブルを使用したIMUセンサキャリブレーション。 図に示すように、z軸レートジャイロ電圧は、指揮された角速度、w、およびx軸加速度計ごとに直接校正することができ、角度速度wを与えられた求心速度から校正し、測定することができますレート テーブルの中心から IMU 重心までの半径r。 IMUは回転し、他のレートジャイロおよび加速度計の軸からの測定を校正するために再取り付けすることができる。この図のより大きなバージョンを表示するには、ここをクリックしてください。
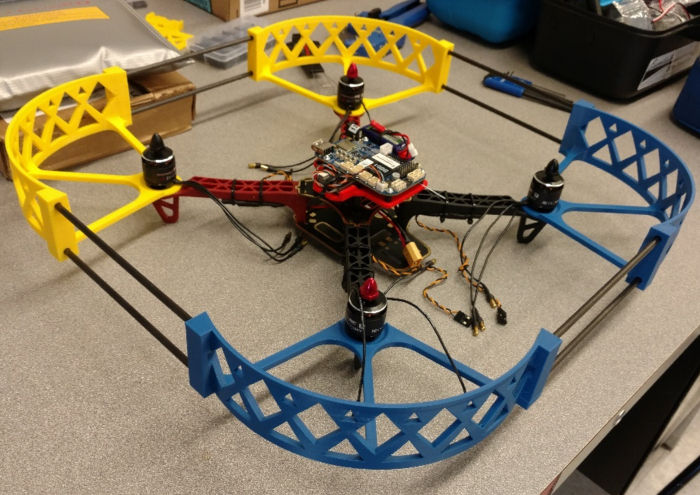
図 7.フライトテストに使用されるビーグルボーンブルーのクワドロータープラットフォーム。この図のより大きなバージョンを表示するには、ここをクリックしてください。

図 8. レートジャイロ例キャリブレーション例。この図のより大きなバージョンを表示するには、ここをクリックしてください。

図 9. 例 Quadrotor 横 (x) 加速度計データ抜粋 d =8の中央値フィルターを使用し、ウィンドウn=15 を持つ移動平均フィルタを使用します。 生データは青色の傾向で示され、フィルタリングされたデータはオレンジ色で表示されます。この図のより大きなバージョンを表示するには、ここをクリックしてください。

図 10.固定翼の小型UAS GPS、加速度計、レートジャイロ飛行試験データの例。 信号フィルタリングの必要性を示すために、未加工の(フィルタリングされていない)データが表示されます。この図のより大きなバージョンを表示するには、ここをクリックしてください。
申請書と概要
ここでは、固定翼および回転翼航空機のリアルタイム飛行制御を可能にするために必要なセンサーシステム、データ集録、および信号フィルタリングプロセスについて説明しました。このデータパイプラインは、すべての有人および無人航空機の自動操縦システムの不可欠な要素です。マルチコプターは、安定させるためにオートパイロットを必要とし、すべてのタイプの航空機は、空中データを含むミッションを行うますます自律的な航空機システムに向かうにつれて、すべての操作のためのリアルタイムのデータ取得と飛行制御に非常に依存していますコレクションおよびペイロードトランスポート。市販のセンサーパッケージは統合できますが、さまざまな環境でセンサーの機能と制限を理解するには信頼性が重要です。たとえば、降水量が多い場合や氷がピトー管を塞ぐ可能性があり、都市の渓谷構造物はGPS信号を遮断できます。
さらに、異常な態度は、オイラー・アングルの姿勢表現に依存する状態推定計算の拡張を必要とする場合があります。余分なセンサーの統合によって得られる弾力性と、冗長センサーをサポートするために必要な余分なコストと重量の間には、固有のトレードオフがあります。最も低コストの小型 UAV は、ここで説明するフライトコントロール用のセンサーのベースライン スイートを引き続き採用する可能性があります。商用輸送機や戦闘機などの最も信頼性の高い航空機は、ここで説明するようなセンサーに基づいて状態の見積もりを行いますが、航空機のフライトコントローラーが信頼できるトリプル冗長性とセンサーの多様性に依存しています。センサーの故障や非常に困難な環境条件の可能性にもかかわらず、正確な状態の見積もり。
図 10は、小さな固定翼 UAS 飛行試験から取得したサンプル GPS および (未加工の) IMU 時間履歴を示しています。GPS データは、無線制御リンクを介してパイロットが手動で飛行したローカルのうろつきパターンを示しています。生のIMU時間履歴は信号を示すが、実質的な信号ノイズも示す。 この騒音は、主に推進ユニット(モータ)によって誘発される機体構造振動から生じ、軽量の木材または複合構造を備えた固定翼小型UASに典型的です。 なお、データはゴムマウントで構造からIMUを振動的に分離した後に収集され、信号フィルタリングの強い動機付けを提供します。 時間応答データでは、離陸(起動)はt=100sの直後に行われ、着陸はt=450 sの直前に発生する大きさのデータ「スパイク」で見られます。
確認
我々は、プラシン・シャルマ氏、マシュー・ロマーノ氏、ミシガン大学のピーター・ガスケル博士が実験の設定と実施に協力したことを認めます。
タグ
スキップ先...
このコレクションのビデオ:

Now Playing
リアルタイムフライトコントロール:埋め込みセンサーキャリブレーションとデータ取得
Aeronautical Engineering
10.3K 閲覧数

模型航空機の空力性能:DC-6B
Aeronautical Engineering
8.3K 閲覧数

プロペラの特性評価:性能のピッチ、直径、ブレード数の変動
Aeronautical Engineering
26.5K 閲覧数

翼挙動:クラークY-14翼上の圧力分布
Aeronautical Engineering
21.2K 閲覧数

クラークY-14ウィング性能:ハイリフトデバイス(フラップとスラット)の展開
Aeronautical Engineering
13.4K 閲覧数

乱流球法:風洞流量の評価
Aeronautical Engineering
8.7K 閲覧数

円筒形のクロスフロー:圧力分布の測定とドラッグ係数の推定
Aeronautical Engineering
16.3K 閲覧数

ノズル解析:収束と収束発散ノズルに沿ったマッハ数と圧力の変動
Aeronautical Engineering
38.0K 閲覧数

シュリーレンイメージング:超音速流機能を可視化する技術
Aeronautical Engineering
11.7K 閲覧数

水洞における流れの可視化:デルタウィング上の最先端渦の観察
Aeronautical Engineering
8.2K 閲覧数

表面染料フロー可視化:超音速流のストリークラインパターンを観察する定性的方法
Aeronautical Engineering
4.9K 閲覧数

ピトースタティックチューブ:空気の流速を測定する装置
Aeronautical Engineering
49.3K 閲覧数

一定温度麻酔:乱流境界層の流れを研究するツール
Aeronautical Engineering
7.3K 閲覧数

圧力トランスデューサ:ピトースタティックチューブを用いてキャリブレーション
Aeronautical Engineering
8.5K 閲覧数

マルチコプターエアロダイナミクス:ヘキサコプター上の推力の特徴付け
Aeronautical Engineering
9.2K 閲覧数
Copyright © 2023 MyJoVE Corporation. All rights reserved