
AC 同期機の特性評価
概要
ソース: アリ バッツィ、電気工学科大学コネチカット州ストーズ、ct 検査
三相巻線形モータはロータのフィールドに必要なブラシによる永久磁石ローター同期モータよりも人気。同期発電機は、優れた周波数と電圧の制御があるとはるかに共通、ほとんどの既存の発電所で利用できます。同期モータは、ローターの回転速度はまさに固定子の磁界速度、モーターのシャフトが読み込まれてどのくらいに関係なく、一定にローターの回転速度と同じという事実のためにほとんど 0% の速度の規則の利点を持ってください。したがって、固定高速アプリケーションに非常に適しています。
この実験の目的は、負荷がモータの力率の影響を与えるさまざまな負荷の V 曲線三相同期モータの開始の概念と負荷の端子電圧と起電力バック間の角度に及ぼす影響を理解
原則
同期機は、誘導機の導入された回転磁場の概念に依存します。機械の固定子に三相電流は、所望の周波数で一定の大きさの回転磁界を生成します。同期および非同期のマシンとの違いは、後者が短絡巻線または回転子側に「リスの檻」同期機はローター側固定磁場を持っています。この磁場は、刺激物や永久磁石によってどちらか提供されます。永久磁石同期機は高効率とコンパクトなサイズより一般的になっているが、彼らは通常、希土類系物質を利用します。同期の用語では、固定子の回転磁界としては固定子から独立しているローター磁場、回転磁界にロックおよび同じ速度 (または同期速度) で回転するローターを引き起こすためにが使用されます。
三相巻線形同期電動機を起動するには、界磁巻線はショート マシンが誘導電動機として動作します。マシン速度は同期速度に近い、ショート サーキットが削除され、界磁巻線に直流電圧が適用されます。これは回転子と固定子の磁界をロックし、このように、ロータとステータの同期が達成されました。この演習では同期モータは「誘導開始」の位置にそのインタ フェース プレートのトップ ・ スイッチを持っていることによって開始され「同期実行」の位置にスイッチを反転速度が定常状態に達すれば。
手順
1. DC テスト
- その端子間でショート回路と低消費電力 DC 電源を入れます。
- 1.8 A. 低消費電力 DC 電源の電流を制限します。
- 供給の電源を切り、ショート サーキットを外します。
- 1 と同期モータの 4 ポートの電源端子に接続します。
- 供給電源、直流電圧・電流を測定します。電流 1.8 a. に到達するため必要に応じて電圧を変化します。
- 電源をオフにし、ポート 2 と 5、3 と 6 のポートの前の 2 つの手順を繰り返します。
- 低消費電力 DC 電源アダプターを取り外します。
2. 同期マシン起動
- 三相の切断スイッチ、同期モータのスイッチ、および DC モーター スイッチすべてをしていることを確認します。
- 変圧器が、0% であることを確認します。
- 三相のコンセントを変圧器に配線し、図 1 に示すようにセットアップを接続します。
- デジタル電力計の電流プローブの 1000 に 1 のスケーリングを設定してください。
- 「スタート/実行」スイッチが「スタート」位置にあるを確認します。
- 三相切断スイッチを入れます。
- デジタル電源メーター読み取り約 115 V までの出力変圧器が急増します。
- 電機子電流私AC1、電機子電圧VAC1、本当の力、力率を測定します。
- 相 (行に依存しない) 電圧と相電流の位相「a」は覚えているパワー メーターに電源係数測定正しく相あたりの力率を反映しているので、測定します。
- トルクとマシンの速度を測定します。
- 125 V DC 電源を入れます。すべての接続は、電源端子から明らかであることを確認します。
- 供給の「スタート」ボタンを押すし、電源出力を 125 V に設定します。
- 」スタート/実行」のスイッチを「実行」の位置にします。機械音の変化に注意を払います。機械音は固定子の回転磁界にローター磁場ロックと滑らかになります。
- レコード、アーマチュア現在私は AC1、電機子電圧VAC1、本当の力、力率と界磁電圧と DC 電源からの電流は、表示を指定します。
- 測定し、トルクやマシンの速度を記録します。
- DC 電源、フリップ」スタート/実行」を「スタート」位置切り替えると 0% に戻る、変圧器セット切ります。
- 三相切断スイッチを切ります。回路の残りの部分はそのまま残します。

図 1: 同期モータを起動するセットアップの図。この図の拡大版を表示するのにはここをクリックしてください。
3. 負荷トルク角度に与える影響
- 三相の切断スイッチを確認してください、同期モータ スイッチ「1S」、DC モーター スイッチ「S2」がすべてオフ。
- その中に注意してください"S1"は同期モータ側に直流機端末間での"RL"負荷接続/切断するものです。
- 変圧器が、0% であることを確認します。
- 図 2 に示すようにセットアップを接続、200 Ω に「RL」を設定。
- 「スタート/実行」スイッチが「スタート」位置にあるを確認します。
- 三相切断スイッチを入れます。
- デジタル電源メーター読み取り約 115 V までの出力変圧器が急増します。
- 125 V DC 電源を入れます。すべての接続は、電源端子から明らかであることを確認します。
- 供給スタート ボタンを押すし、電源出力を 125 V に設定します。
- 」スタート/実行」のスイッチを「実行」の位置にします。
- アーマチュア現在私は AC1のレコード、電機子電圧VAC1、本当の力、力率、およびフィールド電圧と DC 電源からの電流は、表示を指定します。
- 測定し、トルクやマシンの速度を記録します。
- シャフト近くにストロボ光を維持し、初期角度 δoを測定します。
- ストロボ ライトの設定を定期的に電源コンセントに接続し、それを入れます。
- 粗ノブ 1 4 極 60 Hz 機の同期速度は、1,800 RPM に十分に近くにストロボの光で読書速度を調整します。ラウンドで同期速度を計算/分 (RPM) n= 120 xf/P 、 fは頻度とPは極数。
- モーター シャフトの端に直面するストロボ ライトを配置し、シャフトが固定表示されるまでいいノブを調整します。人間の目はシャフトの速度と一致はストロボ光周波数 (または速度の読書) を持っていることによって静止軸を参照してくださいにだまさ。
- 「S1」をオンし 3.11 に 3.9 の手順を繰り返しますが、δ1として新しい角度を測定します。
- 「S2」をオンし 3.11 に 3.9 の手順を繰り返しますが、δ2として新しい角度の測定します。
- 「S2」の電源を切り、「RL」を 100 Ω に変更。
- 「S2」をオンし 3.11 に 3.9 の手順を繰り返しますが、δ3として新しい角度の測定します。
- DC 電源フリップ」スタート/実行」は「スタート」位置スイッチ オフするをオフ」S1""S2"とセット変圧器が 0% に戻る。
- 三相切断スイッチを切ります。回路の残りの部分はそのまま残します。

図 2: 負荷のトルク角度に及ぼす影響を研究するセットアップの図。この図の拡大版を表示するのにはここをクリックしてください。
4. フィールド電流の力率に及ぼす影響
このセクションは、V 字の 1 つの側面を調査します。
- 三相断路器、同期モータ S1、DC モーター スイッチし、S2がすべてオフになっていることを確認します。
- 変圧器が、0% であることを確認します。
- だけとは異なる図 2 シリーズ フィールド抵抗「RF」を追加することにより、図 3 に示すようにセットアップを接続、200 Ω に「RL」を設定。
- 10 Ω の位置に「RF」を設定。"RF"では、目標はフィールド電流のみを変化させるのでこの実験の測定は必要ありません。
- 「スタート/実行」スイッチが「スタート」位置にあるを確認します。
- 三相切断スイッチを入れます。
- デジタル電源メーター読み取り 115 V までの出力変圧器が急増します。
- 125 V DC 電源を入れます。すべての接続は、電源端子から明らかであることを確認します。
- 供給スタート ボタンを押すし、電源出力を 125 V に設定します。
- 」スタート/実行」のスイッチを「実行」の位置にします。
- "RF"= 10、6、3、1、アーマチュア現在私は AC1、電機子電圧VAC1の本当の力、力率、フィールド電圧と電流 DC 電源供給表示からの記録。
- 測定し、トルクやマシンの速度を記録します。
- 10 Ω"RF"にリセットします。
- 「1秒」をオンにし、手順 4.11 に 4.13.
- 「2S」オンにし、手順 4.11 に 4.13.
- 「S2」の電源を切り、「RL」を 100 Ω に変更。
- 「2S」オンにし、手順 4.11 に 4.13.
- DC 電源、フリップ」スタート/実行」を「スタート」位置切り替えると 0% に戻る、変圧器セット切ります。
- 三相の切断スイッチの電源を切り、接続を解除します。
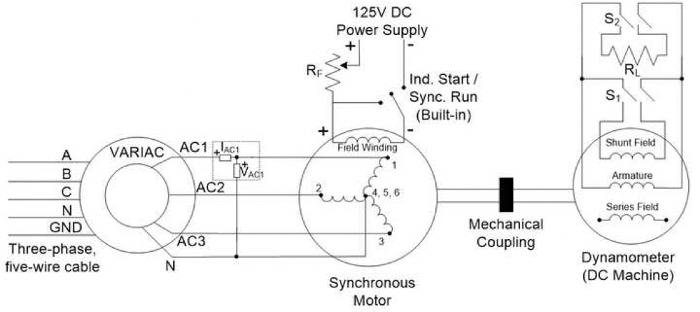
図 3: 現在のフィールドを変更の影響を研究するセットアップの図。この図の拡大版を表示するのにはここをクリックしてください。
結果
ターミナル段階とニュートラルの間適用される直流電流に直流電圧の比抵抗を DC から推定できる DC フェーズをテストします。圃場抵抗性は、界磁巻線に直流電圧を印加して、電流の磁界を測定して同様の方法で測定できます。同期リアクタンス (Xs)、バックアップ マシン (E) の起電力とその関連定数kφを機に本当の力 (P3φ) 測定から見つけることができます: P3Φ = 3VφEAcos(δ)Xs ( Rs固定子の抵抗は無視します)、基本的な力流れ方程式相あたりの等価回路 (図 4)。
V 曲線は、ソース (グリッド) で見られるように、マシンの力率を決定します。V 曲線は、マシンが特定の条件としたがって、グリッド電圧安定性を高めることができるコンデンサーのような行為で無効電力 (大手電力因子) を提供できることを示しています。マシンが「同期コンデンサー」と呼ばれるこのような条件の下で動作しているとき

図 4: 代表的な結果を得るのために使用相あたりの等価回路の概略図。
申請書と概要
同期機は、非常にタイトな速度規制をモーターの軸に一定の速度を必要とするアプリケーションで共通です。このようなアプリケーションは、電気時計、ハード ディスク ドライブなどが同期モータは負荷に電力を提供するために大手電力因子領域で動作を同期コンデンサーに拡張します。力率補正は、コンデンサーを同期アプリケーションで使用される別の用語です。最も一般的な同期発電機が傷回転子同期発電機間、最も一般的な同期電動機が永久磁石モータであることに注意してください。
タグ
スキップ先...
このコレクションのビデオ:

Now Playing
AC 同期機の特性評価
Electrical Engineering
14.3K 閲覧数

電気の安全上の注意および基本的な装置
Electrical Engineering
144.8K 閲覧数

磁気コンポーネントの特性評価
Electrical Engineering
15.1K 閲覧数

電源基板をポール入門
Electrical Engineering
12.5K 閲覧数

DC-DC 昇圧コンバーター
Electrical Engineering
57.1K 閲覧数

DC/DC 降圧コンバーター
Electrical Engineering
21.2K 閲覧数

フライバックのコンバーター
Electrical Engineering
13.3K 閲覧数

単相変圧器
Electrical Engineering
20.2K 閲覧数

単相整流器
Electrical Engineering
23.6K 閲覧数

サイリスタ整流器
Electrical Engineering
17.6K 閲覧数

単相インバーター
Electrical Engineering
18.0K 閲覧数

DC モータ
Electrical Engineering
23.5K 閲覧数

AC 誘導モータ特性
Electrical Engineering
11.7K 閲覧数

VFD 給電 AC 誘導機
Electrical Engineering
7.0K 閲覧数

AC 同期機同期
Electrical Engineering
21.6K 閲覧数
Copyright © 2023 MyJoVE Corporation. All rights reserved